无位置传感器异步电机矢量控制系统研究
2016-09-10 07:28魏宇峰胡文斌
电气技术 2016年8期
魏宇峰胡文斌
(南京理工大学自动化学院,南京 210094)
无位置传感器异步电机矢量控制系统研究
魏宇峰1胡文斌2
(南京理工大学自动化学院,南京 210094)
异步电机因其制造简单、性能高、转动惯量小、可靠性高等诸多优点在变频调速领域得到广泛运用,在国民生活中占据了越来越重要的地位。本文以交流异步电机为研究对象,采用IRMCF341电机主控芯片,分析直流母线单电阻电流采样重构技术,利用反电动势法估算电机转子速度和位置,完成异步电机无位置传感器矢量控制算法。最后对控制系统进行整体实验调试,实验结果表明无位置传感器矢量控制算法是正确可行的。
单电阻电流采样;异步电机;矢量控制
异步电机相对于永磁同步电机具有结构简单,运行可靠,转速高,成本低且易于维护等诸多优点,越来越广泛应用于工农业生产的各个领域,因此对异步电机的调速系统提出了更高的性能要求。
三相异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统[1]。1971年,德国西门子公司的的F. Blaschke与美国的P. C. Custma等提出了基于磁场定向的新型交流电机控制方式,这是最早出现的矢量控制理论雏形。矢量控制算法的核心思想是通过对磁链和转矩的解耦将电机模型等效。
矢量控制算法的核心思想是磁场定向控制,通过坐标变换将定子电流矢量变换至两相旋转坐标系,以运动中的转子为参照物,则定子的励磁和转矩电流矢量可等效为一个直流量,相对于电机转子静止。因此,就可用一台直流电机来等效异步电机,根据磁链定向原理分别对电机的励磁电流和转矩电流进行控制,以达到控制转矩的目的[2],使得交流电机拥有与直流电机一样优越的控制性能。能否准确检测电机的相电流将直接影响电机矢量控制系统的性能。目前高性能电机驱动系统正逐步摆脱软件的束缚向纯硬件方向发展,即基于 FPGA或 ASIC实现电机控制。在这种大环境下,专为控制永磁同步电机和交流异步电机设计的高性能集成芯片IRMCF341应运而生。本文基于国际整流器公司(International Rectifier,IR)推出的IRMCF341电机控制芯片设计无位置传感器控制算法,并搭建软硬件平台实现电机的驱动。
1 异步电机矢量控制算法设计
实现无位置传感器矢量控制算法,首先基于单电阻采样重构计算出电机定子电流,进一步计算出电机反电动势,对反电动势积分获得转子磁链[3],进而得到转子角度,产生带有死区的 PWM控制信号。
1.1单电阻电流采样及相电流重构原理分析
单电阻电流重构技术的算法核心是,直流母线电流与电机相电流的关系由三相逆变器开关状态决定,由此可知,若逆变器的开关状态已知,就可以构造出网侧某相电流。IRMCF341芯片利用单电阻采样从直流母线上获得电流信号,电流信号结合逆变器的开关状态就可以重构出网侧某相电流[4]。以开关矢量(100)作用为例,直流侧电流的流通路径如图1所示,此时直流母线电流idc等于电动机a相电流ia。

图1 逆变器开关状态为(100)的电流通路
采样电阻一次电流采样只能重构出一相电流,只需在一个PWM周期内当2个基本电压矢量分别作用时分时重构出两相电流,然后通过 ia+ib+ic=0就可计算出第三相电流。以电压矢量Uout位于I扇区为例,U4(100)、U6(110)和零矢量在一个分成7段的采样周期内分时作用。为避免开关瞬时变化引起的电流毛刺,通常在矢量作用的中点时刻进行电流采样,即在图2中对应的ts1和ts2处对idc进行采样,定义采样得到的电流为idc1、idc2,则有:ia=idc1,ic=-idc2,ib=-(ia+ic)。
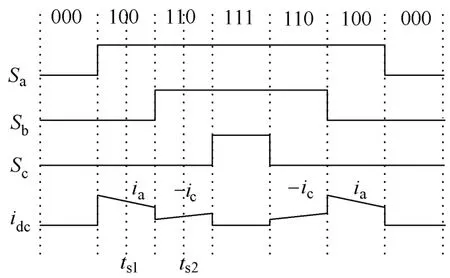
图2 电压作用矢量与母线电流的对应关系
同理,表1列出了在其他扇区内三相电流与两个采样值idc1、idc2的对应关系。

表1 直流母线电流和电机相电流对应关系
实际情况下要实现单电阻采样电流重构有一个基本的前提条件,即在非零空间电压矢量作用时,要保证直流母线电流采样有足够的采样窗口。因此,要完成相电流重构,非零矢量的作用时间至少要大于电流采样一次所需的最短时间。
1.2转子位置与速度估计
本文采用反电动势法估算转子位置,包括磁链观测和角度-频率生成。通过磁链观测器计算得到电机转子磁场的励磁分量。
由坐标变换的相关内容可知,三相静止坐标系下的电流iA、iB、iC和两相静止坐标系下的电流iα、iβ间的转换关系如式(1)所示,即

经过坐标变换得到αβ坐标下的等效电路方程,如式(2)所示,即

磁链计算公式如式(3)所示,即

式中,ψα、ψβ为转子磁链在定子坐标系αβ上的投影,uα、uβ为定子坐标系αβ上的定子电压,iα、iβ为采样电阻采集到的三相定子电流在坐标系αβ上的转换电流,Rs为定子电阻,L为定子电感[5]。
设基于实际转子位置的坐标系为dq坐标系,转子估计位置所在轴线为δγ 坐标系,此外定义一个静止的αβ坐标系,它们的矢量关系如图3所示。
由图3可推出下式的关系:


图3 转子磁链矢量图
式中,K=ψf1,Δθ =θr-θe。定义电机实际的转子角度θr和估计的转子角度θe的差为Δθ,如果Δθ 是已知的,那么利用锁相环结构就可精确求得到转子速度ωe和角位置θe信息。
根据矢量控制的基本原理及SVPWM技术,可建立如图4所示所示的异步电机矢量控制结构图。
2 IRMCF341芯片功能简介
IRMCF341采用QFP64封装,是一款集成了电机运动控制引擎和 8051为处理器的高性能的控制芯片,图5为IRMCF341的内部结构图。
电机运动控制引擎MCE包含电机外设、运动控制时序发生器、用于数据交换的双端口 RAM等硬件电路控制电机的所有控制资源。MCE是软硬件混合体,矢量控制中电流环基于纯硬件电路实现,设置对应寄存器控制参数实现电流环调节;速度环控制基于软件方式,通过修改MCE代码实现调节速度环的结构及弱磁控制。该系统利用直流母线单电阻采样电流,基于专用数模混合电路实现单电阻采样电流重构,采用反电势积分法实现转子位置与速度估计,进一步实现异步电机矢量控制。
除MCE外,IRMCF341集成了8051高速8位微处理器,可实现用户接口、上位机通信等上层控制,其指令系统、基本操作与标准Intel 8051处理器并无不同。8051通过512字节双端RAM向MCE的寄存器组读取、发送信息,实现电机控制、主机通信、上层控制任务及用户接口等功能,除此之外,另提供一个JTAG端口来实现仿真和调试。

图4 异步电机矢量控制结构图

图5 IRMCF341内部结构图
IRMCF341芯片采用双核集成,不仅显著提升电机控制性能,而且大大简化了硬件电路,提高电路可靠性,在控制高速、复杂的电机领域优势显著[6]。
3 电机控制系统的构成与实现
3.1硬件电路设计
本文矢量控制系统包括整流电路、开关电源电路、功率驱动与保护电路、采样电路等,以IRMCF341为核心的硬件电路设计方案如图6所示。

图6 控制系统硬件电路设计方案
该控制系统中,电机相电流信息的准确性直接影响转子角度估算结果,对电机的控制性能至关重要。MCE利用 A/D模块检测采样电阻上的电流信息,经过 RC转换电路,采样电流转换成电压信号送至MCE的A/D口。IGBT驱动电路采用驱动芯片IR21366及其外围电路组成,IR21366是6路集成桥式驱动芯片,其输出电压范围为 10~20V,最大输出电流可为4A。系统利用IR21366接收PWM脉冲信号驱动MOSFET管,逆变模块输出三相电流来驱动电机。
3.2系统的软件实现
系统的软件设计是基于硬件模块实现,MCE模块库提供了全面的功能模块,可根据需要自由组合来实现相应控制方案。
要搭建无位置传感器异步电机的驱动控制系统,第一步基于Matlab/Simulink环境下组合功能模块实现矢量控制算法,生成*.mdl文件;第二步利用MCE编译器在线编译,得到MCE处理器的可执行文件,该可执行文件由结构配置文件、C源代码头文件、寄存器列表及地址文件构成,最后将可执行文件下载到控制芯片中。
软件算法完成后需要进行实际调试,借助机调试工具软件MCE Wizard和MCE Designer调试电机,进一步优化功能寄存器组、电流取样寄存器组的配置电机参数。一旦满足系统实际需要,就可确认驱动参数,8051代码所要完成的工作就是用C语言实现MCE De signer环境下的电机驱动参数调试以及其他功能,使电机控制系统达到设计要求。电机系统调试流程如图7所示。
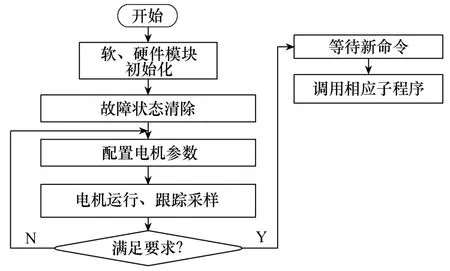
图7 电机系统调试流程图
4 实验结果
本实验选用额定功率500W的无刷异步电机,利用MCE Designer的波形跟踪功能(Trace Setup)采样电机运行波形。
电机控制系统硬件调试平台如图8所示,单电阻电流采样重构波形如图9所示(V、W相),实验波形近似标准正弦波行,显示电流重构模块的优越性能,保证了后续转子位置与速度估计的精确。图10为速度设定和反馈曲线,显示电机虽然运行平稳但无法达到额定的电机速度,所示的问题是电机无法在指定的时间里达到指定的速度,分析力矩参考曲线判断出问题的根源出在速度环PI调节器上。增加速度环PI调节器的积分增益后得到的速度参考和速度反馈、速度环PI输入输出波形如图11、图12所示。可以看出,速度可以达到设定值,此时PI调节器的输出很小,输出的力矩基本为恒定值。

图8 电机控制系统硬件调试平台

图9 采样电流后重构的V相、W相电流波形
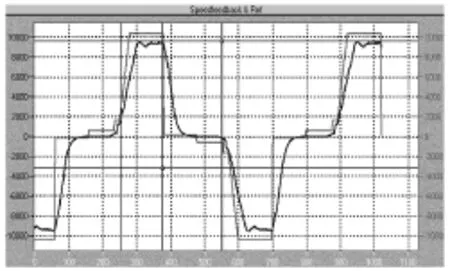
图10 速度设定和反馈曲线

图11 调节PI积分增以后的速度设定和速度反馈

图12 速度环PI输入输出波形
5 结论
本文分析了单电阻电流采样及相电流重构的方法,采用了IR公司的双核芯片IRMCF341作为主控芯片,实现了异步电机无位置传感器矢量控制。此方法淘汰了传统电动执行机构所必须的复杂的电机转向控制箱,简化了电机控制过程,大大节约了开发成本,具有较高的使用价值。
[1] 陈伯时. 电力拖动自动控制系统运动控制系统[M].北京: 机械工业出版社, 2003.
[2] 陈小波, 胡育文, 黄文新, 等. 基于单电阻电流采样的矢量控制算法研究[J]. 电气传动, 2011, 41(5):15-19.
[3] 孙兵成, 蓝维隆, 郭海亚. 简述无位置传感器PMSM 的新型控制方案设计[J]. 伺服控制, 2008,23(7): 27-30.
[4] Kim H, Jahns T M. Phase current Reconstruction for AC motor drivers using a DC Link single current sensor and measurement voltage vector[J]. IEEE Transactions on Power Electronics, 2006, 21(5): 1413-1419.
[5] 于落星, 张浩然. 基于 IRMCF341的无位置传感器电动汽车控制器设计[J]. 电子器件, 2010, 33(6):794-797.
[6] 邹驰, 李志俊. 一款高性能的电机控制芯片——IRMCF341[J]. 中国集成电路, 2005, 4(4): 61-64.
Research on Position Sensorless Asynchronous Motor Vector Control System
Wei Yufeng1Hu Wenbin2
(Automation College of Nanjing University of Science and Technology, Nanjing 210094)
Asynchronous motor is widely used in the field of frequency control of motor speed,because of its simple manufacture, high performance, small moment of inertia, high reliability advantages, and occupies a more and more important position in the national life. Based on the main motor control chip IRMCF341, a technique that makes the current sampling and reconstruction of the DC bus realized was analyzed in this paper. The sensorless control algorithm of asynchronous motor was completed, using the method of back electromotive force to estimate the motor rotor speed and position. Finally the debugging experimental of the whole control system was done, and the experimental results verify the correctness and feasibility of the sensorless vector control algorithm.
single shunt current sampling; Asynchronous motor; vector control
江苏省科技支撑计划项目(BE2013125)
江苏省产学研联合创新资金-前瞻性联合研究项目(BY2013004-01)
魏宇峰(1987-),男,江苏省徐州市人,南京理工大学硕士研究生,研究方向为异步电机及其控制技术。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
纺织科学研究(2020年1期)2020-05-21
制造技术与机床(2017年6期)2018-01-19
客车技术与研究(2015年3期)2015-08-24
舰船科学技术(2015年8期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01