
用于机器人轴孔装配的主-被动结合柔顺装置*
2016-10-25 03:33欧阳帆张铁陈杨
华南理工大学学报(自然科学版) 2016年7期
欧阳帆 张铁 陈杨
(1.华南理工大学 机械与汽车工程学院,广东 广州 510640; 2.中山市工业技术研究中心,广东 中山 528437)
用于机器人轴孔装配的主-被动结合柔顺装置*
欧阳帆1张铁1陈杨2
(1.华南理工大学 机械与汽车工程学院,广东 广州 510640; 2.中山市工业技术研究中心,广东 中山 528437)
对粗糙孔壁的机器人轴孔无卡阻装配的条件进行了分析,设计了一种基于磁场力的主动-被动结合的柔顺装置用于解决装配卡阻问题,其中被动柔顺部分采用磁场排斥力连接,在装配过程中使末端执行器与轴分离,大幅减小连接处阻力和阻力矩,然后通过旋转磁力推拉式主动柔顺装置产生的力矩使轴脱离卡阻点.使用带有开放式运动控制卡的三坐标运动平台加一维力传感器,对4组不同直径的轴孔对进行了实验,结果显示主动-被动结合柔顺装置能够有效克服粗糙孔壁轴孔对的卡阻问题,装配时间最快在10s内,证明所设计的柔顺装置和阻尼控制算法有效.
机器人;轴孔装配;被动柔顺;主动柔顺;阻尼控制
随着国内人工成本的上升以及制造业转型升级的需要,装配作业的自动化对于实现机器代人以及产业转型升级具有重要意义.在装配作业过程中,机器人与外界物体和环境发生接触,需要对接触力进行控制,一种方法是使用人工辅助远程操作技术[1-3],另一种方法是让机器人独立进行柔顺装配作业.
机器人独立装配作业需要机器人具备柔顺性.柔顺性的实现有两种方法:第一种是通过安装在操作臂末端的被动柔顺装置来实现,如Defazio等[4]提出的被动RCC(Remote Center of Compliance)装置、文献[5]中提出的层叠式金属橡胶片结构RCC以及文献[6]中提出的双层RCC等,包含弹性元件的RCC可以被动地容纳轴孔之间的位置和姿态误差;第二种是主动柔顺方法,分为两类,一类是直接主动柔顺方法,通过在末端执行器上安装力传感器,在机器人的控制伺服环中加入带有力反馈的主动柔顺算法纠正末端位置和姿态误差,一般使用6轴串联机器人或者并联机器人加6维力传感器平台[7-11],另一类是间接主动柔顺方法,在机器人末端安装可以进行主动对齐调整的装置,如在6轴串联工业机器人末端安装一个可以单独进行位姿调整的6轴精密并联平台[12],以及在机器人末端执行器安装被动RCC,在孔的底座安装沿孔的轴向频率和振幅可控的震动盘,依靠RCC被动柔顺性与振动盘的振动共同完成装配[13].
仅使用被动RCC进行轴孔装配存在局限性,如不同长度轴的装配,其需要不同的RCC,使得装配系统灵活性降低[12].带有力反馈控制的主动柔顺方法更能适应作业多样性和环境不确定性的需要.但是,一般的主动柔顺方法需要使用6轴机器人和6维力传感器[7-12],这样的系统价格昂贵;另外,6维力反馈控制算法需要根据六维力数据或者6维力数据加6维末端位姿数据建立复杂的接触状态识别地图[9-10],不同识别分类算法对接触状态识别的正确率差异很大[10],识别错误则很可能导致装配作业失败.此外,由于商业化6轴机器人一般不开放控制卡底层程序,在控制卡上加入力反馈控制算法难度很大,限制了其推广应用.而现有的振动盘方法只给出了实验研究结果,在满足特定频率、振幅和插入力的条件下,能够成功实现轴孔装配,但是缺少理论分析和证明,也没有总结出无卡阻方程[13].
另外,以上研究均是在孔壁光滑条件下的轴孔装配,对于孔壁粗糙的轴孔装配,更容易出现卡阻,实现成功装配作业更难.基于以上原因,文中使用成本低廉的三坐标运动平台加一维力传感器,使用开放式运动控制卡,针对粗糙孔壁的机器人轴孔装配,设计了一种主动-被动结合的柔顺装置用于解决装配卡阻问题,并通过实验对主-被动柔顺装置的轴孔装配效果进行了验证.
1 轴孔装配过程分析
装配作业时,轴与机器人末端执行器连接,孔固定在工作台上,末端执行器对轴施加的作用力一般使用一个包含三元素的力矢量F=[FxFzM]表示.如图1所示,假设机器人末端执行器具有x轴方向的线性刚度和扭转刚度,刚度系数分别为kx、kθ,Δx、Δθ分别为对应的线性位移和扭转角度,则末端执行器对轴施加的力Fx和力矩M可以由式(1)计算得到:
(1)
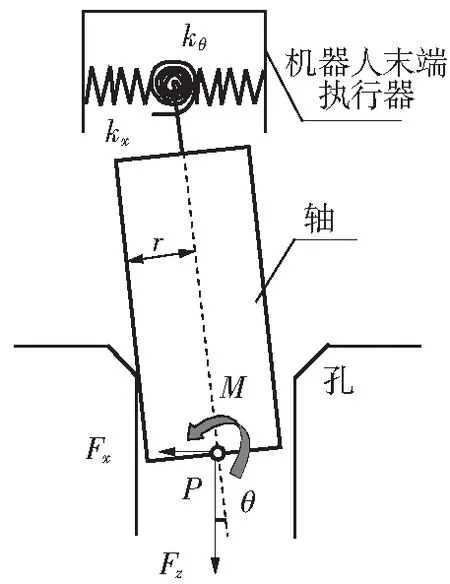
图1 机器人末端执行器刚度模型
图1中,Fz为装配过程中的轴插入力,r为轴横截面半径,θ为轴中心线与孔中心线所成初始夹角.为便于后续分析,将力矢量F的作用点设置在轴底端中心P上.轴孔装配存在卡阻和楔紧两种装配失败的情况[14-15],由于篇幅所限,文中只对卡阻问题进行研究.
1.1内壁光滑孔无卡阻条件分析
轴孔装配过程一般分为4个阶段:接近阶段、倒角阶段、一点接触阶段和两点接触阶段[14].本研究假设轴从孔正上方垂直向下接近孔,轴孔之间角度误差很小,由机器人定位精度保证轴在与孔接触时能够落在孔的倒角区域内,因此文中只研究4个阶段中的后3个阶段,3个阶段的受力分析如图2所示,其中,μ为准静态条件下的静摩擦系数,N为压力.
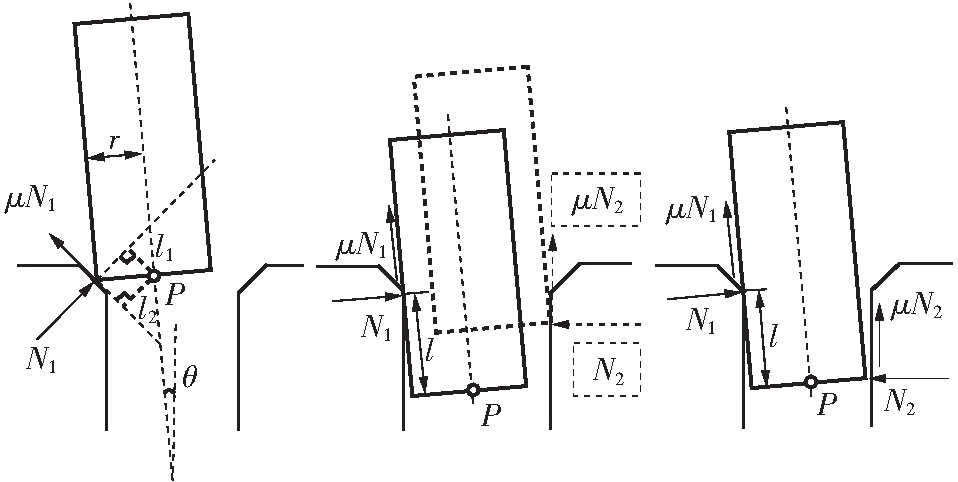
(a) 倒角阶段(b) 一点接触阶段(c) 两点接触阶段
图2倒角、一点接触、两点接触阶段受力分析
Fig.2Forceanalysisofchamfercrossing,one-pointandtwo-pointcontactstages
Whitney[14]对二维无倒角轴孔装配中4种形式的一点接触和2种形式的两点接触无卡阻条件进行了研究和总结,其中图2(b)和2(c)表示了6种形式中的3种,剩下的3种为与图2(b)和2(c)对称的轴从右边进入孔时的情形.在准静态条件下,假设忽略轴质量,Whitney总结了一点和两点接触阶段轴孔装配无卡阻需要满足的不等式条件通式:
(2)
分别对4种形式的一点接触和2种形式的两点接触使用式(2),可以得到每一种接触形式下装配无卡阻不等式条件式.
图2(b)和2(c)为一点和两点接触阶段,当轴从孔左侧进入的3种情形,可以得到图2(b)所示的一点接触阶段2种形式无卡阻条件:
(3)
(4)
图2(c)所示的两点接触阶段无卡阻条件为
(5)
类似地,当轴从孔右侧进入,即与图2(b)和2(c)对称的3种情形的无卡阻条件分别为
(6)
(7)
(8)
由式(3)-(8),可以总结出一点接触和两点接触无卡阻的条件,以式(9)表示.可以看出,一点接触是两点接触不等式中N1和N2分别等于0时的特殊情况.
(9)
其中,Fx=kxΔx,M=kθΔθ.
Whitney[14]提出的无卡阻不等式(式(2))是用于无倒角孔的轴孔装配,对于有倒角孔,还需要建立倒角阶段无卡阻不等式.如图2(a),设θ角逆时针方向旋转为正,倒角角度45°,则可以得到沿着45°倒角斜面的无卡阻不等式:
(10)
其中,N1=cos(π/4)(Fx+Fz),l1=rsin(π/4-θ),l2=rsin(π/4+θ).
类似地,当接触点在右边倒角区域时,即与图2(a)对称的情形,可以得到
(11)
其中,N1=cos(π/4)(Fz-Fx),l1=rsin(π/4+θ),l2=rsin(π/4-θ).
由式(10)、(11)可以得出沿着45°倒角斜面的无卡阻条件式为
(12)
其中,Fx=kxΔx,M=kθΔθ.
综上所述,不等式(9)和(12)分别为轴孔装配在孔内和倒角阶段无卡阻需要满足的力和力矩不等式条件,不等式左边为摩擦阻力μ|Fx|和阻力矩M,右边为轴插入力Fz和轴对中力矩,力不等式表示轴插入力Fz要大于摩擦阻力μ|Fx|,力矩不等式表示轴对中力矩要大于阻力矩M.实现无卡阻装配要同时满足这两个条件,第一种方法是增大插入力Fz和轴对中力矩,第二种方法是减小摩擦阻力μ|Fx|和阻力矩M,根据式(1),也即减小刚度系数kx和kθ.第二种方法通过设计和使用柔性更大的机器人末端执行器,有助于减小轴孔装配过程中的内力和摩擦力,文中使用第二种方法设计被动柔顺装置.
1.2内壁粗糙孔无卡阻条件分析
粗糙孔壁轴孔装配与光滑孔壁在一点和两点接触两个阶段有所不同.如图3所示,文中实验所使用孔的粗糙孔壁实际上是加工的刀痕,存在图4所示的两种卡阻,无卡阻装配条件在式(9)基础上修改为式(13).出现卡阻时,F阻实际上是轴的边缘落在加工刀痕上产生的反作用力,增大轴插入力Fz,反作用力F阻也相应增大.F阻属于阻力,也即不等式(9)左边的项增加,阻力和阻力矩均增大,因此相比光滑孔壁无卡阻条件更加苛刻,文中第3节主动柔顺装置设计的目的就在于解决这两种卡阻情况.
(13)
其中,Fx=kxΔx,M=kθΔθ.
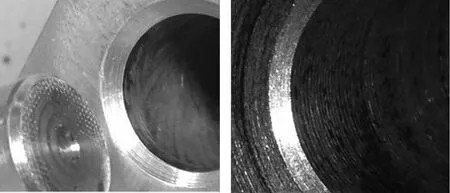
(a)光滑孔壁(b)粗糙孔壁
图3不同孔的内表面条件
Fig.3Internal surface roughness of different holes

图4 粗糙孔壁轴孔卡阻受力分析
2 基于磁场力的被动柔顺装置设计
根据1.1节分析结果,采用减小末端执行器刚度系数kx和kθ的方法能减小摩擦阻力μ|Fx|和阻力矩M,使装配过程满足无卡阻不等式(9)和(12)的力和力矩条件.根据最小化末端执行器kx和kθ的设计理念,本节设计了一种基于磁场力的被动柔顺装置.
如图5所示,在xz平面有沿x、z轴的2个移动自由度和1个平面旋转自由度.为分析方便,假设磁铁、连接机构和轴质量均为零,排斥磁场为匀强磁场.机器人末端执行器在z轴方向上的运动速度vz使用力反馈阻尼控制率进行控制,如式(14):
vz=k(Fz+Fm)
(14)
式中:Fm为力传感器检测到的沿z轴方向的力值,将轴与孔未接触时的值设为零点,负值代表压力方向,正值代表拉力方向;Fz为正值,Fz设定得越大则达到Fz时两相斥永磁体之间的距离越小,Fz的设定要足够大以保证在出现卡阻时轴能完全浮起,但是又不能过大,以保证轴浮起时两磁铁之间留下合适间隙;k为阻尼系数,为正值;vz为正值表示沿z轴正方向运动.
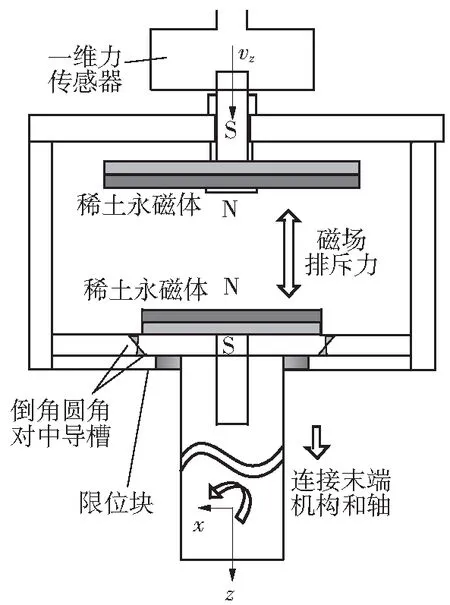
图5 被动柔顺装置结构图
图6标出的序号(1)、(2)、(3)表示装配过程的3个分解步骤.

图6 被动柔顺装置工作原理

第二步,由于轴沿z轴负方向升起后与机器人末端执行器分离,因此此时沿x轴移动自由度和平面旋转自由度均不受约束,在理想状态下可以认为此时线性刚度系数kx和扭转刚度系数kθ均为零,而沿z轴正方向仍然受到磁场排斥力作用.根据式(1),当kx=0时、kθ=0,可以得到Fx=0、M=0,然后将Fx、M代入不等式(9)和(12),不等式(9)和(12)小于号左边均等于零,也即阻力和阻力矩均等于零,而由于轴插入力∈(0,Fz],大于零;同时,只要轴与孔有接触,轴对中力矩也大于零,装配无卡阻条件必定满足,因此轴会继续向孔中运动.
第三步,轴向下运动直到被机器人末端执行器挡住,接触点在图中P2处,接触状态可能是单点、多点、线或面接触,此时轴运动停止,但根据力反馈阻尼控制率(式(14))末端执行器还是会继续向下运动.
之后,如果轴继续向下运动过程中在孔中受到阻力或者阻力矩则重复以上3个步骤,理想状态下轴在孔中阻力和阻力矩均等于零,轴会保持与机器人末端执行器在P2点接触一直到轴到达孔的底端,装配作业完成.
以上说明的装配3步骤是针对孔壁光滑的轴孔装配,然而,对于孔壁粗糙条件下的轴孔装配,如图4所示,根据1.2节分析结果,存在与光滑孔壁不同的两种卡阻情形,使用本节提出的基于磁场力的被动柔顺装置可以避免出现第一种一点接触卡阻的情形,原因是使用了本节的被动柔顺装置后,装配过程中轴与机器人末端执行器分离,第一种一点接触卡阻情形会自动转化为第二种两点接触卡阻情形.仅使用本节的被动柔顺装置不能解决粗糙孔壁条件下的二点接触卡阻,于是下文提出一种旋转推拉式主动柔顺装置,主被动柔顺装置结合使用来解决这个问题.
3 基于磁场力的旋转推拉式主动柔顺装置设计
仅使用第2节的被动柔顺装置不能解决粗糙孔壁条件下的二点接触卡阻,因此本节提出一种基于磁场力的旋转推拉式主动柔顺装置,通过主动-被动柔顺装置的结合解决这个问题.
主动柔顺装置设计如图7所示,在图5的基础上增加了一个圆形磁铁架,磁铁架圆周外部增加了一对永磁体,永磁体可以由电机带动内圈安装了滚珠轴承的同步带以恒定转速围绕圆形磁铁架旋转.图8是核心零件圆形磁铁架的结构示意图,磁极5对,这里为了保证圆周上相邻的磁铁极性相反,只能使用奇数对的磁极.由于圆形磁铁架圆周上异性磁极间隔分布,因此,当外部的一对磁铁围绕圆形磁铁架旋转时就会沿着过磁铁架中心的方向产生来回推-拉力,从而对磁铁架中心与轴连接的圆柱形连接件产生一个推力F推.
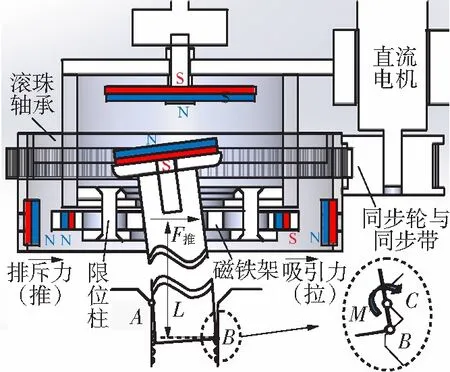
图7 旋转推拉式主动柔顺装置结构图

图8 圆形磁铁架的结构图
圆形磁铁架尺寸设计要求如下:
磁铁设计,磁铁架上空间十分有限,磁铁选高牌号稀土永磁体,外部一对永磁体可以通过增加厚度来增加推力F推.
中心孔设计,中心孔需要比中间与轴连接的圆柱形连接件直径大,留有一定空隙.
限位柱孔设计,孔的直径决定了磁铁架推拉运动行程,孔与限位柱之间间隙越大行程越大,为保证调整效果,行程要足够大,然后通过限位柱避免磁铁架与外部一对永磁体发生碰撞.
对于两点接触的卡阻问题可以由F推形成的杠杆作用来解除.如图7所示,A、B点为两个接触点,轴卡在了接触点B的刀痕上,F推形成的杠杆的旋转中心在刀痕的突起点C上,F推在点C形成了一个力臂为L的旋转力矩M′,由于L远大于BC线段长度,因此很小的F推即可以使轴脱离卡阻接触点B.之后轴在向下运动的过程中还有可能再出现卡在孔壁刀痕上的情况,由于电机一直在匀速旋转使磁铁架产生推拉运动,在孔壁圆周任意一个方向产生卡阻,可以由圆周上最近的一对有利于解除卡阻的“推-拉”磁极形成的杠杆作用来解除.
主动柔顺装置的控制实际上就是控制直流电机的起停,直流电机额定转速可以按照需要进行选购.控制直流电机开启的条件设置为力传感器信号检测到满足式(15):
Fm<-0.5Fz
(15)
此时,轴因为受到阻力而沿z轴负方向升起,与机器人末端执行器分离,说明出现了卡阻,开启电机使用主动柔顺装置来解除卡阻现象,完成装配.
4 实验
本节对第2、3节提出的被动和主动柔顺装置及控制算法进行实验验证.
4.1实验平台与设计


图9 实验平台说明图
最后实验时未按原设计将一维力传感器安装在柔顺装置顶端,而是与下方的轴夹持器连接在一起,原因是实验发现一维力传感器在受力为零的条件下,受到x、y轴力矩作用时读数也会发生变化,力矩产生于装置自身结构不对称以及装配过程中轴浮起后不在装置中心产生的偏心力矩.力矩产生的错误力信号对力反馈阻尼控制率(式(14))的控制效果影响很大,将其安装在下方则基本不受力矩信号的影响.
图10所示为实验使用的4对轴孔,右边是光滑轴孔对1,左边是粗糙轴孔对2、3、4,轴长度均为10cm,孔深度均为8cm,轴孔对详细参数如表1所示(表中的(0)、(1)、(2)表示轴或孔圆周上的倒角宽度).实验时,轴从孔的正上方1cm处开始接近孔,从孔倒角最边缘随机方向进入.

图10 实验使用的4对轴孔示意图
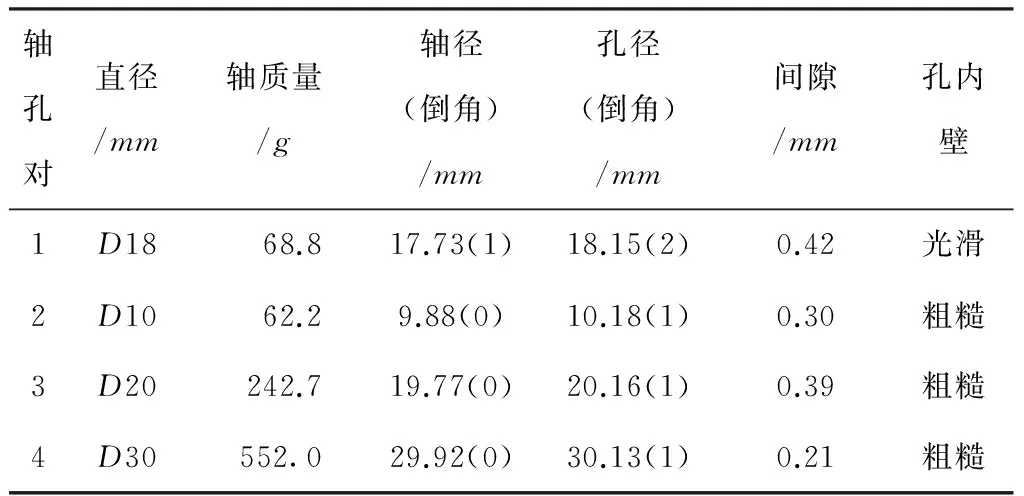
轴孔对直径/mm轴质量/g轴径(倒角)/mm孔径(倒角)/mm间隙/mm孔内壁1D1868.817.73(1)18.15(2)0.42光滑2D1062.29.88(0)10.18(1)0.30粗糙3D20242.719.77(0)20.16(1)0.39粗糙4D30552.029.92(0)30.13(1)0.21粗糙
实验中z轴轴向插入力使用一维力传感器和力反馈阻尼控制率(式(14))进行控制,主动柔顺装置电机启动判断条件使用式(15),6维力传感器仅用于检测装配过程中的受力情况.但是由于式(14)-(15)是假设轴和所有连接件质量为零的理想条件下的控制率,实际实验时需要考虑质量的影响,因此,设轴质量为m1,与轴连接的所有其他零件质量为m2,轴与孔未接触时的Fm设为零点.则式(14)-(15)需要修正为式(16)-(17),其中g为重力加速度.
力反馈阻尼控制率:
vz=k(Fz+(m1+m2)g+Fm)
(16)
电机启动条件:
Fm<-0.5Fz-(m1+m2)g
(17)
式(16)-(17)仅在式(14)-(15)中加入零件质量对应的重力项(m1+m2)g,其他变量与工作原理与式(14)-(15)一致.
经测量,设定Fz=3N时,出现卡阻时轴升起距离刚好在排斥磁场的中间位置,m2=840g,可以得到对于轴孔对1、2、3、4,根据式(16)当出现卡阻时vz=0,Fm值达到压力方向绝对值最大分别为-12、-12、-14、-17N.
4.2实验与结果分析
4.2.1被动柔顺装置轴孔装配实验
对被动柔顺装置的装配效果进行验证,对4组轴均进行10次实验,装配作业时间从轴孔在倒角区刚接触的时刻开始计算,到轴刚接触孔底的时刻结束,使用力反馈阻尼控制率式(16),阻尼系数k=0.175,装配结果和完成时间如表2所示.

表2 被动柔顺装置装配实验结果
从表2中看出,光滑壁孔轴孔对1由于摩擦系数小,轴孔间隙大,并且轴上也有倒角,相对来说实现无卡阻较容易,但是光滑孔壁轴孔对轴孔均有倒角,因此初始轴孔位置误差接近3mm,这么大的偏差下装配仍然无卡阻,证明被动柔顺装置对光滑孔壁无卡阻轴孔装配是有效的.粗糙孔壁轴孔对3也未出现卡阻,推测原因是因为轴孔间隙较大,并且3组粗糙轴孔对均只有孔有1mm倒角,因此最大偏差只能在1mm,偏差小加上间隙大,使轴孔对3也未出现卡阻.
4.2.2主被动柔顺结合的粗糙轴孔装配实验
对主动-被动结合柔顺装置的装配效果进行验证,对仅使用被动柔顺装置不能保证装配成功的轴孔对2和4分别进行实验20次,阻尼系数k=0.175.实验结果显示,轴孔对2和4平均完成时间分别为20.54和15.39s,20次实验均成功.
图11所示为轴孔对2其中一次出现卡阻情况下的力传感器Fm曲线,作业完成时间16.5s.
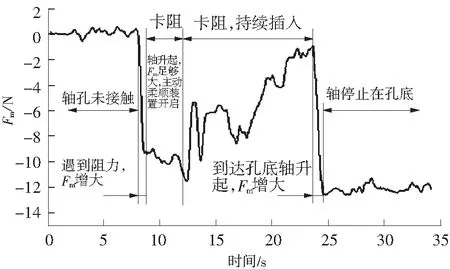
图11 出现卡阻情况下轴向力曲线
从图11中可以看出,轴孔接触以后,Fm迅速增大,出现卡阻,表明卡阻出现在倒角区域.当Fm增大到满足式(17)时,主动柔顺装置开启,卡阻解除,轴在重力和磁场排斥力作用下被推进孔中,之后Fm曲线在中间又出现反复,说明之后又出现了卡阻,在主动柔顺装置的作用下卡阻解除又继续向下运动,到达孔底之后根据力反馈阻尼控制率(式(16)),Fm达到压力方向绝对值最大-12N,运动速度为零,轴停留在孔底,此时轴在被动柔顺装置中保持升起状态,轴到达孔底保持ns之后,即满足式(17)ns之后,关闭主动柔顺装置,电机伺服关,装配完成,文中设置n=5.
从轴孔对2和4实验结果可看出,主动-被动结合柔顺装置能够有效解除粗糙孔壁轴孔对的卡阻问题.另外,6维力传感器数据显示,装配过程中Fx、Fy最大变化在2N左右,有所减小,Mx、My最大变化和4.2.1节实验一致,但是在轴到达孔底浮起后轴被主动柔顺装置来回推拉,由于此时轴孔结合在一起轴上力矩能很好地传递到孔底座的传感器上,Mx、My最大达到0.8N·m.
4.2.3阻尼系数k对装配时间的影响
为验证力反馈阻尼控制率式(16)中的阻尼系数k对装配完成时间的影响,分别取k=0.100,0.175,0.250,0.300进行了实验,表3中的装配完成时间为10次以上实验的平均时间.
表3不同阻尼系数装配完成时间表
Table3Timeofinsertionwithdifferentdampingcoefficient
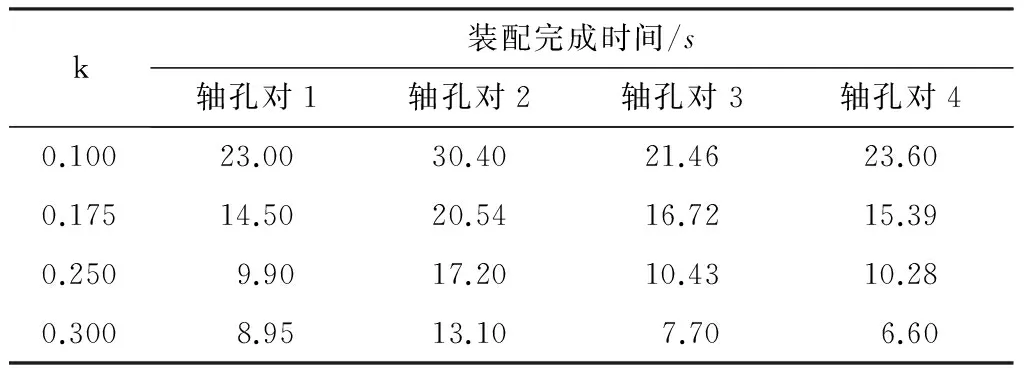
k装配完成时间/s轴孔对1轴孔对2轴孔对3轴孔对40.10023.0030.4021.4623.600.17514.5020.5416.7215.390.2509.9017.2010.4310.280.3008.9513.107.706.60
可以看出,阻尼系数k越大,平均装配完成时间越短,在不出现卡阻的前提下,阻尼控制系数k是影响装配完成时间的主要因素.其中轴孔对1和3仅使用被动柔顺,轴孔对2和4使用了主、被动柔顺.
5 结论
针对粗糙孔壁的机器人轴孔装配问题,设计了一种主、被动结合的柔顺装置,并进行了实验验证,得到以下结论.
(1)被动柔顺装置对于光滑孔壁以及间隙较大的粗糙孔壁无卡阻轴孔装配是有效的,xy平面装配内力小于5N,内力矩小于0.5N·m;主动-被动结合柔顺装置能够有效克服粗糙孔壁轴孔装配的卡阻问题,xy平面装配内力小于2N,内力矩小于0.8N·m,证明了所设计的装置和控制算法的有效性.
(2)力反馈阻尼控制率(式(16))中阻尼系数k是影响装配完成时间的主要因素.在不出现卡阻的前提下,阻尼系数k越大装配完成时间越短,最短时间小于10s.
(3)实验使用带有开放式运动控制卡的三坐标运动平台加一维力传感器,相比一般主动柔顺方法需要使用6轴机器人和6维力传感器,系统和控制算法简单,成本低,方便在工业中的实际应用.
[1]张丹,左敦稳,焦光明,等.面向虚拟装配操作的交互辅助技术 [J].华南理工大学学报(自然科学版),2010,38(5):127-132.
ZHANG Dan,ZUO Dun-wen,JIAO Guang-ming,et al.Interactive aid technology for virtual assembly manipulation [J].Journal of South China University of Technology(Natu-ral Science Edition),2010,38(5):127-132.
[2]AJOUDANI A,TSAGARAKIS N,BICCHI A.Tele-impe-dance:Teleoperation with impedance regulation using a body-machine interface [J].International Journal of Robotics Research,2012,31(13):1642-1655.
[3]李静蓉,苏杭朋,黄仲东,等.基于单点力反馈的机械产品虚拟装配阻力建模 [J].华南理工大学学报(自然科学版),2015,43(7):118-129.
LI Jing-rong,SU Hang-peng,HUANG Zhong-dong,et al.One-point force feedback modeling of resistance in virtual mechanical assembly process [J].Journal of South China University of Technology (Natural Science Edition),2015,43(7):118-129.
[4]DEFAZIO T L,SELTZER D S,WHITNEY D E.Instrumented remote center compliance [J].Industrial Robot,1984,11(4):238-242.
[5]SOUTHERN W R,LYONS C G.The study of a passive accommodation device in robotic insertion processes [J].Journal of Materials Processing Technology,2002,124:261-266.
[6]CHENG Chi-cheng,CHEN Gin-shan.A multiple RCC device for polygonal peg insertion [J].JSME International Journal,Series C:Mechanical Systems,Machine Elements and Manufacturing,2002,45(1):306-315.
[7]魏明明,傅卫平,蒋家婷,等.操作机器人轴孔装配的行为动力学控制策略 [J].机械工程学报,2015,51(5):14-21.
WEI Ming-ming,FU Wei-ping,JIANG Jia-ting,et al.Dynamics of behavior control strategy in peg-in-hole assembly task of manipulator [J].Journal of Mechanical Engineering,2015,51(5):14-21.
[8]CHEN H,WANG J,ZHANG G,et al.High-precision assembly automation based on robot compliance [J].International Journal of Advanced Manufacturing Technology,2009,45(9/10):999-1006.
[9]SHIRINZADEH B,ZHONG Y M,TILAKARATNA D W,et al.A hybrid contact state analysis methodology for robotic-based adjustment of cylindrical pair [J].International Journal of Advanced Manufacturing Technology,2011,52(1/2/3/4):329-342.
[10]JASIM I F,PLAPPER P W.Contact-state monitoring of force-guided robotic assembly tasks using expectation maximization-based Gaussian mixtures models [J].International Journal of Advanced Manufacturing Technology,2014,73(5/6/7/8):623-633.
[11]DIETRICH F,BUCHHOLZ D,WOBBE F,et al.On contact models for assembly tasks:Experimental investigation beyond the peg-in-hole problem on the example of force-torque maps [C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).Piscataway:IEEE Press,2010:2313-2318.
[12]LOPES A,ALMEIDA F.A force-impedance controlled industrial robot using an active robotic auxiliary device [J].Robotics and Computer-Integrated Manufacturing,2008,24:300-308.
[13]BAKSYS B,BASKUTIENE J,VEZYS J.Experimental research of vibratory alignment using passive compliance devices [J].Mechanika,2014,20(2):165-170.
[14]WHITNEY D E.Quasi-static assembly of compliantly supported rigid parts [J].Journal of Dynamic Systems,Measurement and Control,Transactions of the ASME,1982,104(1):65-77.
[15]夏妍春,殷跃红,盛鑫军,等.动态卡阻及主动柔顺装配策略研究 [J].高技术通讯,2004,14(7):63-68.
XIA Yan-chun,YIN Yue-hong,SHENG Xin-jun,et al.Dynamic jamming analysis and the strategy study on active compliance assembly [J].High Technology Letters,2004,14(7):63-68.
s: Supported by the China Postdoctoral Science Foundation(2014M562169), the PhD Start-up Fund of Natural Science Foundation of Guangdong Province(2015A030310261),the National Science and Technology Major Project of the Ministry of Science and Technology of China(zx04005006) and the Science and Technology Major Project of Guangdong Province(2014B090921004,2014B090920001,2015B010918002)
A Probe into Active-Passive Compliant Device for Robotic Peg-in-Hole Assembly
OUYANGFan1ZHANGTie1CHENYang2
(1. School of Mechanical and Automotive Engineering,South China University of Technology,Guangzhou 510640,Guangdong,China; 2. Zhongshan Industrial Technology Research Institute,Zhongshan 528437,Guangdong,China)
In this paper,the conditions for the jamming-free peg-in-hole assembly of holes with coarse internal surface are analyzed,and a magnetic force-based active-passive compliant device is designed to avoid the jamming. In this device,a passive compliant section connected by repulsive magnetic force is used to separate the shaft from the end-effector in the process of assembly. Thus,both resistance and resistance moment significantly decrease. After that,a rotational push-pull active compliant section connected by magnetic force is employed to generate a torque for the escape of shaft from jamming point. In addition,a three-axis motion platform with open-structured motion control card and a one-dimension force sensor are deployed to conduct experiments for four pairs of shaft and hole with different diameters. The results indicate that the designed active-passive compliant device can effectively avoid the jamming in the assembly process of holes with coarse internal surface,and that the assembly can be finished within 10 seconds,which means that the proposed device and the corresponding damping control algorithm are both effective.
robot; peg-in-hole assembly; passive compliance; active compliance; damping control
1000-565X(2016)07-0061-09
2015-12-07
中国博士后科学基金资助项目(2014M562169);广东省自然科学基金博士科研启动项目(2015A030310261);国家科技重大专项(zx04005006);广东省重大科技专项(2014B090921004,2014B090920001,2015B010918002)
欧阳帆(1986-),男,博士后,主要从事机器人柔顺装配方面的研究.E-mail:oooyyyfff@hotmail.com
TP 242doi: 10.3969/j.issn.1000-565X.2016.07.010
猜你喜欢
实验室研究与探索(2021年4期)2021-05-29
中外公路(2020年4期)2020-09-14
农业机械学报(2020年12期)2020-02-02
建材发展导向(2019年5期)2019-09-09
汽车实用技术(2019年8期)2019-05-10
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
山东工业技术(2016年15期)2016-12-01
科技创新导报(2016年6期)2016-05-14
橡塑技术与装备(2016年10期)2016-03-01
