激光-声联合探测中水表面声波检测方法进展
2016-10-25 08:47陈世哲张晓琳赵维杰张可可吴玉尚
海洋技术学报 2016年3期
陈世哲,张晓琳,王 波,赵维杰,张可可,赵 强,吴玉尚
(1.山东省科学院海洋仪器仪表研究所,山东 青岛 266001;2.哈尔滨工业大学 电气工程及自动化学院,黑龙江 哈尔滨 150001)
激光-声联合探测中水表面声波检测方法进展
陈世哲1,张晓琳2,王波1,赵维杰1,张可可1,赵强1,吴玉尚1
(1.山东省科学院海洋仪器仪表研究所,山东青岛266001;2.哈尔滨工业大学电气工程及自动化学院,黑龙江哈尔滨150001)
激光-声联合探测技术在空基-水下通信、水下目标探测及海洋环境检测等领域具有巨大的应用潜力,对于国家安全、资源勘探和海洋监测等具有重大意义。其中,水表面波检测技术是激光-声探测的关键技术。系统研究了水表面波检测技术中常用的激光衍射法、光通量法、激光多普勒测振法和激光干涉法等方法,系统阐述和分析了其技术原理、发展现状及存在的问题,结合我国当前的现状和迫切需求,给出了水表面波检测技术的发展趋势,对该技术的研究和发展具有很好的参考价值。
激光技术;水表面声波;水下通信;水下目标探测
随着我国“建设海洋强国”、“一带一路”战略的实施,海洋在我国经济发展、安全防御、能源开发等多个领域的作用越来越重要。激光—声联合探测技术是海洋环境下空基—水下通信、水下目标探测及海洋监测等领域的新兴技术,对我国新型高端海洋装备制造、深远海探测与安保等多个领域具有重要作用[1-2]。
激光—声联合探测技术是指由空基设备发射一束激光到空气—水界面上,通过检测水下声源引起的水表面的振动波形特征,进而获得水下声场特征信息的技术[3]。与传统的船载声纳技术相比,激光—声联合探测技术无需将探测器置于水中,减少了对信息交换场所的限制,可实现大区域水下目标快速探测[4]。同时,鉴于激光—声联合探测技术可实现空中设备与水下目标之间的实时、宽带远距离通信等方面的优势,一直是研究的热点。本文系统阐述了激光—声联合探测技术,并综合国内外的相关成果对其中的核心共性关键技术之一——水表面波检测,进行系统分析,给出其发展趋势,为我国在该领域的发展提供有效参考。
1 激光—声联合探测技术概述
早在1960年左右,美国海军利用蓝绿激光在清澈大洋中传播距离远的特性,曾对蓝绿激光探潜技术进行过大量的研究,不过在近岸的混浊海水中,其衰减仍然比较严重,探测深度大大减小,这极大地限制了其应用范围[5]。随着现代激光技术、声学与电子技术等交叉学科的发展,20世纪80年代提出利用激光—声探测水下目标的新技术。1988年,美国的M.s.Lee[6]首次提出激光在水表面受水表面波动强度调制的理论,并通过检测经水面位移幅度调制后的单模连续激光的反射光信号,成功检测到了引起水面振动的水下声信号。此后,该方法作为一种新兴的探测技术,日益受到国内外的普遍关注。
激光—声探测技术根据发射激光强度不同,大致可分为两种情况。一种情况是发射激光能量足够强,可以激发产生声波,从而实现对水下目标的探测;另一种情况是,用激光探测水表面声波,进而获取水下声场信息,从而实现水下设备的通信或水下目标的探测。该技术既克服了传统声纳检测必须将声纳置于水中的不足,又克服了蓝绿激光水下严重衰减的问题,是一种机动灵活、快速准确遥感探测新途径。
不过由于海上应用环境的复杂性,历经多年科研,虽已取得了一定的研究成果,但其距离实际应用仍需要相当的研究工作。作为水上与水下信息交换的关键环节,水表面波检测灵敏度和环境适应性的提高仍是研究的核心和难点。
2 水表面波检测方法现状
水表面声波探测方法是获取水下声源信息的关键和难点,目前大都处于基础理论和实验室研究阶段。1885年,英国物理学家Rayleigh[7]在研究地震波过程中首次将能量集中于固体或液体浅表层内传播的弹性波统称为表面声波,其特点是在介质浅表层内传播,其渗透深度约为一个波长,且随深度快速衰减。通常情况下,水下声源引起的水表面声波振动幅值大约为几十到几百纳米[8],而且应用环境是复杂水表面,给检测增加了相当的困难。水表面声波的测量与检测一直是表面波研究领域一个非常重要的课题,自20世纪60年代激光技术问世以后,更促进了水表面声波检测技术的发展[9]。
随着新技术的发展,主要检测方法有:激光衍射法、光通量法、激光多普勒测振法、激光干涉法等[10-11]。
2.1激光衍射法
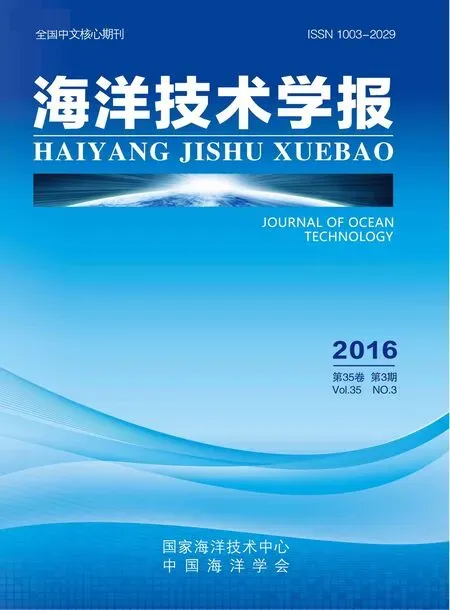
1979年,Weisbuck等[12]首次提出基于衍射的水表面声波光学检测方法,其基本原理是:当用激光束照射水表面时,表面声波对入射光而言可以看做一个衍射光栅,表面波频率越高,衍射角分辨越大。衍射图样分布满足光的衍射规律,这奠定了水表面声波激光衍射检测技术的理论基础。2006年,Behroozi[13]等针对几百赫兹的液体表面波,利用衍射光斑研究水波结构,但其实验设备昂贵,难以实现。
国内以陕西师范大学的曲润才教授为代表的学者从1996年以来对衍射法水表面波检测方法进行了持续的研究,在理论上导出了调制图样光强度、条纹角宽度与表面声波之间的解析关系[14]。

式中:Ir(φ)表示反射光强度;φ为衍射图样中某一衍射亮条纹到中央亮纹的角宽度;Λ为水表面波的波长;λ为光波波长;θ表示光的入射方向;θ-φ表示反射方向。
对于直接在液体表面激发产生的表面声波,和水下声源引起的表面声波,采用激光衍射法实验,得到了高反衬度的衍射图样,验证了该方法检测几十到几百赫兹液体表面声波的可行性[15-16]。
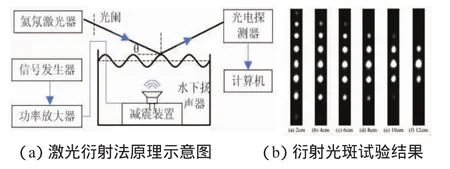
图1 激光衍射法原理示意图及衍射光斑试验结果
实验表明,随着水下声信号到激光光束入射点水平距离的变化,衍射条纹的宽度也会发生变化,即距离越大,衍射条纹的宽度越小。该方法具有实时、非接触、易于实现低频信号探测的特点。不过,其入射激光为斜入射,和接收光电探测器之间夹角过大,实际应用中的探测系统结构比较大(如图1中,观察屏距入射点的距离约为5 m),影响其应用的环境适应性。
2.2激光光通量法
光通量法始于1988年,Lee[2]在基于水表面声波探测识别水下声信号的研究中,建立了接收光瞳上接收强度调制效应的简单模型。其基本原理是:入射激光和光探测器位置固定,受接收器光瞳限制,从水面反射的光束仅有一部分进入探测器,而且包含了水表面波调整信息。光电探测器检测到得信号主要包含外界背景光产生的直流分量和水面波动引起接收光通量变化的交流部分。设幅度调制指数m为交流信号与直流信号的比值,则调制指数、声源频率以及水下声源引起水表面波动振幅之间的关系如式(2)所示。

式中:d为探测器到水面的距离;s0为声波的振幅;wa为声波频率;r为探测器的接收光瞳大小。
在此基础上,美国海军海洋研究发展中心(NORDA)成功研发了探测水下声信号的激光遥感方案,通过调制指数和声源频率计算水下声源引起水表面波动的振幅。
国内,2002年崔桂华、李荣福等[17]在Lee提出的光通量法的基础上,进一步解释进入光接收器光通量与水表面波的变化规律,设强度为I0的激光束聚焦到水面x1到x2处,接收端的光通量Ф(t)与水表面波动之间的关系式如式(3)所示。

式中:ψ(x)为包含水表面波信息的水面x处的反射率。如图2,在水槽中定量测定了激光检测水下声信号系统的检测性能。结果表明:激光检测系统的灵敏度普遍高于标准水听器的灵敏度,在800 Hz处,激光检测系统的灵敏度级最高,可达-153 dB。若按±3 dB计,激光检测系统的频响曲线平坦部分可到2 kHz,不过超出部分随频率增高,下降很快。
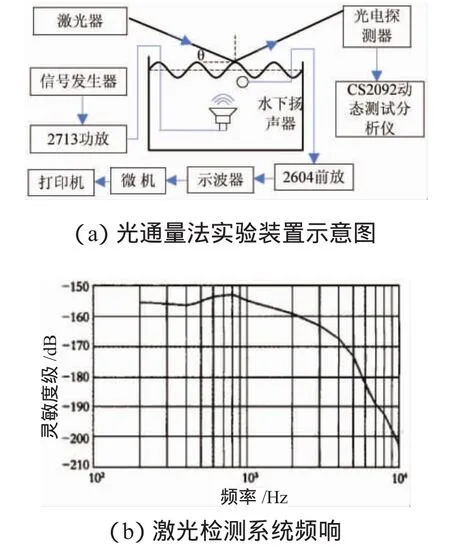
图2 光通量法实验装置及频响图
2007年,桂林电子科技大学的李翼瀚[18]、安徽师范大学的秦慧平[19]等对激光光通量法的模型进行了分析,通过统计接收到的光线的变化规律,通过运算得到水表面微波的频率特性,进而得到水下声信号的信息。并通过实验验证了该方法的正确性,但实验需要在平静水面上才能得到预想效果。
2009年,哈尔滨工程大学的方尔正教授等[20]提出利用激光通量变化测量水表面质点振动位移的方法,分析了水面微振动的物理过程及其表象的水声理论实质,并进行了水池试验。设计了基于激光直接强度调制法的激光声纳探测系统。
采取调制光源作为探测信号,采用光敏二极管面阵作为接收组件,提高系统的灵敏度和抗干扰能力。结果表明,对于400 Hz~3 kHz的信号,在水面平静甚至波动的情况下,能够测得水下声信号,从而证明利用激光探测水下声信号的可行性。
图3 激光直接强度调制法实验结构及试验结果
激光光通量法具有易于实现、结构简单、接收光强探测面积大、抗干扰能力较好等优点。不过,光通量法是建立在进入探测器单位面积上的光通量均匀相等的基础上,由于水波面的复杂形状,不同时刻反射光线进入探测器的方向是不同的,导致测量存在一定的误差;而且该方法基于光强探测,易于受外界环境的干扰,给探测带来一些误差。
2.3激光多普勒测振法
1999-2005年,Antonelli等[21-22]利用激光多普勒测振方法对水表面波探测水下声场进行了系列研究。首先设计一套可以模拟水流和空气流的水池试验系统,利用商用激光多普勒测振计实现水表面波的测试,通过对静态水面和3种不同动态水面进行测试,表明在2~50 kHz,静态水面条件下时能够测得的信号最小声压级为119 dB/μPa,证明该技术的可行性。随后,针对探测光束的垂直入射和反射问题,在原有试验系统上安装反射光跟踪系统,以实现微动水面上的测试。结果表明,跟踪捕获装置可以自适应调节激光发射角度,从而保持光束能够始终垂直入射水表面,解决了因振动表面倾角过大造成的光信号丢失问题。而且该反射光跟踪系统能够实现不同位置的单点探测,降低了扫描系统的复杂度,减少了光学扫描的数据量和时间,使探测系统的性能进一步提高,在静态水面环境下40~60 kHz范围内激光所能测得的最大表面声压级为156 dB/μPa。
2005-2006年,Blackmon等[23]进一步推进了基于激光多普勒的光声—声光双向通信技术。下行通信,使用高能量脉冲激光经光声转换产生水下声信号,非线性光声转换部分可以实现小于178 dB的声压级;上行通信,探测振动水面的多普勒频率进而推导获得水下声压级;通信过程中,在静态水面环境下,光声—声光双向通信系统的无误码数据传输率为6 000 bit/s。在模拟产生0.3 m/s水流和2.58 m/s空气流的动态水面环境下,光声—声光双向通信系统的无误码数据传输率降为900 bit/s。
激光多普勒测量具有体积小、测量精度高和结构简单等特点,但反射面的性质、激光束会聚点因振动而离焦物体表面、散射激光束的强度分布、被测物体的表面效应、反射光的瞬时消失等都对测量结果产生影响。
2.4激光干涉法
2006年,Cray[24]等提出采用迈克耳逊干涉仪振动测量系统提高检测灵敏度的方法。随后的研究者对其又进行了完善和提高,重点发展了基于分立元件的激光干涉法和基于光纤的激光干涉法。激光干涉法的基本原理是,假定水下有一振动频率为fs的声源,其发声时在水表面引起的水表面波用式(4)表示:

式中:As,fs,φs分别为由电水下声源引起的水表面的振幅、频率和相位。
用激光照射波动的水面,则散射光中携带了水表面声波信息,它与参考光干涉,干涉光强信息用式(5)表示:

式中:I1,I2为两相干光的光强;λ为光波波长,(L1-L2)为水面静止时水面散射光与参考光的初始光程差。干涉光用光电探测器接收,得到交流光电信号U,对其进行解调可得到水表面波的频率fs;对获得的交流光电信号U进行傅里叶频谱变换,根据水表面波散射光发生的多普勒频移可获得液体表面波的振幅As。
2.4.1基于分立元件的激光干涉法2010年,哈尔滨工业大学的张晓琳等[25-26]进行了基于激光干涉的水表面声波探测技术的研究。设计的试验结构如图4(a)示,氦氖激光器发出的光经过1/4波片后成为圆偏振光,再经过半反半透镜后分为两束,一束向下作为参考光,另一束经反射镜1后射向水面,经水面反射后,携带了水下声信号的水面散射光经过望远系统后,通过半反半透镜BS后与参考光束会合,发生干涉现象。相干信号经过傅里叶变换后,得到频谱分析图,从而解调出水下声信号频率。衰减片的作用是使得参考光强变弱,以便得到较好的干涉效果。滤波片的作用是去除环境杂光的干扰。试验结果表明该种方式可以有效检测到几百赫兹到几十千赫兹的水下声源信号。
用分立光学器件搭建激光干涉测量系统,易于实现,观测精度也比较高,不足之处是实验系统比较庞大,而且水面散射光非常微弱,干涉效果易受外界环境光、振动等干扰,通过进一步的光学系统及实验环境改善等可以进一步提高其检测精度。

图4 基于分立元件的激光干涉法实验系统结构图及实验结果
2.4.2基于光纤的激光干涉法随着光纤传感技术的发展,鉴于光纤体积小、重量轻、光路内部抗干扰能力强等优点,针对传统分立元件光路设计中光路调节难度大、易受外界环境因素干扰等缺点,很多学者又发展了基于光纤的激光干涉水表面波检测方法,代表性的有烟台大学的全光纤光路设计的激光探测水下声信号的实验研究[27]和中科院的基于光纤激光多普勒测振的水表面波检测研究[28-30],验证了基于光纤的激光干涉水表面波检测的可行性。
2007-2009年,中科院上海光学精密研究所和中科院声学所的学者通过对多普勒相干检测方法的研究,开发了一套激光测报系统,通过对水面质点振动速度进行非侵入式探测,进而获取水下声信息。系统结构如图5示。系统采用外差工作模式,收发同轴,激光器采用分布反馈光纤激光器,射出窄线宽1 550 nm激光,最大输出功率100 MW。输出激光入射到一个1×2可变光纤耦合器,其中一路激光作为本振光,另一路输出经过声光移频器移频55 MHz后进入光纤环行器,由光纤环行器经望远镜聚焦于水表面。返回信号光由相同的望远镜和光纤环行器接收。由于激光发射和接收采用同一光路,不仅光路简单、易于调节,而且光学耦合效率高。光纤环行器输出的回波信号与本振光进入3 dB光纤耦合器,由平衡光电探测器检测相干信号,消除直流漂移,再经过正交信号处理后,获得水面振动多普勒频移的同相合正交分量,借助于高速数字化仪器,将两个正交波形数字化,获取数据后通过鉴频器即可恢复水下声信号。
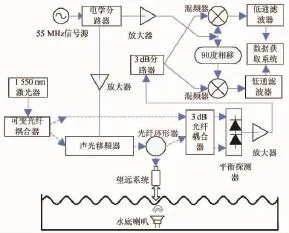
图5 基于光纤的干涉法实验系统结构图
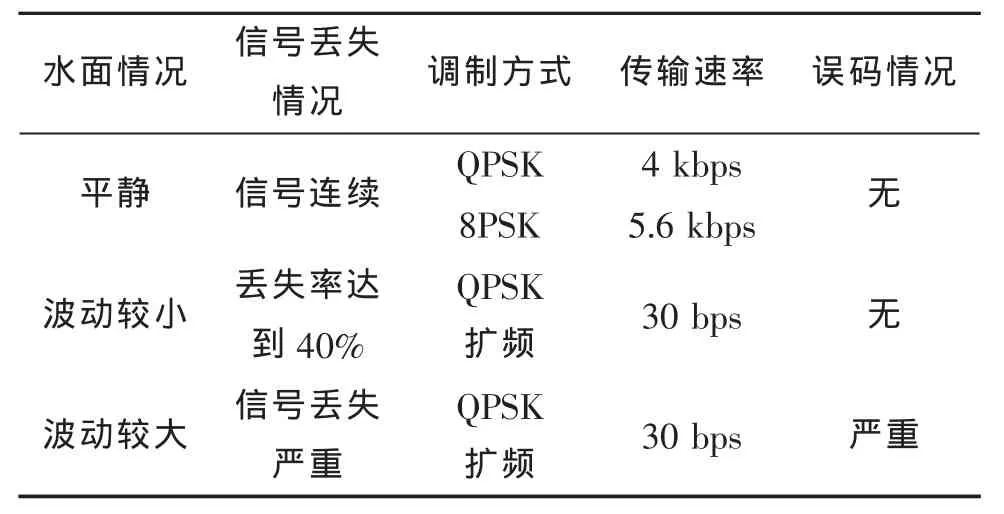
表1 光纤激光干涉法实验结果
通过在中科院声学所水池进行的试验验证了多普勒相干激光检测水下声信息的可行性,水下声源至于水下1.7 m,由表1,在水面平静时,可以使用高效率的相干通信技术,接收端采用嵌入二阶数字锁相环的分数间隔判决反馈均衡器进行解码,数据传输率高达5.6 kbps,基本无误码;而在水面波动时,由于反射激光抖动,导致了数据的丢失,数据传输率降低,最大为30 bps,且当水面波动较大时,误码严重。说明激光—声通信在实际应用环境中的困难,也反映出,该技术研究的方向是进一步解决其在实际应用中的环境适应性和灵敏度问题。
该系统采用全光纤结构,便于系统集成。激光发射和接收采用同光轴收发,并利用光纤环行器分离发射和接收光路,光路简单可靠。采用外差检测,提高了光电信号的信噪比,增强了信号的抗干扰能力。不足之处是,光纤激光器光源发射功率较低,从激光器到探测水面长距离探测光信号较弱,易受外界杂散光干扰。
2.5几种方法的比较
激光衍射检测技术发展较早,能够探测几十到几百赫兹的表面声波,它的限制条件是表面声波的频率不能低于衍射条件。用该方法检测水下声源引起的水表面波动,要求在水下声源不发声时保持水面的静止,这在水下声信号的实际探测中很难实现。光通量法最为直接地证明了水下声场的存在,因此国内外学者始终致力于这方面的研究,并不断取得新进展。但由于它是基于水表面声波对激光光强的调制作用,因此易于受到水面的自然波动、外界杂散光的影响。激光多普勒测振法可以将高精度的激光多普勒测量和自适应跟踪调节装置相结合,提高测量的准确度和环境适应性,实际试验也证明了其优越性,不过它也存在易受反射面性质影响的不足。激光干涉法是近期发展起来的基于通用的迈克耳逊干涉原理的水面波检测方法,具有精度高、结构紧凑等优点,但是由于形成干涉的测量光是水表面的散射光,光强与参考光差别很大,给测量造成一定的困难。各种方法的比较如表2所示,探测频率范围是参考文献给出的代表性试验的频率范围。

表2 几种探测方法比较
3 发展与展望
综上,国内外对水表面声波探测技术的研究尚处于基础理论和实验室研究阶段。目前国外在静态水面环境下,光声—声光双向通信系统的无误码数据传输率实验可达6 kbps;我国中科院声学所水池试验水面平静时数据传输率高达5.6 kbps,但是两者在水面波动时,数据传输率大幅降低。水表面声波探测由于信号非常微弱(水面声波振幅大约几十到几百纳米),而且实际海面非常复杂,灵敏度提高及环境适应性方面需要大力提高,未来的发展趋势主要表现在如下几方面:
(1)受海面复杂环境的影响,激光—声探测技术发展的瓶颈仍然是复杂海况下探测的灵敏度和实用性,仍然是国际上研究的热点和难点问题。
(2)对于由水面波动引起的光信号丢失问题,目前的解决方案是设计具有自适应跟踪性能的系统帮助捕捉信号光,这可以在自适应跟踪模型、自动控制理论和机电系统小型化等方面做进一步研究,以提高其自动跟踪性能,以及优化系统结构。
(3)目前的主要检测方法各有其优缺点,单一的一种方法很难满足环境适应性,下一步可以通过多种检测方法互相结合、互相补偿、检测数据的融合等方法提高水表面波检测的灵敏度和环境适应性。
(4)为进一步提高检测方法的环境适应性,可以一种或多种检测方法组网布阵扩大检测的范围,通过海气界面、水下环境对信号的干扰研究,提高检测准确度。
水表面波检测是激光声探测的关键,随着激光技术、电子信息技术和自动控制技术的发展,必将推动水表面波检测技术向更高灵敏度和更高环境适应性方向发展。
[1]宗思光,王江安,马明奎.水下目标探测的激光声特性[J].中国激光,2010,37(5):1332-1337.
[2]彭小东.面向光声海底地形探测的声学信号建模与处理技术[D].杭州:浙江大学,2014.
[3]李荣福,崔桂华.激光声遥感技术[M].北京:国防工业出版社,2003.
[4]叶佳木.基于宽带激光声源的水下目标估计[D].杭州:浙江大学,2015.
[5]尹晓东,刘清宇,徐江.国外航空声学探潜装备研究进展[J].舰船科学技术,2008,30(6):172-175.
[6]M S Lee,B S Bourgeois,Hsieh S T,et al.A Laser Sensing Scheme for Detection of Underwater Acoustic Signals[C]//Conference Proceedings 1998 IEEE South Knoxville,USA,1988:253-257.
[7]Hirao M,Fukuoka H,Horik.Acousto-Elastic Effect of Rayleigh Wave in Isotropic Material[J].Journal of Applied Mechanics,1981,48(3):119-124.
[8]张晓琳.基于激光干涉的水表面声波探测技术研究[D].哈尔滨:哈尔滨工业大学,2010.
[9]张亚妮,苗润才.表面声波的激光检测技术[J]激光杂志,2006,27(2):6-8.
[10]张爽,张晓晖,孙春生.计算海面激光反射特性的几何光学方法研究[J].光学与光电技术,2012,10(3):28-31.
[11]苗润才,许佳婷,谢甜.低频水下声信号的激光探测[J].应用光学,2012,33(5):974-978.
[12]Weisbuch G,GarrbayF.Light ScatteringbySurface Tension Waves[J].AmJPhys,1979,47:355-356.
[13]Behroozi F,Perkins A.Direct Measurement of the Dispersion Relation of Capillary Waves by Laser Interferomtry[J].Am J Phys,2006,74:957.
[14]许佳婷.低频水下声源的激光探测研究[D].陕西:陕西师范大学,2012.
[15]苗润才,刘香莲,罗道斌.激光衍射法测量表面波的衰减系数与频率的关系[J].激光技术,2007,28(6):20-21.
[16]苗润才,王玉明,孟峰,等.水下低频声信号的激光探测及波的衰减[J].光子学报,2013,42(4):432-436.
[17]崔桂华,李荣福,田作喜.激光遥感探测水下声信号的研究[J].船舰科学技术,2002,24(1):46-50.
[18]李翼瀚,周田华,张德琨.水下声信号红外激光探测的光线分析[J].红外,2007,28(5):1-5.
[19]秦慧平,黄时中,丁绪星.激光探测水下声信息的计算与分析[J].安徽师范大学学报:自然科学版,2007,30(4):451-454.
[20]陈洁.激光探测水下目标方法研究[D].哈尔滨:哈尔滨工程大学,2009.
[21]Antonelli Lynn T,Kenneth MWalsh,AndrewAlberg.Laser Interrogation ofAir-Water Interface for In-Water Sound Detection Initial FeasibilityTests[J].J Acoust Soc Am,1999,106(4):2298.
[22]Antonelli Lynn T,Fletcher Blackmon,Lewis Meier III.Acousto-Optic Localization Using A Dynamic,Spatio-Temporal Array[C]//OCEANS,Proc.MTS/IEEE,2005,1:1-8.
[23]Fletcher A Blackmon,Lynn T Antonelli.Experimental Detection and Reception Performance for Uplink Underwater Acoustic Communication Usinga Remote,In-Air,Acousto-Optic Sensor[J].IEEE J Ocean Eng,2006,31(1):179-187.
[24]Benjamin A Cray,Stephen E Forsythe,Andrew J Hulletal.A Scanning Laser Doppler Vibrometer Acoustic Array[J].J Acoust Soc Am,2006,120(1):164-170.
[25]张晓琳,唐文彦,马强.激光空中探测水下目标的新方法研究[J].激光与红外,2009,39(8):817-820.
[26]张晓琳,唐文彦,孙和义.基于干涉信号频谱分析的水下目标探测[J].仪器仪表学报,2010,31(8):22-25.
[27]曹增辉,郑田甜,孙腾飞,等.激光探测水下声信号的实验研究[J].光电技术应用,2014,29(2):17-21.
[28]贺岩,王文奎,夏文兵,等.激光多普勒振动计用于水下声光通信[J].中国激光,2007,34(5):703-706.
[29]尚建华,贺岩,臧华国,等.新型声光通信激光多普勒信号的鉴频电路[J].中国激光,2008,35(1):92-96.
[30]贾宁,贺岩,马力,等.激光—声通信研究[J].应用声学,2009,28(4):259-267.
Review on the Progress of Water Surface Acoustic Wave Inspection for the Laser-Acoustic Detection Technique
CHEN Shi-zhe1,ZHANG Xiao-lin2,WANG Bo1,ZHAO Wei-jie1,ZHANG Ke-ke1,ZHAO Qiang1,WU Yu-shang1
1.Institute of Oceanographic Instrumentation,Shandong Academy of Sciences,Qingdao 266001,Shandong Province,China;
2.School of Electrical Engineering&Automation,Harbin Institute of Technology,Harbin 150001,Heilongjiang Province,China
Laser-acoustic detection is a new technique with great potential for air-based and underwater communication,underwater target detection and marine environmental monitoring,which has considerable significance for China's national security,resources exploration and marine monitoring.Water surface acoustic wave inspection is one of the key techniques for laser-acoustic detection.After reviewing the history and current situation of water surface acoustic wave inspection,the major methods have been thoroughly analyzed,such as laser diffraction,laser luminous flux,laser Doppler vibration measurement and laser interference.Combined with China's technical status and pressing demand,the development trend of water surface acoustic wave inspection is presented in this paper,providing reference for the research and development of this technique.
laser technique;water surface acoustic wave;underwater communication;underwater target detection
TB561
A
1003-2029(2016)03-0001-07
10.3969/j.issn.1003-2029.2016.03.001
2015-09-24
山东省自然科学基金资助项目(ZR2013DM013,ZR2012DL14);国家自然科学基金资助项目(61201097,61405106);山东省攀登计划资助项目
陈世哲(1975-),男,博士,研究员,主要从事光电信息检测技术、海洋浮标监测技术等方面的研究。E-mail:chenshizhe1975@163.com
猜你喜欢
传感器世界(2022年4期)2022-11-24
电子测试(2022年5期)2022-03-17
科学技术创新(2021年36期)2022-01-18
课外生活(小学1-3年级)(2020年2期)2020-03-09
电子制作(2018年23期)2018-12-26
中国宝玉石(2018年3期)2018-07-09
小猕猴智力画刊(2017年6期)2017-07-03
西南石油大学学报(自然科学版)(2016年2期)2016-12-01
能源(2016年3期)2016-12-01
滇池(2014年5期)2014-05-29