侧扫声纳图像地理编码方法研究
2016-10-25 08:47胡迺成
海洋技术学报 2016年3期
成 芳,胡迺成
(中国人民解放军91439部队,辽宁 大连116041)
侧扫声纳图像地理编码方法研究
成 芳,胡迺成
(中国人民解放军91439部队,辽宁 大连116041)
从侧扫声纳各类数据的特点出发,通过构建声纳图像的地理编码模型,提出侧扫声纳图像地理编码方法,将声纳回波数据与定位数据一一对应。实验数据结果表明:该方法是合理可行的,不仅较好地处理了定位数据,消除了拖鱼轨迹线上的折点和扇形裂缝,而且可实现海底回波点的地理定位。
侧扫声纳;数据后处理;地理编码;高斯坐标;Bezier函数;目标探测
侧扫声纳是实现海底全覆盖扫测的重要水声设备之一,由甲板单元、数据采集显示软件、拖鱼和拖曳线缆组成。其通过与定位系统(如GPS)连接,可获得侧扫声纳各采样点的地理位置,为海底探测提供了完整的海底声学图像。近年来,侧扫声纳被广泛应用于海底地貌测绘、海底底质结构探测、航道疏浚、水下目标搜寻等方面。
随着侧扫声纳技术的不断发展,国外已出现了自动化程度较高的侧扫声纳数据处理软件[1-6],然而,即便这些软件伴随侧扫声纳硬件系统一并提供,其软件算法仍是保密的,对于用户来讲就是个“黑盒子”。事实上,一套完整的侧扫声纳数据处理软件主要包括数据预处理(格式解析、粗差剔除、数据平滑滤波、辅助参数计算等)、声图形成及拼接、回波点地理编码、失真改正、声图去噪、声图目标边缘提取等功能。本文针对回波点地理编码这一功能,研究侧扫声纳与定位系统联合使用问题,探讨侧扫声纳海底目标物的定位机制,通过建立声纳图像的地理编码模型,提出侧扫声纳图像地理编码方法,最终实现声纳图像的地理坐标定位,为今后研发国家自主知识产权的侧扫声纳数据处理软件提供理论参考和技术支持。
1 声纳图像地理编码方法
1.1定位数据处理方法
1.1.1理论基础从现有的定位系统来看,其采样率明显低于侧扫声纳回波采样率[7-14]。因此,在进行声纳图像地理编码前,应先对定位数据进行处理,使定位数据与回波数据一一对应,消除图像中的空白和重叠区域,使侧扫声纳图像显示完整。
提出基于三次样条函数(Bezier函数)的处理方法,具体方法如下:
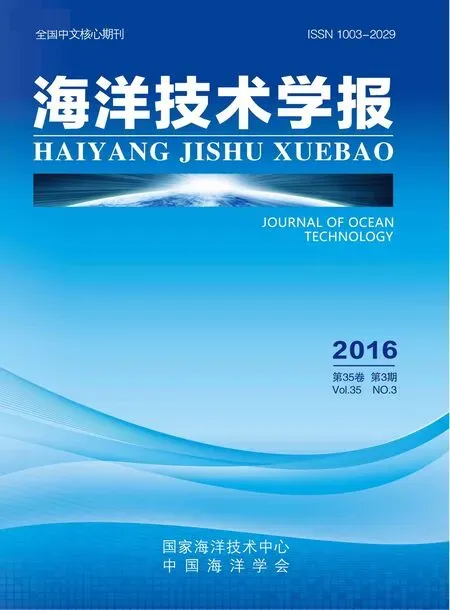
设 Ti,Ti+1为定位系统中两个相邻点位 Pi(yi,xi),Pi+1(yi+1,xi+1)处的记录时间,通过将Ti,Ti+1与扫描线更新时间比较,可确定出Ti~Ti+1时间内,拖鱼接收到的扫描线数量n,如图1所示:
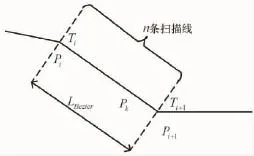
图1 Ti~Ti+1时间内,拖鱼接收的Ping线数量
设LBezier为Ti~Ti+1时间内拖鱼航行距离,则第k条扫描线对应的航迹点Pk(yk,xk)距Pi(yi,xi)的距离如式(1)所示:

设过Pi(yi,xi),Pi+1(yi+1,xi+1)的航迹函数为x=fBezier(y),则Ti~Ti+1时间内拖鱼航行距离可用式(2)表示:

设Fbezier(y)为的原函数,则利用式(1)和式(2)可解算出拖鱼接收第k条扫描线时的地理坐标Pk(yk,xk),如式(3)所示:
声纳图像中消除航迹不稳造成的扇形裂缝,其效果见图2。
图2 航迹三次样条函数处理后的效果
1.1.2算例分析选取某海域原始侧扫声纳数据作为实验数据,该数据由EdgeTech 4200-FS型侧扫声纳[2]测量获得。在该测线进行测量时,发射脉冲中心频率为403 kHz,发射脉冲宽度为3 ms,量程为75 m,数据采样间隔为0.015 6 ms。
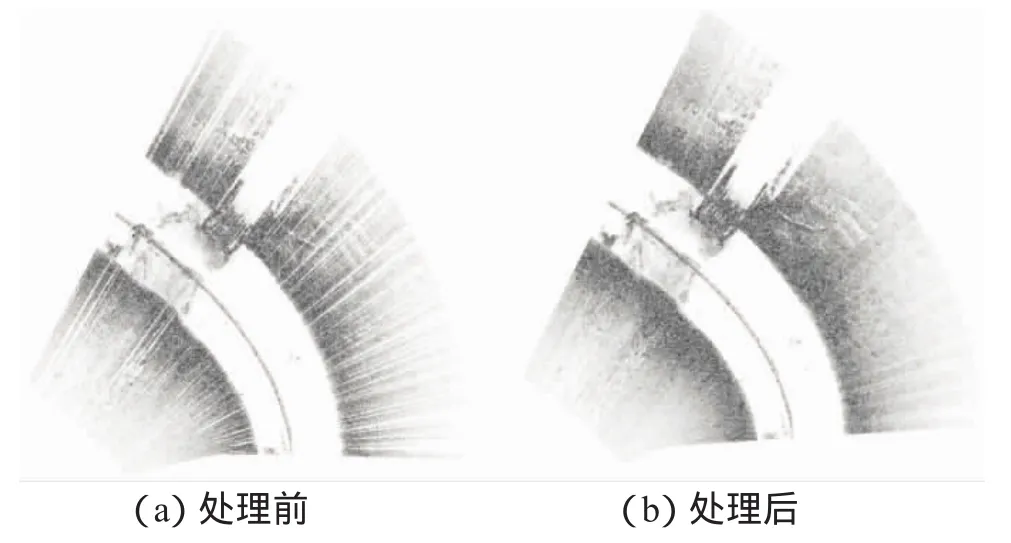
图3 定位数据处理前后效果对比图
通过对侧扫声纳回波数据和定位数据的读取发现:
(1)回波数据采样率为定位数据采样率的5倍;
(2)未经航迹数据处理的声纳图像(如图3(a)),由于声纳系统扫描与定位不同步,使得相邻扫描线具有相同的导航信息,特征点数量远少于扫描线数量,因此,在像素重采样过程中,容易造成相邻多条扫描线互相重合,在航迹特征点之间形成扇带裂缝;而通过三次Bezier曲线处理后的声纳图像(如图3(b)),成像效果较好,尤其在扇形裂缝比较集中的航迹拐点处,声纳图像平滑,有效消除了扇形裂缝。
1.2地理编码方法
定位数据进行处理后,将侧扫声纳回波数据纳入指定的坐标系的方法即为地理编码方法。本文通过建立地理编码模型,尝试提出地理编码方法,并通过基于C#语言编制的地理编码显示软件验证地理编码的可行性。
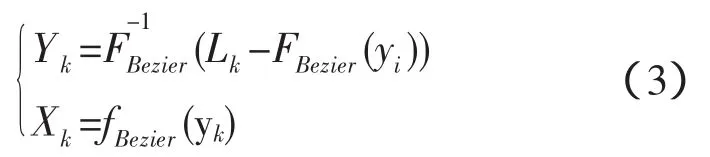
1.2.1地理编码模型如图4所示,在高斯平面直角坐标系中,A,B为航迹线上相邻两条扫描线对应的航迹点,设其坐标分别为(y1,x1)和(y2,x2),α为航迹线与横轴所夹锐角,直线AB的斜率为(y2-y1)。设扫描线某回波点R1的坐标为(y,x),则每条扫描线上回波点相对于侧扫声纳航迹线上定位点的相对位置为:
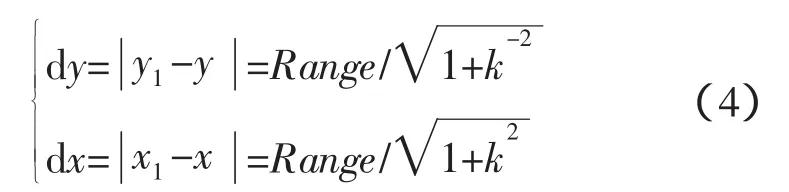

图4 Ping线上回波点坐标计算示意图
按照左右舷的不同,根据侧扫声纳航迹线上每一定位点切线的斜率,利用确定的航迹线定位点,由解析数据和内插数据推算出声回波点的定位点,并代入高斯平面直角坐标系中,由此可得到侧扫声纳扫描探测海域的海底地形上所有点的高斯坐标(归算结果见表1)。至此,完成了地理编码模型的构建。
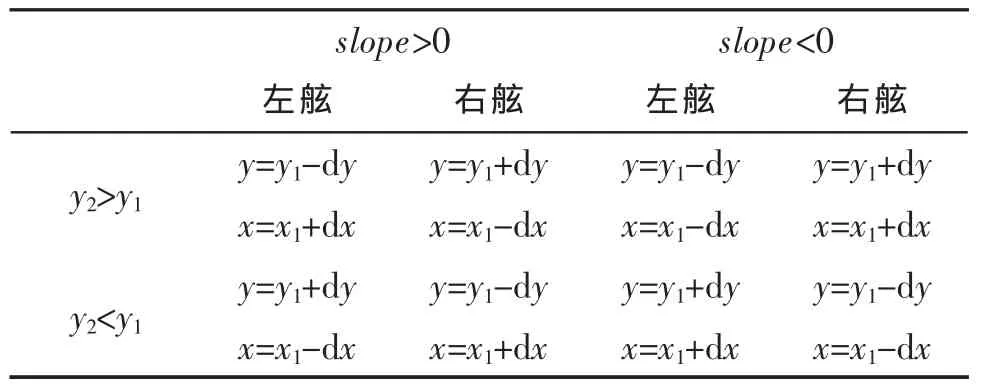
表1 扫描线回波点计算公式分析表
1.2.2地理编码方法通过上一节地理编码模型的建立,本文认为侧扫声纳图像地理编码的具体方法如图5的流程所示。
将侧扫声纳原始数据按相应数据格式进行解析[15],分离出扫描线的序号、拖鱼航迹坐标经纬度、拖鱼采样数、拖鱼采样间隔以及扫描线上每点的声回波幅值,将分离出的拖鱼航迹坐标经纬度转换为高斯平面地理坐标,并通过平滑处理,消除航迹转弯处可能出现的扫描线间距裂缝,计算每条扫描线上的声回波点与侧扫声纳航迹线上定位点的相对位置,确定其高斯地理坐标(YE,XN),经过高斯地理坐标的反变换,最终得到各回波点该目标物的经纬度坐标(L,B)。

图5 侧扫声纳图像地理编码方法
2 算例分析
通过编制基于C#的侧扫声纳地理编码显示软件,验证侧扫声纳图像地理编码方法的可行性。
选取某海域原始侧扫声纳数据作为实验数据,该数据由EdgeTech 4200-MP型侧扫声纳和HV110 GPS罗经联合测量获得。其中,侧扫声纳发射脉冲中心频率为403 kHz,发射脉冲宽度为10 ms,量程为75 m。根据上节提出的侧扫声纳图像地理编码方法完成回波点地理定位(如图6)。
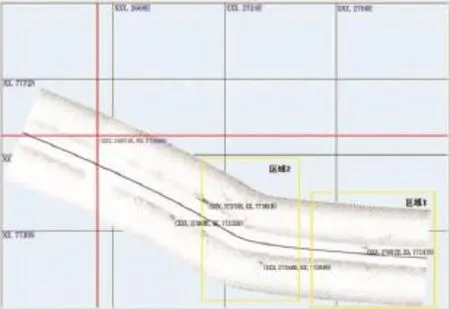
图6 侧扫声纳图像的地理编码显示
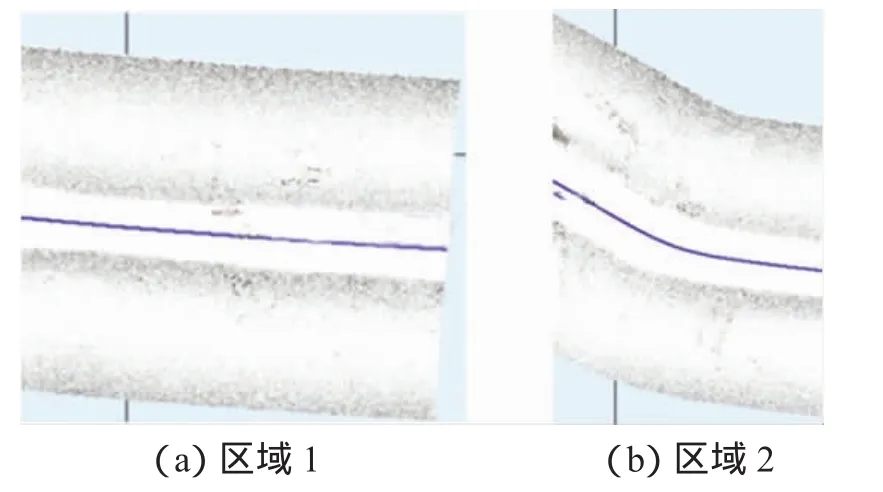
图7 侧扫声纳局部放大图
从图6~图7中可以看出:
(1)图6中,通过鼠标的点击,可对声纳图像中的任意点进行定位,实时显示该点的地理坐标,验证了本文提出的地理编码方法的可行性。
(2)通过对定位数据的三次样条拟合,定位数据得到了较好的处理,将拖鱼转弯处的侧扫声纳图像进行了放大(如图7),图像中不存在空白区域,消除了拖鱼轨迹线上的条形和扇形裂缝,再次验证了基于三次样条函数处理方法的可行性。
3 结束语
本文根据侧扫声纳数据记录方式和声纳图像特点,分析并建立了声纳图像地理编码模型,提出了声纳图像地理编码方法,并采用实测数据对方法的可行性进行了验证。结果表明:定位数据的平滑处理可有效消除声纳图像中不连续的现象,地理编码方法可为用户提供声纳图像任意一点的位置信息,直观反映海底目标物的地理位置。
[1]Edgetech.Discover 4200-MP Side Scan Processor Software User’s Manual[EB/OL].2008.http://www.edgetech.com.
[2]Edgetech.4200-FS High Definition,Multi-pulse,Dual Frequency Side Scan System User’s Hardware Manual[EB/OL].2008.http: //www.edgetech.com.
[3]Edgetech.J-Star Full SpectumDiagnostic Software Technical&User’s Manual[EB/OL].http://www.edgetech.com,2010.
[4]Edgetech.2000 Series Combined Side Scan Sonar and Sub-Bottom Profiling System User’s Manual[EB/OL].2010.http://www.edgetech.com.
[5]Edgetech.3100-P Portable Sub-BottomProcessor Sotfware[EB/OL].2007.http://www.edgetech.com.
[6]Edgetech.Discover 4125 Side Scan Processor Software User’s Manual[EB/OL].2010.http://www.edgetech.com.
[7]Flemming.BW.Side Scan Sonar:APractical Guide[J].The International Hydrographic Review,1976,53(1):65-92.
[8]Edgetech.4200 Series High Definition Dual FrequencySide Scan Sonar System[EB/OL].2008.http://www.edgetech.com,edgetech.
[9]Edgetech.4200 Side Scan Sonar SystemUser Hardware Manual[EB/OL].2010.http://www.edgetech.com.
[10]Edgetech.3100-P Portable Sub-BottomUser Hardware Manual[EB/OL].2014.http://www.edgetech.com.
[11]Edgetech.3200-XSSub-BottomSystemUser Hardware Manual[EB/OL].2015.http://www.edgetech.com.
[12]Edgetech.4125 Side Scan Sonar SystemUser Hardware Manual[EB/OL].2010.http://www.edgetech.com.
[13]Edgetech.4125 Magnetometer Interface User Hardware Manual[EB/OL].2015.http://www.edgetech.com.
[14]Edgetech.6205 Bathymetry&Side Scan Sonar User Hardware Manual[EB/OL].2015.http://www.edgetech.com.
[15]Edgetech.Description ofthe Edgetech(.jsf)File Format[EB/OL].2011.http://www.edgetech.com.
Research on the Geocode Method for Side Scan Sonar Images
CHENG Fang,HU Nai-cheng
Troop 91439,the People's Liberation Army of China,Dalian 116041,Liaoning Province,China
Based on the characteristics of various data acquired from side scan sonar,a geocode method for side scan sonar images is put forward through building the geocode model of sonar images,which achieves one-to-one correspondence between the positioning data and echo data.The experiment results prove the feasibility of this method,which can better process the positioning data,eliminate the line inflection and sector gap on the towfish trajectory,and realize geographic positioning of echo point on the seabed.
side scan sonar;data post processing;geocode;Gaussian coordinate;Bezier function;target detection
P229.1
A
1003-2029(2016)03-0032-04
10.3969/j.issn.1003-2029.2016.03.006
2015-11-01
国家自然科学基金资助项目(41474061,41374018)
成芳(1981-),女,博士,工程师,主要从事系统总体与海洋环境测量研究。E-mail:chengfangtl@163.com
猜你喜欢
贵州大学学报(自然科学版)(2021年4期)2021-09-12
潍坊学院学报(2021年2期)2021-07-22
考试与评价·八年级版(2020年5期)2020-10-29
装备制造技术(2020年12期)2020-05-22
青年歌声(2019年12期)2019-12-17
科技创新与应用(2018年36期)2018-01-29
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2016年6期)2016-11-16
数字技术与应用(2016年6期)2016-07-09
火控雷达技术(2016年2期)2016-02-06