航空机电作动器的混合整流全状态反馈控制
2016-11-15 06:02白龙孙楚周元钧
航空学报 2016年6期
白龙, 孙楚, 周元钧
北京航空航天大学 自动化科学与电气工程学院, 北京 100083
航空机电作动器的混合整流全状态反馈控制
白龙, 孙楚, 周元钧*
北京航空航天大学 自动化科学与电气工程学院, 北京100083
研究了一种适用于多电飞机供电系统的新型混合整流电路,并针对航空机电作动器负载特殊的用电特性,提出了一种基于全状态反馈的混合整流控制方法,在保证整流效果的同时,解决了负载功率短时大范围变化引起的直流电压不稳定问题。这种新型混合整流电路将二极管整流电路和脉宽调制(PWM)整流电路并联输出接负载,两者共同承担有功功率且比例可控,通过适当控制PWM电路达到网侧低谐波的目的,且当负载制动时,能量可以回馈交流侧电网。建立了混合整流器的线性化全状态数学模型,设计了基于线性二次型(LQR)最优化理论的全状态反馈控制策略。通过在MATLAB/Simulink下的建模与仿真,比较了全状态反馈控制方法与传统三状态反馈控制方法,并在机电作动器样机上进行了实验验证。仿真和实验结果表明,采用全状态反馈控制的新型混合整流方案对于功率大范围变化负载具有更好的控制性能。
航空用电设备; 机电作动器; 混合拓扑; 状态反馈; 动态特性
随着多电飞机技术的发展,机载设备的种类和数量越来越多,对飞机供电系统的要求也越来越高。航空机电作动器作为其中的一项重要负载,肩负着驱动飞机舵面偏转的任务[1-2]。由于对电机启动和制动快速性的要求,机电作动器具有功率短时大范围变化的特点,而且因电机控制采用闭环结构,使机电作动器负载具有一定负阻抗特性,这对直流供电输出的稳定性提出了很大的挑战[3]。
多电飞机的高压直流供电系统要求整流器将115 V/400 Hz交流电变换为270 V直流电[4-6]。传统的二极管整流可以完成此变换,但会将大量谐波引入到电网中[7],影响供电性能。而脉宽调制(PWM)整流器以其高功率因数、低谐波含量的特点,得到了越来越多的应用。但由于脉宽调制(PWM)整流器的升压特性,不能直接将115 V交流电变换为270 V直流电,需要加上全功率的降压变压器[8-10],增加了体积和质量,并且当变换功率增大时,开关器件的可靠性降低。有源电力滤波(APF)技术可以产生补偿电流,消除二极管整流产生的谐波,但其中PWM电路输出端只产生无功功率,没有充分利用其能够承担有功功率的特点[11]。目前在航空上应用较多的自耦变压多脉波整流(ATRU)技术在谐波抑制和功率密度方面的效果不错,但因其能量只能单向流动,因此当负载制动时,需要加入能耗电阻,导致制动效果不好[12]。
文献[13-14]提出了一种混合整流拓扑,它将二极管整流与PWM整流并联输出接负载,二极管整流提供大部分功率输出,PWM整流在消除谐波电流和补偿功率因数的同时,完成小部分功率的输出,因此降压变压器体积、质量均小于单个PWM整流器,开关器件可靠性也更高。这种新型整流电路与APF不同的是,PWM整流部分承担了比例可控的有功功率输出[14],而APF中PWM电路部分仅并联了一个电容,并没有与二极管输出并联,因此只承担无功功率。与ATRU相比,混合整流利用PWM整流能够双向运行的特点,通过检测泵升电压来控制q轴电流给定值的正负,实现能量通过PWM电路部分回馈到电网,制动效果更好。因此,基于其在体积、质量、可靠性、能量回馈以及电路利用等方面的优势,混合整流器更适用于需要快速制动的机电作动器负载,但其控制方法目前尚未得到深入研究。
文献[13-14]只对其拓扑结构和工作原理进行了介绍,并没有提出相应的控制策略。传统的双闭环PI调节策略在实际工程中应用最为广泛,可以应用到此混合整流电路中,但在负载短时大范围变化时无法保证系统稳定[9]。文献[15]提出了应用在PWM整流器上的切换控制策略,解决了其接大范围变化负载时的控制问题。文献[16]将状态反馈精确线性化方法应用到整流器控制中,取得了良好的控制效果。这些方法虽然都只针对PWM整流器,但给混合整流控制的研究提供了新思路。
本文所研究的这种新型混合整流电路不同于以往的整流方式,它结合了两种整流拓扑结构,将两者并联接负载,共同承担有功功率且比例可控,通过适当控制PWM电路达到网侧低谐波的目的,且当负载制动时,能量可以回馈交流侧电网,这种电路也更适用于机电作动器负载。通过对其控制原理和输入特性进行分析,建立混合整流线性化数学模型,结合机电作动器负载特性和状态反馈控制理论,提出了一种基于全状态反馈理论的新型混合整流控制方法,并将其应用到了航空机电作动器负载中,相比于传统三状态反馈来说,在保证整流效果的前提下,解决了负载大扰动情况下输出电压不稳定的问题,适用于航空电力系统。
1 混合整流器数学模型的建立
1.1拓扑结构与工作原理

图1 混合整流器电路拓扑Fig.1 Topology of hybrid rectifier
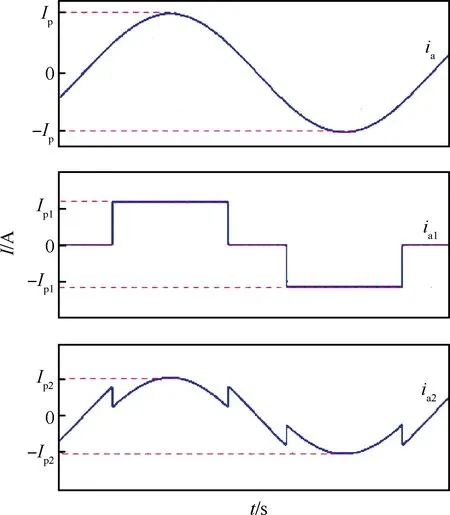
图2 混合整流器输入电流特性Fig.2 Input current characteristics of hybrid rectifier

从图1中可以看到,PWM整流电路与二极管整流电路直流输出端并联接负载,充分利用了PWM整流电路可以承担一定有功功率的特点。为了方便分析,假定电阻负载为RL。在交流侧加入电感L和L0进行滤波,二极管整流电路直流侧外串入小滤波电感Ld,并在PWM整流电路输入端接入小功率的降压变压器,以抵消PWM整流方式的升压特性,使输出电压可以控制到270 V。图2为混合整流电路A相输入电流的特性,ia为交流母线侧电流,ia1为二极管整流输入电流,ia2为PWM整流输入电流,易得ia=ia1+ia2。假定二极管整流输入电流为方波,要维持母线电流的正弦度,就要控制PWM整流产生图2所示ia2的补偿电流波形。
1.2传统三状态变量数学模型
为了便于对混合整流器控制方法进行研究,有必要建立其数学模型。参照文献[9]中给出的PWM整流器的建模方法,建立混合整流器在旋转坐标系下的线性化模型为
(1)
1.3全状态变量数学模型
为了更完整地分析混合整流方式中的两部分整流电路,在式(1)的基础上,将二极管整流部分的输入电流id1和iq1也作为状态变量,建立全状态变量的数学模型为
(2)
式中:vd1、vq1、id1和iq1为d/q坐标系下的二极管整流输入电压和电流。
2 混合整流器全状态反馈控制方法
2.1状态反馈控制原理
控制系统的状态变量包含了系统的全部动态信息,当控制信号u为输入参考信号和状态变量的函数时,可得到较好的控制效果[17]。
考虑一个线性时不变系统,状态方程为

(3)
式中:A、B和C分别为n×n、n×p和q×n维的实常量矩阵;x为系统状态变量;y为系统的输出。
如果在系统上加入线性状态反馈u=m-Kx,就构成了状态反馈闭环控制的系统动态方程:

(4)
式中:K为反馈矩阵;m为p维控制向量。
2.2全状态反馈控制方法
2.2.1控制思想的提出
在PWM整流器上应用最为广泛的是同步坐标系下的电流前馈解耦控制,实质是将d/q轴电流作为状态变量进行反馈,与给定值作差进行无静差跟踪控制,对应到混合整流电路上,是根据数学模型式(1)进行三状态反馈控制。但当负载突变时,二极管整流部分迅速响应并随之变化,PWM整流部分因控制器的存在,有一定的延迟。由于并联输出接负载的结构,整流过程产生了不同步的情况,影响了整个系统的控制性能。要消除这种影响,就要将二极管整流的输入电流也作为状态变量进行反馈,设计出考虑系统全部状态变量(x=[id1iq1id2iq2v]T)的反馈矩阵K,达到更好的动态性能。
2.2.2线性二次型方法设计反馈矩阵
设计反馈矩阵的方法有极点配置和线性二次型(LQR)最优控制等。由于混合整流器中二极管整流部分输入电流id1和iq1不可控,不适宜采用极点配置法。而采用LQR方法进行设计可以使系统具有高鲁棒性和最优跟踪控制性能,此方法对于过渡过程的最优运行来说,不要求id1和iq1的可控性,因此适用于本文所研究的混合整流系统[18]。
对于控制信号u(t),可以得到相对于状态和控制的LQR指标函数为
式中:Q为正定或半正定矩阵;R为正定矩阵。LQR最优控制问题,即为寻找一个容许控制信号u(t),使其沿着由初态x0出发的状态轨迹曲线x(t),性能指标函数J(u)为极小值。通过代入状态矩阵可以列出一个Riccati微分方程,如式(5)所示,得到解阵P(t)。
P(t)B(t)R-1(t)BT(t)P(t)
(5)
最优控制的充要条件为u(t)=-Kx(t) ,其中K=R-1BTP。基于这种方法,LQR设计问题就转化为了一个求解Riccati方程的问题,可以使用MATLAB中lqr命令求解系统反馈矩阵K。Q阵和R阵在工程应用中一般选取对角阵,其中Q=diag(q11, q22, q33, q44, q55),对角线上元素qii表示相对误差变量xi对控制性能的影响程度,值越小影响越大[19]。Q阵先选取单位矩阵,然后根据具体的控制效果进行调整,R阵一般选取单位矩阵即可。
2.2.3全状态反馈无静差跟踪
2.2.2节得到的状态反馈矩阵K,可以提高系统的动态性能,但不能达到稳态输出无静差[17],需要在控制中增加偏差的积分项,构造全状态反馈增广矩阵。

(6)
(7)
对应到混合整流控制系统来说:
1) 实现对PWM整流部分控制电流的跟踪和更好的动态性能。K1即为LQR方法得到的反馈矩阵K,表达式为
(8)

(9)

(10)
(11)
式中:Δi2、Δid2和Δiq2分别为i2、id2和iq2的偏差值,即给定值与反馈值的差。
二极管整流部分电压vd1和vq1的值不会随着系统控制值(占空比)改变而变化,为了简化分析,可认为是定值。将式(7)~式(11)代入到式(6)中,得到加入全状态反馈矩阵及状态方程增广后的混合整流系统控制模型,如式(12)所示,控制结构如图3所示,*表示给定值。
(12)
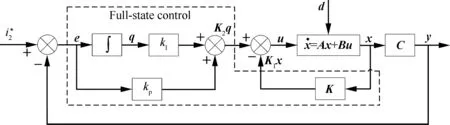
图3 全状态反馈控制系统结构Fig.3 Structure of full-state feedback control system
应用中适当选取K2矩阵的值,使式(12)中的增广矩阵特征值均具有负实部,就可以实现状态反馈控制对输出y的无静差跟踪[17]。
2.3混合整流器全状态反馈闭环控制策略
2.3.1外环功率分配控制


图4 外环控制结构Fig.4 Outer loop control structure

2.3.2内环电流给定
电流环跟踪的是正弦波减去方波的信号,如图2所示,同时也是PWM整流部分所要产生的补偿电流。本文采用PI调节器控制,算法实现简单,有利于工程应用。
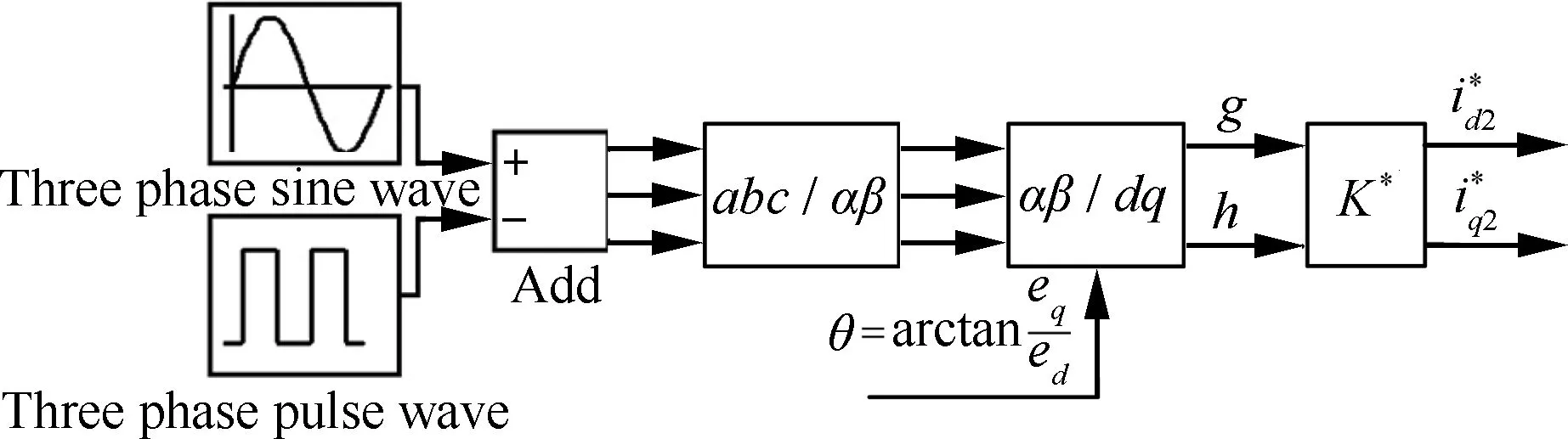
图5 内环电流给定Fig.5 Given current of inner loop
2.3.3内环电流控制
由式(12)中的增广矩阵可得全状态反馈系统控制方程为
(13)
而文献[9]中提出的PWM整流器所用的三状态反馈控制方程为
(14)
由式(13)与式(14)可知,全状态反馈系统与三状态反馈系统相比,将状态变量id1和iq1对系统的影响引入到了控制方程中。两种不同方式的内环结构如图6和图7所示。图6中SVPWM为空间矢量脉宽调制(SpaceVectorPulseWidthModulation)算法模块,G为功率开关器件的六路导通信号。
图7虚线部分即为全状态反馈控制器,它的加入将混合整流器中二极管整流输入电流的动态影响考虑进来,来改善系统的动态响应。图4、图5 和图7构成了完整的混合整流系统控制结构。
内环电流调节要求快速的跟踪性能,按照典型I型系统进行控制参数设计。由于d/q轴电流的对称性,以q轴电流为例,并参考文献[9]中电流内环设计方法,得到PI调节器的参数为

图6 三状态反馈电流内环结构Fig.6 Inner loop structure of three-state feedback control

图7 全状态反馈电流内环结构Fig.7 Inner loop structure of full-state feedback control
式中:Ts为PWM开关周期;KPWM为PWM整流方式等效增益,即直流电压与三角波幅值的比值;kip为比例系数;kii为积分系数。
3 航空机电作动器的负载特性
3.1动态负载特性
航空机电作动器驱动飞机舵面的偏转,要求其具有快速的启动和制动性能,负载特性如图8所示。

图8 航空机电作动器负载特性Fig.8 Characteristics of aircraft electric actuator load
舵面偏转过程中机电作动器功率的变化大致分为3个阶段:
1) 加速阶段。整流器供电使电动机启动运行,带动惯性负载(包括电动机转子、机械传动装置以及飞机舵面等)开始转动。启动过程对快速性要求很高,会产生很大的电流冲击,此时出现第1个峰值功率,通常为稳态时功率的8倍以上。
2) 带载运动阶段。作动器启动完成后,驱动舵面开始偏转,负载力矩与舵面偏转角成正比关系,即铰链力矩负载,功率呈线性上升规律,偏转到最大角度时,作动器产生最大功率。
3) 保持舵面位置阶段。舵面偏转到要求的位置后,电动机停止转动,同时提供一定的转矩来保持舵面位置,功率也基本保持稳定。

3.2恒功率特性
恒功率是指功率恒定的一种非线性负载特性,航空机电作动器负载的功率随时间变化,严格来说它并不是一种恒功率负载。但应用小信号理论进行分析时,由于作动器中的电机控制系统采用三闭环结构(位置环、速度环以及电流环),当负载电流减小或增大时,电压会呈现相反的规律,表现出一定的恒功率特性[3]。
由3.1节和本节可知,航空机电作动器是一种功率短时大范围变化、呈现恒功率特性的负载,它的存在会影响到直流电压的稳定性[20],此时就要求整流器具有极高的抗干扰能力。同时由于混合整流器结构的特殊性,具有两部分整流电路,有必要将包含了两部分输入电流变量的全状态反馈闭环控制方法应用到其带作动器负载的情况中。
4 仿真结果分析
4.1混合整流器参数
多电飞机混合整流器的参数如表1所示[21]。

表1 混合整流仿真模型参数
根据表1中的数据和2.3.1节和2.3.3节中关于控制参数的设计方法,可以得到控制器参数为kvp=7.27,kvi=160,kip=0.17,kii=66.67。
通过控制器参数可以得到K2矩阵的值,m11=m21=160;m12=66.67;m22=0.17;m23=66.67;为使K2列向量线性无关,m13微调为 0.14,即q轴电流比例系数微调为0.14。
Q阵和R阵先选取单位矩阵(调整过程见4.3节中的仿真结果)得到全状态反馈矩阵为
K1=[Δ1Δ2]
式中:
将K2矩阵和K反馈矩阵代入增广矩阵式(12)中,使用maple工具计算,特征值分别为-2.692 3, -2.454 4, -0.285 7+0.251 3i, -0.285 7+0.251 3i, -0.105 3, -0.012 8, -0.001 1, -0.000 8, 均具有负实部,因此控制参数结果可以实现状态反馈控制对输出y的无静差跟踪。
4.2电流谐波仿真
图9为混合整流器输入电流的仿真结果。母线电流ia保持了较好的正弦度,谐波含量如表2所示。可见采用了全状态反馈控制方法的混合整流器可以很好地补偿谐波电流。

图9 混合整流器输入电流仿真结果Fig.9 Simulation results of input current of hybrid rectifier
表2为混合整流器电流谐波含量。由表2可以看出,混合整流方式的各次谐波含量相比于二极管整流方式大大降低,虽然不如单个的PWM整流器的谐波抑制效果(可以做到低于1%),但其电路本身具有优势。与航空DO-160谐波标准进行比较,5次谐波基本相当,其他次谐波均低于谐波要求,适用于航空电网。可见本文所研究的新型混合整流控制方案能够保证不错的整流效果。

表2 混合整流器电流谐波含量
4.3动态负载仿真
在MATLAB/Simulink下建立机电作动器负载模型,动态性能如图8所示。根据适航标准,要求负载动态变化时,整流器输出电压变化不超过10%。分别对18脉波ATRU、三状态反馈混合整流和全状态反馈混合整流等整流方案进行仿真,结果如图10所示。
图10(a)为18脉波ATRU接作动器负载的仿真结果,输出端稳压电容为2 000 μF,与混合整流器相同。当电动机在启动和制动过程中负载发生突变时,电压有较大的变化,不能保证直流电压270 V的稳定输出,最低时降到了250 V,且电流峰值也较大,这是由于ATRU不具备稳压功能而造成的,稳态时靠稳压电容可以保持电压稳定,但当负载动态变化时,整流性能变差。
图10(b)、图10(c)和图10(d)为本文所研究的新型混合整流器接作动器负载的仿真结果。图10(b)采用三状态反馈控制方案,直流电压能够稳定在270 V,但同样是在启动和制动阶段,电流短时突变时,电压有明显的降低与抬高,最低值降到了238 V,不满足动态压降低于10%的要求,因此该种方法对于快速大范围变化负载的调节能力有限。
图10(c)和图10(d)为全状态反馈控制方案的仿真结果,差别在于Q阵的取值不同。可以看到,直流电压能够稳定在270V,且电流突变时动态压降很小,满足低于10%的要求。图10(c)所采用的Q阵中与状态变量id1和iq1相对应的对角线元素q11和q22分别为0.92和0.91。虽然在电流突变时,电压压降不大,但会产生短时的振荡。而图10(d)减小了对角线元素的值,分别为0.81和0.77,振荡得到了明显的消除,稳压效果更好。这是因为减小Q与id1和iq1对应的对角线元素的值,放大了id1和iq1状态变量的误差对系统控制的影响程度,经过多次参数调整与仿真,得到了图10(d)所示的比较理想的控制性能。

图10 不同整流控制方式下动态负载仿真结果Fig.10 Simulation results of dynamic load with different rectifiers
图11为机电作动器制动过程中的交流侧电压和电流波形,在0.680~0.700s的时间内(虚线框所标注部分),电流与电压反相,PWM整流电路部分工作于逆变状态,二极管整流电路不工作,电流回流到电网侧,说明了混合整流器能够实现能量回馈。

图11 交流母线端电压和电流仿真波形Fig.11 Simulation wave of AC voltage and current
5 实验结果
混合整流电路实验以TM320F2812为控制核心,并采用功率器件IGBTSKM100GB123D搭建了单控型混合整流器控制系统,电气参数如表1所示,与仿真条件一致,实验负载功率为7kW。
5.1输入电流实验
如图12所示,通过PWM电路部分的谐波补偿,交流侧母线电流保持了较好的正弦度。总谐波畸变率(THD)值约为5.23%,符合航空谐波要求。交流侧电流峰值约为27.5A,输入功率为Pin=6 953.3kW,三用表测得直流侧电压和电流分别为270.2V和22.9A。得到的整流器效率为

图12 混合整流器输入电流实验结果Fig.12 Experimental results of input current of hybrid vectifier
5.2动态负载实验
在机电作动器实验平台上进行了不同整流方式下动态负载实验,得到实验结果如图13所示。
图13(a)中采用的ATRU方式在负载突变时,整流电压发生剧烈变化,且作动器带载运行过程中,电压呈现下降趋势。图13(b)中采用的传统三状态反馈混合整流方式时,稳态过程电压能够保持在270V稳定不变,但当负载突增突降时,电压也随之突变,变化值超过了适航标准的要求。图13(c)和图13(d)采用不同Q阵取值的五状态反馈混合整流方式,电流冲击得到了一定抑制。Q阵取值与仿真对应,取值不理想时,直流电压在突变出发生轻微抖动,采用理想Q阵取值,抖动消除。在负载功率短时突变时,装在混合整流器直流输出端的电流表指针向反方向偏摆,此时PWM整流部分工作于逆变状态,实验结果如图14 所示,系统制动过程中,电流与电压反相,实现了能量回馈电网。

图13 不同整流控制方式下动态负载实验结果Fig.13 Experimental results of dynamic load with different rectifiers
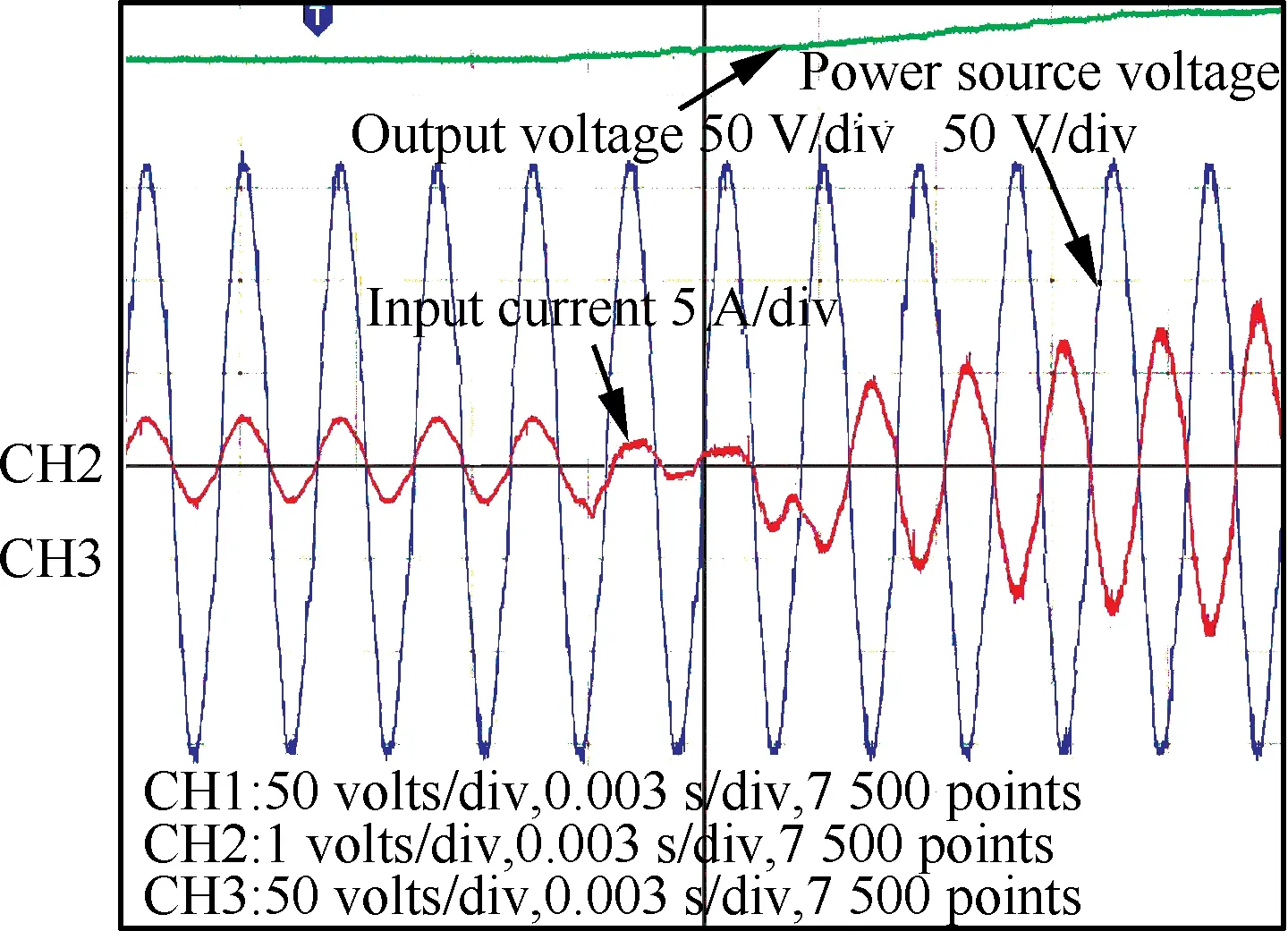
图14 能量回馈实验结果Fig.14 Experimental results of power feedback
由上述分析可知,实验结果与仿真结果基本一致。
6 结 论
本文旨在将混合整流技术应用到多电飞机供电系统中,研究了一种适用于航空电能变换的新型混合整流电路,提出了一种基于线性二次型最优化理论的全状态反馈控制方法,通过仿真和实验分析表明:
1) 解决了负载突变时输出电压动态压降大的问题,与传统三状态反馈方法控制相比,输出直流电压更为稳定,且电流冲击得到了一定抑制,更适用于航空机电作动器负载。
2) 实现了能量通过PWM电路部分回馈电网,提高了制动效果,节省了能源。
3) 新型混合整流电路保证了不错的整流效果,动态性能也优于ATRU,谐波含量符合航空标准要求,具有较强的工程实用性。
[1]ROSERO J A, ORTEGA J A, ALDABAS E, et al. Moving towards a more electric aircraft[J]. IEEE Aerospace and Electronic Systems Magazine, 2007, 22(3): 3-9.
[2]GARCIA A, CUISDO J, ROSERO J A, et al. Reliable electro-mechanical actuators in aircraft[J]. IEEE Aerospace and Electronic Systems Magazine, 2008, 23(8): 19-25.
[3]王娜, 周元钧. 基于负阻抗补偿法的调速系统阻抗特性分析[J]. 中国电机工程学报, 2013, 33(33): 50-56.
WANG N, ZHOU Y J. Impendance characteristics analysis of speed regulation system with negative input-resistance compensators[J]. Proceedings of the CSEE, 2013, 33(33): 50-56 (in Chinese).
[4]吕宏, 袁海文, 张莉, 等. 基于模式重要度的航空电源系统可靠性估计[J]. 航空学报, 2010, 31(3): 608-613.
LU H, YUAN H W, ZHANG L, et al. Aircraft electrical power system reliability estimation based on pattern importance[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(3): 608-613 (in Chinese).
[5]MARIO R, ATEPHEN J. Aircraft electrical system architectures to support more electric aircraft[C]//Avionic & Systems Conference, 2004: 27-35.
[6]JOSEPH A, WEIMER J A. Electrical power technology for the more electric aircraft[C]//IEEE/AIAA 12th DASC. Reston: AIAA, 1993: 445-450.
[7]ARRILLAGA J, MEDINA A. The harmonic domain: A frame of reference for power system harmonic analysis[J]. IEEE Transactions on Power Systems, 1995, 10(1): 433-440.
[8]陈坚. 电力电子学[M]. 北京: 高等教育出版社, 2010: 194-199.
CHEN J. Power electronics[M]. Beijing: Higher Education Press, 2010: 194-199 (in Chinese).
[9]张崇巍, 张兴. PWM整流器及其控制[M]. 北京: 机械工业出版社, 2003: 69-78.
ZHANG C W, ZHANG X. PWM rectifier and its control method[M]. Beijing: China Machine Press, 2003: 69-78 (in Chinese).
[10]张巍, 尚晓磊, 周元钧, 等. 一种适用于航空电力作动器负载的三相PWM整流器最大功率控制[J]. 电工技术学报, 2011, 26(8): 91-98.
ZHANG W, SHANG X L, ZHOU Y J, et al. A maximum power control method of three-phase voltage source rectifiers adapted to aircraft electric actuator load[J]. Transactions of China Electrotechnical Society, 2011, 26(8): 91-98 (in Chinese).
[11]王兆安, 杨军, 刘进军, 等. 谐波抑制与无功功率补偿[M]. 北京: 机械工业出版社, 2005: 257-321.
WANG Z A, YANG J, LIU J J, et al. Harmonic suppression and reactive power compensation[M]. Beijing: China Machine Press, 2005: 257-321 (in Chinese).
[12]张方华, 王明, 马义林, 等. 输入电压不平衡时的12脉冲自耦变压整流器[J]. 航空学报, 2010, 31(4): 762-769.
ZHANG F H, WANG M, MA Y L, et al. 12-pulse auto transformer rectifier unit under input voltage unbalance[J]. Acta Aeronautica et Astronautica Sinica, 2010, 31(4): 762-769 (in Chinese).
[13]CARLOS H I F, IVO B. A new high power factor bidirectional hybrid three-phase rectifier[C]//IEEE Applied Power Electronics Conference and Exposition. Piscataway, NJ: IEEE Press, 2006: 1300-1306.
[14]RICARDO L A, IVO B. Analysis and implementation of a hybrid high power factor three phase unidirectional rectifier[J]. IEEE Transactions on Power Electronics, 2009, 24(3): 632-640.
[15]ZHANG W, HOU Y Z, LIU X B, et al. Switched control of three-phase voltage source PWM rectifier under a wide-range rapidly varying active load[J]. IEEE Transactions on Power Electronics, 2012, 27(2): 881-890.
[16]杨培志, 张晓华, 陈宏钧, 等. 三相电压型PWM整流器模型准线性化[J]. 电工技术学报, 2007, 22(8): 28-36.
YANG P Z, ZHANG X H, CHEN H J, et al. Study of model quasi-linearization of three-phase voltage-type PWM rectifiers[J]. Transactions of China Electrotechnical Society, 2007, 22(8): 28-36 (in Chinese).
[17]郑大钟. 线性系统理论[M]. 北京: 清华大学出版社, 2011: 305-334.
ZHENG D Z. Linear system theory[M]. Beijing: Tsinghua University Press, 2011: 305-334 (in Chinese).
[18]张锋. 线性二次型最优控制问题的研究[D]. 天津: 天津大学, 2009: 9-15.
ZHANG F. Research on the problem of linear quadratic optimal control[D]. Tianjin: Tianjin University, 2009: 9-15 (in Chinese).
[19]KHAJEHODDIN S A, GHARTEMAN M K, BAKHSHAI A, et al. High quality output current control for single phase grid-connected inverters[C]//IEEE Applied Power Electronics Conference and Exposition. Piscataway, NJ: IEEE Press, 2014: 1807-1814.
[20]王娜, 周元钧. 负阻抗补偿法在机电作动器上的研究与应用[J]. 电机与控制学报, 2014, 18(4): 25-30.
WANG N, ZHOU Y J. Research and application on the negative input-resistance compensator for aircraft electromechanical actuator[J]. Electric Machines and Control, 2014, 18(4): 25-30 (in Chinese).
[21]WEIMER J A. Electrical power technology for the more electric aircraft[C]//IEEE/AIAA 12th Digital Avionics Systems Conference. Piscataway, NJ: IEEE Press, 1993: 445-450.
白龙男, 博士研究生。主要研究方向: 航空电源及电力电子技术。
Tel: 010-82314534
E-mail: bailong880406@126.com
孙楚男, 硕士研究生。主要研究方向: 航空电机设计。
E-mail: sunchu@buaa.edu.cn
周元钧女, 教授, 博士生导师。主要研究方向: 电力电子与电力传动。
Tel: 010-82314534
E-mail: zhouyuanjun@263.com
Full-state feedback control of a novel hybrid rectifier applied toaircraft electric actuator load
BAI Long, SUN Chu, ZHOU Yuanjun*
School of Automation Science and Electrical Engineering, Beihang University, Beijing100083, China
A novel hybrid rectifier is presented which is applied to more electric aircraft power source and full-state feedback control is proposed according to the characteristics of aircraft electric actuator. The control aims to solve the problem of big output voltage dip caused by wide-range rapid varying load. The novel hybrid rectifier structured by a diode rectifier in parallel with a pulse width modulation (PWM) rectifier can limit harmonic current effectively, and the PWM part of the hybrid rectifier can bear the active power output whose proportion can be controlled properly and energy can be fed back to aviation source when load is braking. Linear mathematical model of the hybrid rectifier is then established and full-state feedback control based on linear quadratic regulator (LQR) is proposed. Comparison is made between full-state feedback control and three-state feedback control based on the results of MATLAB/Simulink simulation and prototype experiment, which verifies the improved performance of the hybrid rectifier applied to wide-range varying load.
aviation electric equipment; actuator; hybrid topology; state feedback; dynamic characteristics
2015-07-08; Revised: 2015-08-10; Accepted: 2015-09-07; Published online: 2015-09-2416:02
. Tel.: 010-82314534E-mail: zhouyuanjun@263.com
2015-07-08; 退修日期: 2015-08-10; 录用日期: 2015-09-07;
日期: 2015-09-2416:02
www.cnki.net/kcms/detail/11.1929.V.20150924.1602.006.html
.Tel.: 010-82314534E-mail: zhouyuanjun@263.com
10.7527/S1000-6893.2015.0249
V242.2; TM461
A
1000-6893(2016)06-1940-13
引用格式: 白龙, 孙楚, 周元钧. 航空机电作动器的混合整流全状态反馈控制[J]. 2016, 37(6): 1940-1952. BAI L, SUN C, ZHOU Y J. Full-state feedback control of a novel hybrid rectifier applied to aircraft electric actuator Load[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(6): 1940-1952.
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
URL: www.cnki.net/kcms/detail/11.1929.V.20150924.1602.006.html
猜你喜欢
电气技术(2022年6期)2022-06-27
云南电力技术(2021年6期)2022-01-18
科学家(2021年24期)2021-04-25
汽车实用技术(2021年3期)2021-02-24
发电设备(2020年2期)2020-04-06
电子制作(2018年18期)2018-11-14
电子制作(2018年17期)2018-09-28
电子制作(2018年9期)2018-08-04
西安航空学院学报(2017年3期)2017-07-05
电子制作(2017年19期)2017-02-02