
交流传动电力机车动力性能控制
2016-11-18 11:56王芳兰
环球市场信息导报 2016年29期
◎王芳兰
交流传动电力机车动力性能控制
◎王芳兰
文章通过对机车动力控制方式,交流电机的特性,及电机工作参数控制的方法,对机车牵引变流器的原理、结构、控制进行了细致的分析和论述。机车的控制是通过动态调整交流牵引电机实际工作点,以适应机车牵引特性的要求,四象限整流器调节的是输入电压与电网电压的相位关系,牵引逆变器调节的是输出电压与交流牵引电机转速的匹配关系,调节的主线是保持能量传输的动态平衡。使机车性能控制满足重载牵引运输的需要,并最大限度地利用了电网的牵引供电能力。
和谐系列大功率交流传动电力机车现在已经成为我国重载牵引的主力机型,到现在我段配属机车中,和谐1型、和谐2型大功率交流传动电力机车占到配属机车的80%以上。而现有技术资料有限,且由于知识产权和技术保密等原因,至今还没有一种技术资料对其控制方式进行系统解释和说明。为了方便广大职工学习和掌握和谐型重载机车的理论知识,结合和谐1型、和谐2型、和谐3型大功率交流传动电力机车的控制方式不同和本人的理解,现对和谐系列大功率交流传动机车性能控制理论进行进一步的探讨。
机车动力控制概况分析
机车性能参数的控制主要是由机车司机通过司机控制器来控制机车的工作状态和参数,以达到控制机车动力输出的工作状态。从内燃机车、交直流传动电力机车到交直交传动机车,其控制方式和控制原理是有较大的区别的。
内燃机车由于机车自带全部动力系统,其动力控制是通过控制发动机的转速和输出功率以及机车的牵引制动工况,实现完全控制机车的动力性能。
交直流传动电力机车,由于其馈电电源来自交流电网,无法对线路上的每台机车单独控制,在电源动力转换时,主变压器采用有级控制的方式。通过控制主变压器工作时的变比,控制传动装置输出的电压和功率。
对于以上两种类型的机车,由于传动装置输出能在较大速率范围内符合牵引动力的牛马特性,利用传动装置的自然特性,不需要对传动装置进行专门控制,只需要把司机控制器手柄信号转换为发动机转速控制信号或主变级数控制信号,就完全可以实现机车牵引动力和状态的控制。
对于交直交流传动的和谐系列大功率电力机车,由于采用了交流牵引电机作为机车动力驱动单元,而交流电机的工作特性自适应的工作范围比较窄,只有在电源工作频率下方很小的范围内电机才能稳定工作,所以必需对传动装置进行相对复杂的动态控制,使其在机车全部工作状态的范围内,输出使交流电机能够稳定工作的可控制电源。

和谐系列机车的牵引特性分析
由和谐1型、和谐2型及和谐3型大功率交流传动电力机车的牵引特性(如图)可以看出,机车的全部工作范围按速度可以分为3个阶段:即恒牵引力工作区段、线性控制工作区段和恒功率控制工作区段三个限制工作区段。
在牵引工况下,分为机车恒牵引力(转矩)启动阶段、线性控制加速阶段和恒功率调速牵引工作区段。在启动阶段,机车速度低于5km/h(和谐3型机车为10km/ h)时,机车牵引力恒定不变,在机车速度达到65km/h(25吨轴重机车为70km/h)时,机车进入恒功率调速控制模式,在5km/h到65km/h之间的区间采用线性调速控制模式。和谐1型和和谐2型机车控制采用无级调速恒速控制方式,而和谐3型机车采用分级调速控制方式,在机车手柄级数较低时(5级以下)不会进入力矩限制工作区段,机车从恒牵引力工作状态直接进入准恒速工作状态;在机车手柄级数较高(7级以上)时,机车经过恒牵引力控制、线性控制和恒功率控制三个限制工作区段进入准恒速工作状态,当机车速度进入较高速度范围,电机工作电压和工作电流都达到最大值时,只能改变输出频率进行调速,机车进入限制特性工作区。
在机车动力制动工况下,在机车运行速度较高时,机车工作在恒功率制动控制模式,在机车运行速度较低接近停车区域时,机车工作在线性控制工作模式,在中间区段,机车工作在恒制动力的限制工作模式。在参数设计上,和谐1型机车23吨轴重和25吨轴重机车工作区段转折点相同,都是5km/h和75km/h。和谐2型机车线性限制工作区与恒制动力限制工作区的转折点是10km/h,恒功率制动限制工作曲线在机车不同轴重情况下,进入恒制动力限制工况转折点的速度和制动力是不同的,轴重越大,其制动力越大,转折点速度越低。和谐3型机车采用有级控制准恒速控制模式,机车采用25吨轴重时在恒制动力区和恒功率区的制动力都要比23吨轴重机车的制动力要大,而各个手柄位的限制曲线不变,手柄位越高,其限制制动速度越高,当机车运行速度低于限制速度时机车动力制动力会迅速下降,机车失去动力制动的作用,在操纵中司机要根据机车运行速度的变化及时调整手柄位置,保证机车处于正常动力制动的工作状态。
和谐系列机车牵引电机特性分析
和谐系列大功率交流传动电力机车牵引电机采用感应式三项异步电动机。根据交流电机的扭矩特性(如图4)可以看出,交流电机在电源电压和频率不变的情况下,其工作范围可分为三个部分,从电机启动点A到最大扭矩点B之间,电机的扭矩随着转速的增加而增大,电机处于加速启动状态,在电机转速超过最大制动扭矩B’点以后,制动扭矩随转速的增大而减小,在这两个工作区段,电机处于不稳定的工作状态;从电机最大扭矩点B到同步转速点C之间,电机输出扭矩随着转速的增加迅速减小至零,超过同步转速点C之后,电机进入动力制动状态,变为按照发电机工作状态运行,到最大制动扭矩B’点之间,制动扭矩随转速的增大而增大,电机输出特性与负载特性相匹配,电机处于稳定的工作状态。当机车由于负载变化,速度增加时,电机通过减小输出扭矩或增加制动扭矩,使机车速度回复稳定的工作速度,达到新的工作平衡点。同样,当机车由于负载变化,速度减小时,电机通过增大输出扭矩或减小制动扭矩,使机车速度回复稳定的工作速度,达到新的工作平衡点。在从B点到B’点的全部工作区段中,电机在每一点都可以通过动态调整是电机自动处于稳定的工作状态。交流电机稳定状态工作转速范围很小,当电机转速与旋转磁场一致达到同步转速时,电机的输出扭矩降为零。也就是说要使电机一直保持稳定的工作状态,必须把电机的转差率控制在一个很小的范围内,使电机转速稳定工作在同步转速附近。
转子电流I2和转子功率因数COSφ2可用公式表示,带入转矩公式后,公式可变换为:

E20为电机静止时转子自感电动势,S为转差率,R为转子内阻,X20为电机静止时转子感抗。
额定工况工作时电机转差率S很小,与转子阻抗R2相比S·X20可以忽略不计,而Φ、E20都与电压U成正比,交流电机的扭矩公式可以变换为T=K(U/f)2fs,fs为转差频率。从公式可以看出电机输出扭矩与电源电压与频率的比值的平方成正比,与电机的转差频率成正比。根据交流电机特性曲线(如图4)、和谐系列机车的牵引制动特性曲线(如图1-3)及和谐1型、和谐2型及和谐3型机车牵引电机特性曲线(如图5-7)要求可以看出,只要分别控制变流器输出的频率、电压,就可以控制交流牵引电机同步转速和输出扭矩,按机车设计的牵引和制动特性曲线,控制机车按设定的参数运行。

和谐系列机车牵引变流器性能控制的分析与探讨
根据交流牵引电机的特性分析,通过调整主变流器输出电压的频率,可以调控交流牵引电机的同步运行转速。在变流器输出电压不变时,随着电机运行转速的增加,电机输出扭矩与电源频率的平方成反比例下降。为了使变流器的输出与交流电机的工况相匹配,需要单独控制变流器的输出的电压和频率。
分析和谐1型、和谐2型、和谐3型大功率交流传动机车主变流器,虽然其所选原件和控制参数有所差异,其控制原理都是一样的。
机车主牵引变流器分为四象限整流器、中间直流环节和四象限逆变器三个部分,整流器和逆变器的核心原件都是采用的IGBT模块。IGBT(Insulated Gate Bipolar Transistor)绝缘栅双极型晶体管,有输入阻抗高和导通压降低两方面的优点。驱动功率小,非常适合应用于变频器。IGBT模块是由IGBT(绝缘栅双极型晶体管芯片)与FWD(续流二极管芯片)通过特定的电路桥接封装而成,封装后的IGBT模块直接应用于变频器。中间直流环节采用巨型电容作为储能元件,可以把整流器和逆变器隔离开来,吸收IGBT模块通断时产生的高次谐波,使中间直流环节保持稳定的工作电压。由于主变流器的四象限整流器和四象限逆变器都采用IGBT模块,在不采取任何控制时,整流器就是一个全桥单相整流器,逆变器就是一个三相全桥整流器。在对IGBT进行控制的情况下,整流器和逆变器都可以在四个相限进行工作。通过控制IGBT模块的通断,控制交流端电压的大小、频率和相位角,就可以控制其工作在整流器或者逆变器的工作状态。下面对变流器各工作单元在不同工况下工作状态进行具体的分析。
机车牵引工况下变流器工作状态分析
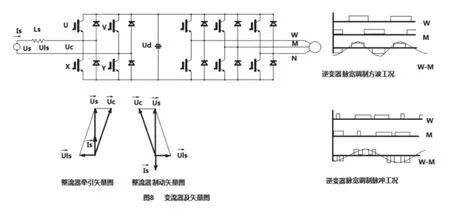
由于IGPT模块开关损耗及冷却条件的限制,其最大工作频率受到一定的限制,调制频率不能超出IGPT的限制工作频率。在高速区段,由于变流器输出端电压已经达到工作的最大值,只能通过调整输出频率和转差频率来调节机车运行速度,因此,在高速区段可采用单倍频方波调制方式,直接输出方波电压波形。在速度较低时,由于输出频率较低,采用方波调制会产生较大的谐波干扰,功率因数较低,为了改善波形,提高效率,改善牵引电机的工作条件,一般釆取方波脉冲调制方式输出。
变流器的输出最终是要控制三相交流牵引电机进行调速,从牵引逆变器的控制来看逆变器要实现以下三方面作用:
首先要进行相位控制来保证按三相交流电相位进行输出;通过对逆变器三相整流模块W、M、N的IGPT模块控制的调制基波按120度的相位差进行控制,由于三相桥输出波形与与其对应的调制基波波形保持一致,可保证牵引逆变器按标准三相交流电相位进行输出。第二,要进行电压和频率控制,保证牵引电机扭矩特性按机车的牵引特性要求输出;要控制变流器输出电压与频率的比值大小,使其与牵引电机输出扭矩一致。逆变器的输出是通过IGBT模块的通断,使其输出端与中间直流电源或地直接联通,使其输出幅值为直流电源电压的矩形脉冲。通过调制波与载波信号的比较来控制IGBT模块的通断,改变载波与调制波的幅值比,可以改变IGBT模块输出的占空比,相应的改变单个周期的电压的平均值;通过改变单位时间内周期的个数,改变输出电压的频率,可以改变交流电机的同步转速。在调节过程中保持电压与输出频率的比值不变,可以保持电机输出的扭矩在速度变化时保持不变,实现电机的恒扭矩调速。第三、要进行转差率控制,保证电机工作在稳定工作区;从电机扭矩特性曲线可以看出,在电机加速调节过程中,随着电机转速的增加,转差率迅速减小,当电机转速接近到同步转速时,电机输出扭矩迅速减小到零输出。当电机转速减小,转差率增大时,电机输出扭矩同时增大,提高机车的加速能力。如果超过最大扭矩点,电机进入不稳定工作区,就会造成扭矩输出迅速减小,造成机车途中停车。所以,牵引逆变器的控制主要是根据机车实际运行速度,也就是电机的转速,控制逆变器调制基波的频率,使电机工作在规定的转差率范围内,同时控制输出电压大小,使牵引电机扭矩输出按机车牵引曲线运行。由于电机转差率控制在很小的数字上,使电机的功率因数保持很高接近于1,保证电机输入的功率全部用于对外输出,提高了机车能源利用效率,同时减小了电机的谐波冲击和电机发热,改善了电机的工作条件。
根据电机的扭矩特性分析,电机在输入电压和频率不变的情况下,电机的输入电流可用以下公式表示:
I=(U-E1-E2)/R
U—输入端电压;E1—定子线圈自感电动势;E2—转子线圈互感电动势;R—定子线圈电阻。
在电机启动之前,由于电机转子处于静止状态,定子线圈的自感电动势是保持恒定抵消绝大部分电压,E2反向最大,电源合成后,相当于E2电压全部加在定子电阻上,电机的启动电流非常大,一般电机的启动电流都在额定电流的6~8倍左右。随着电机转速的升高,E2迅速增大,使电机电流迅速减小。在电机稳定工作区的范围内,电机电流随转速的增加成线性减小关系。

四象限整流器是变流器中的另一个主要环节,是变流器中的能量输入环节,与中间直流储能环节共同构成能量传递的传送控制链。
四象限整流器主要要解决以下几个问题:保持中间直流环节的电压保持稳定;保持整流电流满足牵引电机工作时的需要;保证机车供电电流变化趋势与电网供电电压相匹配。
从四象限整流器的结构分析,四象限整流器采用IGBT元件与二极管反向并联的方式,使其具有电流双向流通单向可控的特点,按照全桥整流方式联结后,使其整流具有双向可控的能力,在交流端电压或直流负载发生变化的情况下,直流输出电压可以控制在恒定的状态。
四象限整流器在IGBT控制信号关闭的情况下,与二极管全桥整流电路是一样的。由于电路中存在非线性的滤波电容和和电机线圈电感元件,电路的功率因数不可能达到1.0的数值。采用四象限整流的主要功能就是实现功率因数的控制。
四象限整流器控制功率因数的方法是让网侧电流接近正弦波,并且与电压同相。为控制电压和电流的相位关系,在变流器的四象限整流器与主变供电线圈之间串联一个电感线圈,用以补偿变流器工作时由于负载电流变化中间直流环节滤波电容造成的供电电源相位的变化。由于补偿电感线圈的电压Uls超前电流Is相位90度,电压的大小与通过的电流Is和频率f成正比,所以,必须控制四象限整流器输入电压Uc与电源电压Us之间的相位与电源Us初相位偏移角φ,使电感线圈电压与整流器输入电压的非线性分量Uc*sinφ相互抵消,才能使主变输出端的电压Us和电流Is相位保持一致,使机车的功率因数为1.0,其矢量图如图8所示。
由于串联电感线圈的存在,并且四象限整流器釆用PWM调制技术,因此四象限整流器实质上是个升压斩波器。在交流电流正半周期内当V、X模块导通时,电网电源Us和直流电源Ud形成叠加效应,快速向电感线圈充电,当V、X有一个模块导通时,通过U、Y对应的续流二极管,电网电源Us继续对电感线圈进行充电;当V、X模块全部截至时,由于电感元件电流的连续性,电网电源和电感线圈电压叠加通过U、Y的续流二极管对中间直流电源进行供电,由于电感的叠加作用,可以使中间直流电源获得比电源最大整流电压更高的电压,具有升压整流的作用。同样在交流电流负半周期内,U、Y模块的作用与正半周V、X模块起到的作用相同。
和谐系列机车四象限整流器的工作原理是一样的,根据机车选用IGBT模块参数的不同,其工作参数也各有所不同。和谐1型机车IGBT模块最大开关频率250Hz,采用5倍频同步调制,最大输入电流1712A。和谐2型机车最大开关频率800Hz,采用15倍频同步调制,最大输入电流1699A。和谐3型机车最大开关频率450Hz,采用9倍频同步调制,最大输入电流966A。逆变器与四象限整流器采用相同的元件,具有较高的输出频率范围,分别是0-116Hz、0-141Hz和0-120Hz。最大输出电流分别为1566A、1900A和520A。由于开关原件受到开关损耗和冷却调件的影响,开关频率收受到限制,在机车中高速工作区段,一般采用同步脉冲调制方式。随着输出频率的降低,脉冲调制输出波形失真逐步增大,功率因数降低,稳定工作点的离散性也越来越大,工作状态变差。为了充分利用IGBT模块的开关频率,改善逆变器在低频率输出区段的波形,一般采用异步脉冲调制方式。
机车制动工况下变流器工作状态分析
根据交流牵引电机的特性曲线可以看出,在电机转速超过同步转速后,电机转子相对旋转磁场的运动方向发生改变,转差率变为负值,电机输出扭矩方向发生改变,电机进入动力制动状态。电机电流方向也发生改变,由流入电机变为流出电机,电机由电动机状态转为发电机状态运行。
对于牵引逆变器来说,其控制输出的相位、电压和频率控制与牵引工况是一样的,所不同的是输出电流的方向发生改变,并控制电机转差率为负值,使电机在稳定的工作范围以内工作。
对于四象限整流器来说,牵引工况下控制整流器输入电压Uc相位角滞后电网电源电压Us,能量流动电网流向变流器方向。在动力制动工况下,整流器输入电压Uc相位角变为超前电网电源电压Us,在同样的控制信号状态下,由于电压的相位发生变化,在交流电流正半周期内当控制信号加在V、X模块上时,由于模块两端的电位差反向,模块并不导通,电感线圈通过V、X模块对应的续流二极管对电网和中间直流环节放电。当控制信号加在U、Y模块上时,模块导通,直流电源Ud通过U、Y模块向电感线圈Ls及电网电源Us反向充电,当U、Y只有一个模块导通时,由于电感元件电流的连续性,电感线圈通过导通模块U(Y)和模块V(X)的续流二极管,继续对电网电源Us进行充电;同样在交流电流负半周期时,V、X模块的作用与U、Y模块在正半周起到的作用相同。
通过以上分析可以看出,在机车制动工况下,牵引逆变器输出电压的频率低于交流牵引电机转子的转动频率,电机在负转差率工况下运行,在交流电机转子内部产生感应电流的频率为f2-f1,电机工作在异步发电状态,发电频率为f2-(f2-f1)= f1,与逆变器输出频率和相位都相同,幅值大于逆变器输出,使逆变器工作电流反向,逆变器实际上工作在可控三相四象限整流器状态。而四象限整流器,由于控制基波相位超前于电网电压相位,四象限整流器交流端电流也同时发生反转变为向电网馈电,四象限整流器工作在可控逆变器状态。与牵引逆变器所不同的是,四象限整流器逆变工作的输出频率与电网频率相同,是固定不变的。
在和谐系列大功率交流电力传动机车动力传输系统中,交流牵引电机是动力输出的执行环节,机车动力与性能的控制是通过动态调整交流牵引电机实际工作点,以适应机车牵引特性的要求,并最大限度地利用牵引供电的能力。牵引变流器是电源与交流牵引电机之间的中间环节,把动力源与输出单元隔离开来,单独的进行控制,使交流变换控制的复杂问题得到简单化的处理。同理通过大电容的变流器中间直流储能环节把变流器的四象限整流器与逆变器隔离开,使整流器和逆变器的各种调节和变换都在中间直流环节保持稳定的电压下进行。四象限整流器调节的是输入电压与电网电压的相位关系,牵引逆变器调节的是输出电压与交流牵引电机转速的匹配关系,调节的主线是逆变器直流端输入输出的电流与整流器直流端输入输出的电流保持一致,也就是保持能量传输的动态平衡。牵引逆变器的控制基准参数是牵引电机的转动频率,四象限整流器的控制基准参数是中间直流环节的工作电流,由于中间直流环节电压保持恒定,四象限整流器的实际控制基准参数是牵引电机的输出功率的大小。通过这种方式,使机车性能控制满足重载牵引运输的需要,并使功率因数保持在1.0附近,最大限度地利用了电网的牵引供电能力。
(作者单位:大秦铁路股份有限公司湖东电力机务段教育科)
猜你喜欢
现代食品科技(2022年8期)2022-09-02
电子测试(2018年11期)2018-06-26
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
电测与仪表(2016年8期)2016-04-15
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年4期)2016-04-04
电源技术(2015年1期)2015-08-22
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年12期)2015-04-09
电测与仪表(2014年19期)2014-04-04
