混凝土泵车主动防倾翻控制技术
2016-12-12 09:58黄大为吴德志吴斌兴
中国工程机械学报 2016年4期
黄大为,万 梁,吴德志,吴斌兴,赵 鑫
(1.国家混凝土机械工程技术研究中心,湖南 长沙 410205; 2.中联重科股份有限公司,湖南 长沙 410205)
混凝土泵车主动防倾翻控制技术
黄大为,万 梁,吴德志,吴斌兴,赵 鑫
(1.国家混凝土机械工程技术研究中心,湖南 长沙 410205; 2.中联重科股份有限公司,湖南 长沙 410205)
基于混凝土泵车工作原理与负载特性,建立了整机力学模型.通过理论分析,得到了泵车的倾翻条件与安全工作区域,并设计了安全系数计算模型.通过支腿压力、开度等实时反馈信息,基于安全系数计算模型,搭建了泵车主动分级防倾翻控制系统,实现任意工况下泵车作业的稳定性判断,并根据安全系数大小对泵车的执行机构进行主动分级控制,有效防止泵车倾翻.样机验证结果表明:主动防倾翻控制系统可以实时掌控泵车的安全状态,在不同的安全等级下准确地对臂架等执行机构进行主动干预,确保施工安全.
混凝土泵车; 防倾翻; 主动控制; 安全系数
混凝土泵车是一种用于输送和浇筑混凝土的移动式工程机械,它可以将混凝土沿着输送管道连续泵送到施工现场,逐渐成为了工程施工中的关键设备[1].近年来随着泵车吨位的提高,倾翻力矩越来越大,汽车底盘本身的重量不足以平衡其倾翻力矩,故须对泵车工作时的稳定性进行跟踪监测,以防止倾翻.通常为获得较好的稳定性,泵车工作时的支腿要求完全展开.但由于施工场地的限制导致支腿跨距不能达到要求,或者机手操作失误,都可能引起整车的稳定性异常而发生倾翻事故.即使机手发现这种现象,由于采取措施到设备响应有一定的延时,故还是存在事故发生的风险.因此开发一种控制系统,实时监控整车的稳定状态,并根据倾翻风险等级主动干预执行机构,从而防止泵车倾翻是十分必要的.它实时 跟踪监测随车起重机的稳定性,当整机重心超出支承范围或支腿油缸压力小于某一最小值时,单片机系统发出控制指令使随车起重机变幅、回转等动作停止,并发出报警提示信号,确保整机的安全,防止发生倾翻事故[2].本文深入分析了混凝土泵车施工过程的负载特性,建立了整机力学模型,并提出了一种安全系数模型和分级控制策略,可以实时准确地评估整机的安全状态,预判危险的发生.基于风险等级及时主动地干预设备,控制执行机构有效地做出防倾翻的响应动作(如调整臂架姿态降低倾翻趋势或者紧急停止泵送等),以确保施工安全.
1 混凝土泵车的力学分析
以混凝土泵车的回转中心为坐标原点构建坐标系,车尾方向为x轴正,车左侧为y轴正,如图1所示.当混凝土泵车作业时,4个支腿将支承起整个设备(包含工作介质混凝土)产生的重力.即整机重力G等于各支腿支撑反力的累加值.
(1)式中:F1,F2,F3,F4为左前、右前、右后、左后4个支腿的支撑反力.
支撑反力可通过设置在支腿垂直油缸上压力传感器读数后换算得到.
如图1所示,倾翻线为支腿接触地面的中心连线.对于右侧、前方倾翻线,存在如下的力矩平衡
(2)
(3)
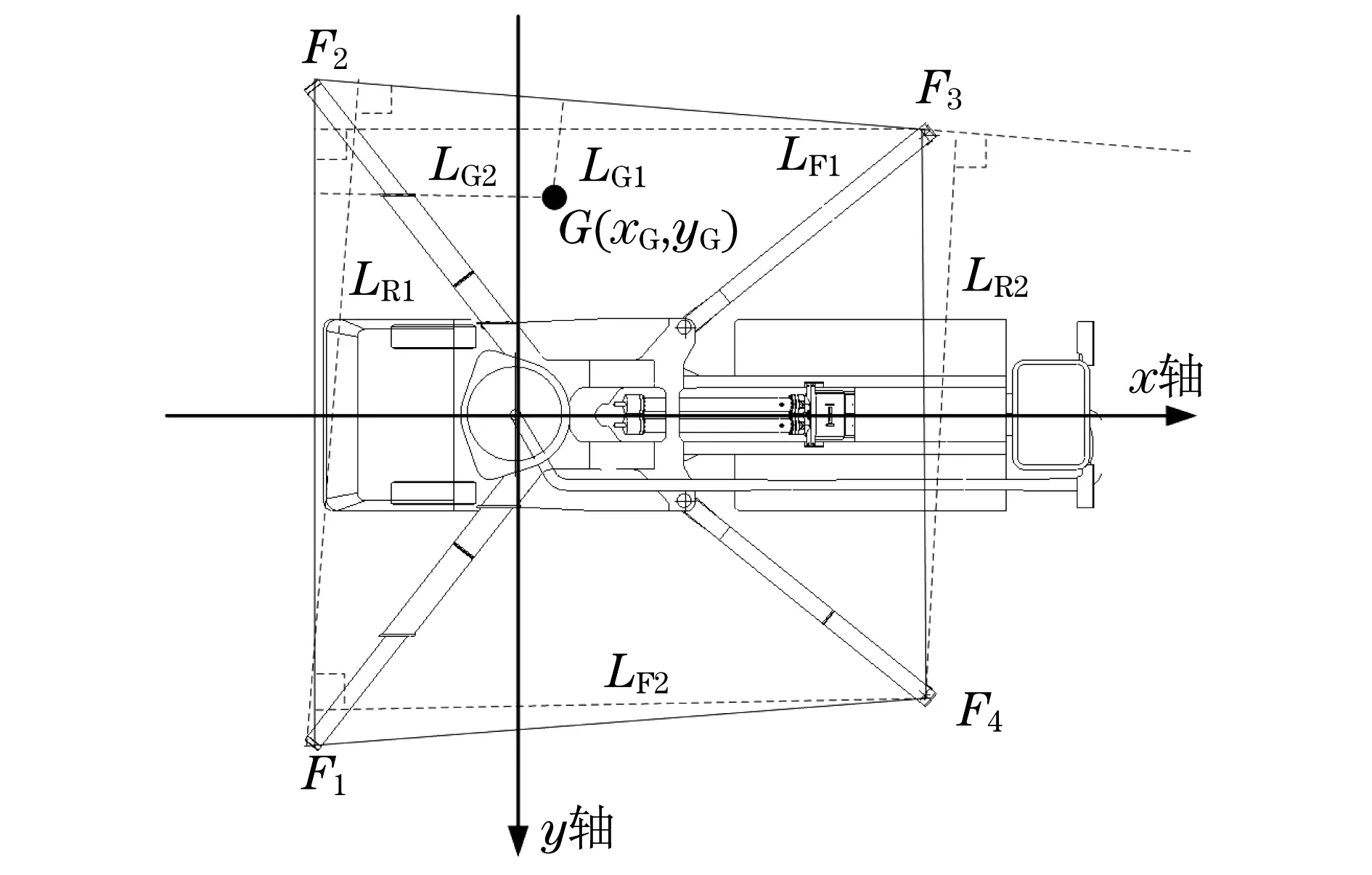
图1 力矩平衡示意图Fig.1 Schematic diagram of moment balance
式中:LG1,LG2为整机重心到右侧倾翻线、前方倾翻线的距离,边线确定后即距离确定;LR1,LR2为左前支腿、左后支腿到右侧倾翻线的距离,边线确定后即距离确定;LF1,LF2为右后支腿、左后支腿到前方倾翻线的距离,边线确定后即距离确定.
根据式(2),(3)可以求解LG1以及LG2,由LG1和LG2的值又可唯一确定整机重心的坐标G(xG,yG).

图2 力臂的几何求解示意图Fig.2 Schematic diagram of solution for arm of force 支腿到侧倾翻线的距离(即支腿反力的力臂)可采用如下的方法计算得到.以求解LR1为例,按照向量积公式
(4)式中:l1、l2为前方倾翻线、右侧倾翻线的向量表示;x1,y1,x2,y2,x3,y3为左前、右前、右后支腿的坐标值.同理,可依次计算出LR2,LF1和LF2的数值.
在LG1和LG2求解的情况下,通过式(4)可以建立重心坐标G(xG,yG)的二元二次方程组,如下所示:
(5)
各支腿的支撑点位置坐标可通过支腿上安装的位移传感器以及角度传感器实时测量得到.
2 安全系数计算模型
根据相关文献[3-4],定义整车安全系数S如下:
(6)
受泵送混凝土质量的影响,下车重力Gm和臂架重力GB以及臂架重心距离LB都是很难确定的,只有下车重心距离Lm是相对确定的,因而无法直接准确地计算出整车安全系数S.但是如图3所示,臂架,下车和整机之间存在着以下的力矩平衡关系:
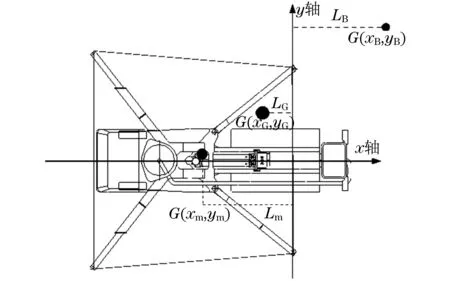
图3 安全系数模型示意图Fig.3 Schematic diagram of model for safety factor
Gmxm+GBxB=GxG
(7)
式中,xm,xB,xG为下车、臂架、整机重心的坐标值.
将坐标值换算成力臂的形式:
(8)
式中:LG为整机重心到后方倾翻线的距离.
同时,因整机重力等于臂架重力与下车重力之和:
(9)
将式(9)代入式(8),得到Gm和GB的关系式,再代入式(6)可以推导得到:
(10)
式中:a,b,s为求解表达式的绝对值.
由于在接近倾翻状态时,臂架重心距离远远大于整车重心距离,因此安全系数可简化为:
(11)
式中:S′为简化后的安全系数.
同理,可以计算出其他3条倾翻线对应的安全系数,取4个安全系数中最小者为当前的安全系数.
3 主动分级控制系统
混凝土泵车的主动防倾翻控制系统由传感器、控制器、比例阀等硬件以及力学分析模型与安全系数计算模型构成.具体工作原理如下:通过在支腿上安装位移传感器和角度传感器实时得到支腿的伸缩范围,从而计算出安全作业区域;通过在支腿上安装力传感器实时得到各个支腿的受力大小,从而计算出整车重心坐标及安全系数.控制器对安全系数与设定的各级安全系数阈值进行对比,根据泵车实时的安全等级对臂架等执行机构的运动进行主动干预控制,并在显示屏上实时显示安全等级等信息,从而确保泵车始终工作在安全区域,防止整车的倾翻,保证施工安全.控制策略如图4所示.其中T1,T2,T3分别为实时计算的安全系数,当安全系数大于T1时,不对臂架等执行机构进行主动干预;当安全系数小于T1、大于T2时,控制系统发出臂架慢档限制指令,即臂架在慢档对应的速度限制下运行,可能低于操作机手通过操作手柄发出的速度要求;当安全系数小于T2、大于T3时,臂架进行限速运动的同时,限制泵送速度;当安全系数小于T3时,泵车接近临界倾翻状态,限制臂架与泵送动作,臂架只能按照显示屏所提示的运动方向动作.
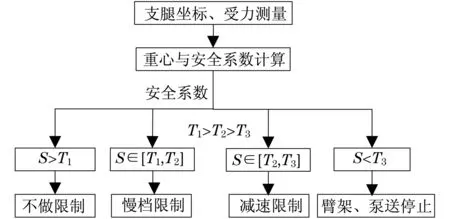
图4 主动分级控制策略示意图Fig.4 Schematic diagram of active hierarchical control strategy
4 试验
为验证混凝土泵车主动防倾翻控制系统的正确性,以某型号泵车进行试验验证.如图5所示,验证不同工况下主动防倾翻系统的运行情况.
工况1:将支腿全部展开,开度为100%,即全支撑工况.臂架完全展开,从0°顺时针回转到100°,整车重心轨迹及倾翻安全系数变化曲线如图6所示.从图6可以看出,全支撑工况下,重心坐标在全区域内,安全系数在1.23~2.15之间变化,臂架的运动没有导致混凝土泵车发生倾翻状态.
工况2:将左侧支腿开度设置为60%,右侧支腿仍然为100%,即非全支撑工况.臂架完全展开,从0°顺时针回转,直到臂架达到倾翻状态,整车重心轨迹及倾翻安全系数变化曲线如图7所示.从图7可以看出,非全支撑工况下,随着臂架的运动,重心坐标逐渐由安全区域向倾翻边界移动,安全系数逐渐减小到1.08,臂架的运动导致混凝土泵车由安全状态达到倾翻状态,验证了整车重心与安全系数计算模型的正确性.

图5 防倾翻试验Fig.5 Anti-rollover test
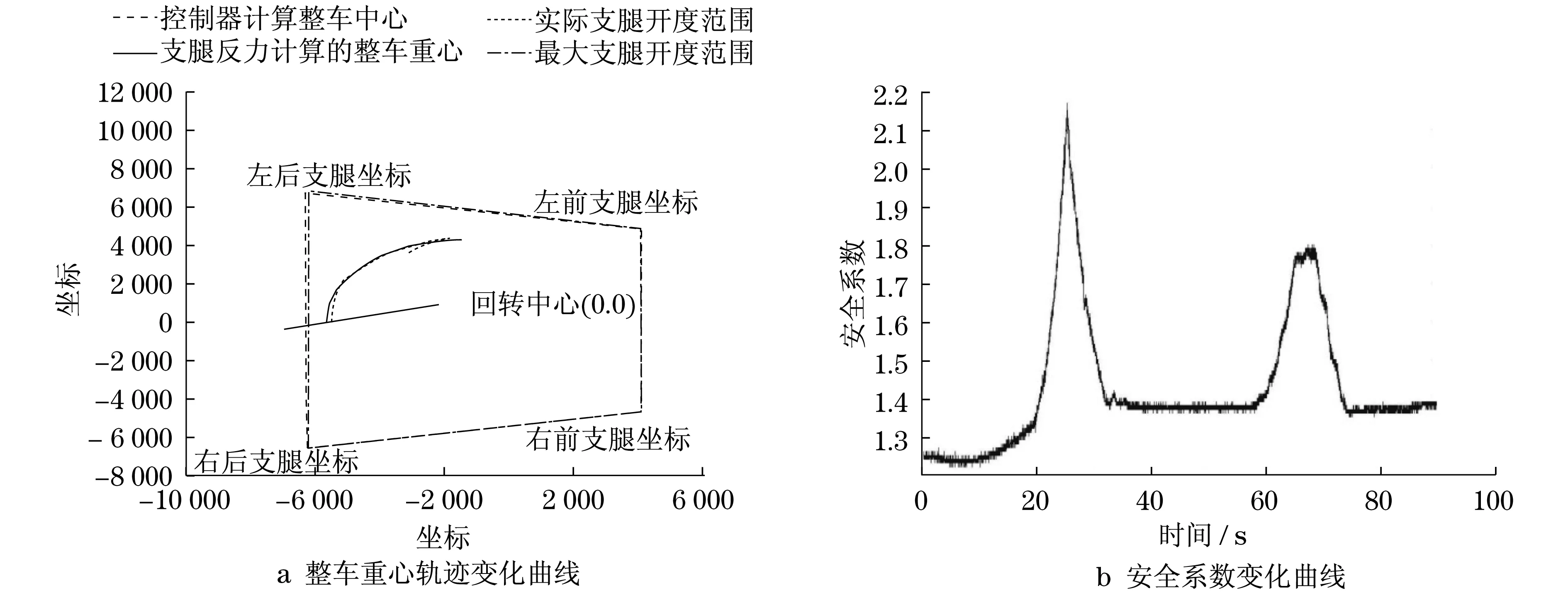
图6 全支撑工况Fig.6 Full support condition
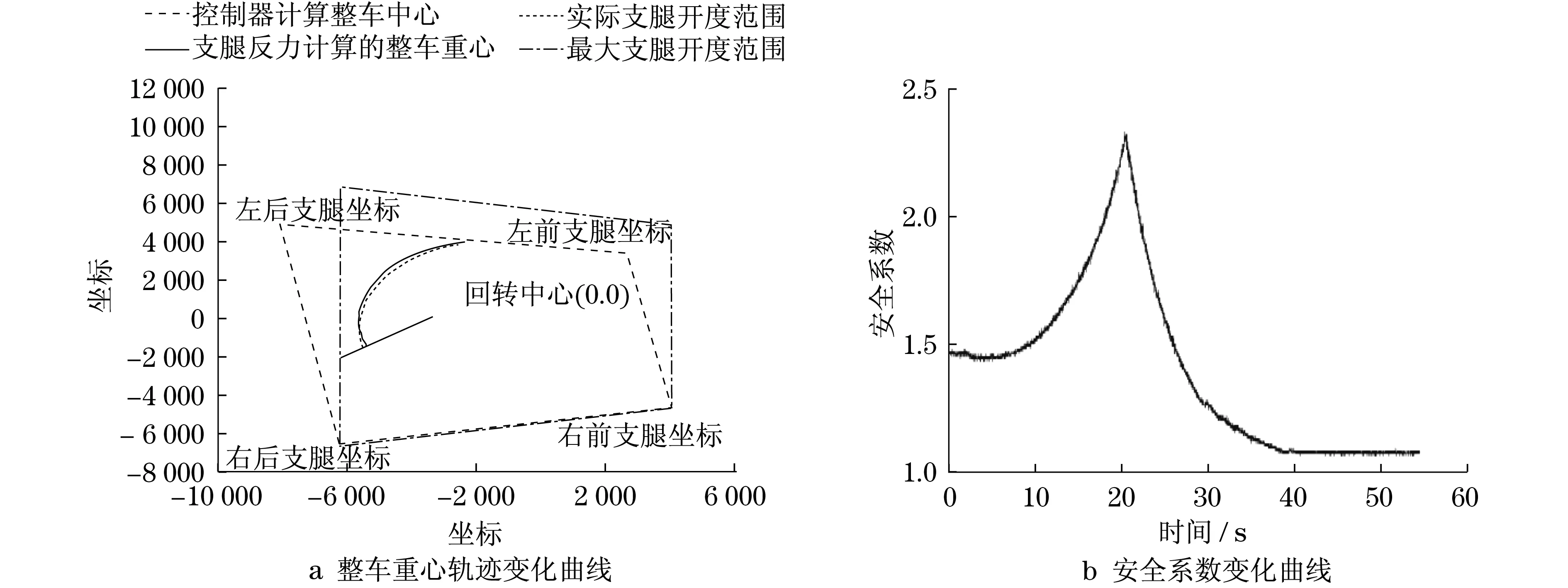
图7 非全支撑工况Fig.7 Non full support condition
混凝土泵车由安全状态逐渐变化为倾翻状态时,主动防倾翻控制系统将根据安全系数的大小输出臂架等执行机构限制运动的控制指令,避免泵车发生倾翻现象,并通过显示屏提醒操作人员,只有使整车重心远离倾翻风险区域的操作才能有效执行.
由图8可以看出,随着臂架运动,控制系统输出臂架的控制指令,整个过程为:臂架正常速度运行—臂架进行慢档模式运行—臂架进行锁臂模式运行.当臂架进入锁臂锁泵送模式下(即临界倾翻状态),只有逆向回转或举升第一节臂架的动作才能正常操作,确保整车重心远离倾翻危险区域.
(1) 图8a中,臂架回转过程中,同样控制量下,根据角度斜率变化可知,开始阶段臂架匀速转动,到达慢档区域时,臂架运动速度降低,直到锁臂状态时,臂架停止运动,回转角度不变;
(2) 图8b中,整车顺时针运动,先进入慢档状态,然后进入锁臂状态,此时臂架顺时针回转动作锁定.为了解锁进行逆时针回转动作,逆回转到一定角度解除锁臂,再逆回转到一定角度解除慢档动作,此时泵车臂架进入正常运动模式;
(3) 图8c中,臂架顺时针回转运动,当臂架进入锁臂状态时,顺时针回转锁定,逆时针回转没有锁定,可以进行逆时针运动进行整车解锁;
(4) 图8d中,当臂架进入锁臂状态时,一臂上的动作没有锁定,其他动作均锁定;可以通过举升第一节臂来进行整车解锁.
通过某型号泵车的试验验证可知,混凝土泵车主动防倾翻控制系统能够准确计算整车重心及安全系数,判断安全状态.且接近倾翻状态时,能够有效输出臂架等执行机构的限制运动指令,避免泵车出现倾翻现象,并提示操作者采取正确的操作方式,使泵车脱离倾翻危险区域,继续安全施工.
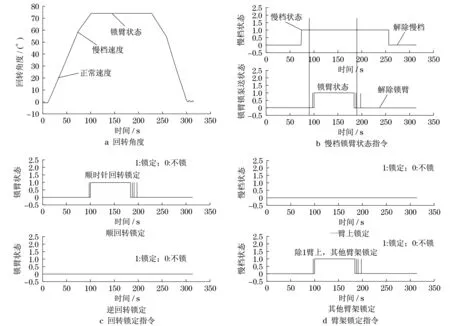
图8 主动分级控制示意图Fig.8 Schematic diagram of active hierarchical control
5 结论
本文提出了一种混凝土泵车防倾翻控制的方法,基于负载特性,建立了整机力学模型,通过力矩平衡分析,得到了泵车的倾翻条件与安全工作区域,并设计了安全系数计算模型.通过支腿压力、开度等实时反馈信号,搭建了泵车主动分级防倾翻控制系统,实现任意工况下泵车作业的稳定性判断,并根据安全系数大小对泵车的执行机构进行主动分级控制,有效防止泵车倾翻.采用某型号泵车进行试验验证,结果表明主动防倾翻控制系统可以实时掌控泵车安全状态,在不同的安全等级下准确地对臂架等执行机构进行主动干预,确保施工安全.
[1] 郑庆华,姚立娟,曾杨,等.混凝土泵车防倾翻技术研究[J].建设机械技术与管理,2013(4):75-77.
ZHENG Qinghua,YAO Lijuan,ZENG Yang,et al.Research on the anti-rollover technology for the truck mounted concrete pump [J].Construction Machinery Technology & Management,2013(4):75-77.
[2] 仇文宁,李清伟.随车起重机防倾翻装置数模构建及控制原理[J].煤矿机械,2011,32(5):76-77.
QIU Wenning,LI Qingwei.Construction and control principles for mathematical model for anti-overturning device on truck crane[J].Coal Mine Machinery,2011,32(5):76-77.
[3] 郑红.混凝土泵车的稳定性分析[J].本溪冶金高等专科学校学报,2001,3(3):17-23.
ZHENG Hong.Stability analysis of concrete pumping vehicle[J].Journal of Benxi College of Metallurgy,2001,3(3):17-23.
[4] 蒋玉杰,李景春,张国忠.支腿结构设计对混凝土泵车稳定性的影响 [J].建筑机械,2005,(3):67-68.
JIANG Yujie,LI Jingchun,ZHANG Guozhong.The effect of outrigger structure design on the stability of truck concrete pump[J].Construction Machinery,2005,(3):67-68.
Active anti-rollover control technology for concrete pump trucks
HUANG Da-wei,WAN Liang,WU De-zhi,WU Bin-xing,ZHAO Xin
(Chinese National Engineering Research Center of Concrete Machinery, Changsha 410205, China;Zoomlion Heavy Industry Science and Technology Co., Ltd., Changsha 410205, China)
Based on the operational principles and loading properties,a mechanical model is established for concrete pump trucks.Through theoretical analysis,the rollover conditions and safe working areas,along with safety factor calculation model,are obtained.Owing that the active rated anti-rollover control system is established via the feedback information of pressures and opening of outriggers,this system can estimate the truck stability under random conditions. By actively controlling the actuator on different hierarchies,the rollover can be effectively prevented using safety factors. Therefore,it is indicated from experimental results that the turnover can be actively and accurately prevented upon such actuators as booms in a real-time manner under different safety ratings.
concrete pump truck; anti-rollover; active control; safety factor
黄大为(1980-),男,工程师. E-mail:david0706@163.com
TB 53
A
1672-5581(2016)04-0352-06
猜你喜欢
湖南水利水电(2021年6期)2022-01-18
科学与财富(2021年35期)2021-05-10
中国工程机械学报(2019年6期)2019-12-31
质量技术监督研究(2018年1期)2018-03-26
进出口经理人(2016年15期)2017-05-10
制造业自动化(2017年2期)2017-03-20
专用汽车(2016年7期)2016-11-23
筑路机械与施工机械化(2015年5期)2015-06-15
商用汽车(2012年8期)2012-11-06