共轭梯度最小二乘迭代正则化算法在冲击载荷识别中的应用
2016-12-12 11:34卢立勤乔百杰张兴武陈雪峰
振动与冲击 2016年22期
卢立勤, 乔百杰, 张兴武, 陈雪峰
(1西安交通大学 机械制造系统工程国家重点实验室,西安 710049; 2中国船舶工业系统工程研究院,北京 100094)
共轭梯度最小二乘迭代正则化算法在冲击载荷识别中的应用
卢立勤1,2, 乔百杰1, 张兴武1, 陈雪峰1
(1西安交通大学 机械制造系统工程国家重点实验室,西安 710049; 2中国船舶工业系统工程研究院,北京 100094)
结构动载荷识别反问题是典型的病态问题,需要应用正则方法克服其病态特性而获得稳定的解。与直接正则化算法Tikhonov方法相比,共轭梯度最小二乘 (Conjugate Gradient Least Squares, CGLS) 迭代算法在载荷识别反问题的正则化过程有无须对传递矩阵求逆、无须明确正则化参数的优点。提出共轭梯度最小二乘迭代正则化算法和启发式迭代收敛终止准则,用于三自由度仿真模型和壳结构试验模型的冲击载荷识别,并与经典的Landweber迭代正则化算法和直接正则化算法Tikhonov方法比较。仿真和实验结果表明:CGLS迭代正则化算法在识别精度、收敛速度、计算效率和抗噪性方面有明显优势。
共轭梯度最小二乘算法;Landweber算法;冲击载荷识别;正则化
机械结构动载荷识别在结构健康监测、可靠性分析和振动主动控制等领域中起着关键性作用[1-2]。在工程实际中,如飞机机翼、风力发电机叶片等复合材料结构易遭受到外来物的冲击而产生缺陷[3]。然而,受安装空间所限,目前技术难以对作用于结构的外载荷直接测量或计算。因而人们不得不研究间接的载荷测量方法。载荷识别作为结构动力学的第二类反问题,是一个典型的病态问题,需要用正则化方法来克服载荷识别反问题的病态特性。
一般来说,载荷识别正则化方法分为频域法和时域法。经典的频域载荷识别方法,需要在各个频点对频响函数矩阵求逆,且对低频、冲击载荷识别精度较低[4]。时域载荷识别方法不同于传统的频域法,根据载荷与系统传递函数之间的卷积关系,通过解卷积获取载荷的时域离散信号,能够处理瞬态信号,因而可实现冲击载荷的识别[5-6]。目前广泛应用的求解反问题的正则化方法有截断奇异分解、Tikhonov、迭代以及基函数展开等方法[7]。迭代正则化算法如Landweber和共轭梯度迭代正则化算法不同于截断奇异值分解、Tikhonov正则化方法,有不涉及传递矩阵求逆运算和不需要明确正则化参数的优点,迭代过程即是正则化的过程,而被广泛应用在反问题求解中,但在载荷识别中的应用较少。
近二十年来,冲击载荷识别作为反问题得到广泛的关注。GHAJARI等[8]将神经网络技术用于识别作用在复合材料板的冲击力。然而,训练神经网络需要大量的样本数据,这在实际应用中往往是不可实现的。LI等利用小波多分辨率的特性,重构作用于简单梁结构的简谐和冲击载荷。QIAO等应用三次B样条尺度函数和三次B样条函数逼近作用在悬臂梁、壳结构的冲击载荷[9]。王林军[10]将改进的Tikhonov正则化方法用于识别不同类型的动载荷,仿真算例表明优于Tikhonov正则化方法。然而,上述基函数展开法为了逼近动载荷需要确定基函数数目。常晓通等将Landweber迭代算法应用于桥梁模型的载荷识别,仿真结果表明识别精度可以满足工程要求的稳定近似解[11]。共轭梯度最小二乘迭代(Conjugate Gradient Least Squares, CGLS)算法是在共轭梯度(Conjugate Gradient, CG)算法的基础上,用于求解非对称和非正定系统方程[12]。CGLS作为一种高效的迭代正则化算法已经被用在医学成像[13]、数值传热学[14]等领域。
本文将CGLS迭代正则化算法应用于三自由度仿真模型和壳结构试验模型的冲击载荷识别中,并与经典的Landweber迭代正则化算法作对比。然而,CGLS迭代正则化算法属于“半收敛”算法,即随着迭代步数的增加其解快速逼近最优解,然后再逐渐偏离最优解。为此,本文给出了CGLS迭代算法的启发式迭代收敛终止准则,可以最大精度的确定最优迭代步数。
1 载荷识别反问题模型


(1)
式中,y(t)为系统响应,如加速度、速度、位移和应变等物理量,f(t)为激振力。传递函数h(t)表征机械系统输入与输出的数学关系,也就是系统的单位脉冲响应函数。式(1)描述的是一个正问题,即已知系统激励和传递函数求响应。对于结构健康监测,需要应用反问题分析方法来确定作用在结构上的未知激振力。由于实际测量的数据为离散数据,在计算中,需要先将连续的问题(1)进行离散处理:
(2)
式中,Δt为时间采样步长,N为采样点数。进一步,式(2)可以用矩阵和矢量写成如下的紧凑形式:
Hf=y
(3)
式中,待识别载荷向量f∈RN,系统响应向量y∈RN。传递矩阵H∈RN×N是一个具有Toeplitz结构的下三角矩阵。由于传递矩阵H条件数很大,且实际测量的响应信号y总是包含噪声,导致很小的干扰就可以产生巨大的求解偏差。因此,载荷识别是典型的病态问题,直接对式(3)中的传递矩阵H求逆是不合适的。病态问题的上述特征并不意味着病态问题不可解,而是传统的线性代数的方法如高斯消去法、LU、QR分解法等无法直接应用于此类问题的求解。为使所求解有意义,一般借助正则化技术来获得近似解。
2 迭代正则化算法
迭代正则化算法是按照某种规则构造一组向量序列fm,使其为式(3)的较精确的近似解。迭代正则化算法具有以下优点:迭代过程无须明确正则化参数,其迭代步数就有正则化的效果,且无须对矩阵进行求逆运算。本文着重研究Landweber和CGLS两种迭代正则化算法在载荷识别中的应用,并与经典的Tikhonov正则化方法比较。
2.1 Landweber迭代算法
Landweber迭代正则化算法的基本格式:
fm=fm-1+ωHT(y-Hfm-1)
(4)

2.2 CGLS迭代算法
CGLS是由CG算法发展而来。CG适用于良态(Well-Conditioned)系统,此时系统矩阵是对称的且非奇异的,导致CG具有良好的收敛性。CGLS是求解大维数病态系统的优秀迭代算法,此时系统矩阵可以是非对称和奇异的。然而,当CGLS求解病态反问题时,其收敛呈现出“半收敛”特性,即随着迭代步数的增加其解快速逼近最优解,然后逐渐偏离最优解。因此,如何及时确定CGLS迭代步数进而获得正则化解是非常重要。实际上,精确的预测CGLS的迭代步数是非常困难的。
CGLS迭代正则化算法的基本思想是将共轭梯度法应用于求解下面的最小值问题:
(5)
由于CG迭代算法要求传递矩阵H是对称正定的,对式(3)两边乘以HT,获得正规方程:
HTHf=HTy
(6)
此时系数矩阵A=HTH是对称正定的。共轭梯度法用来求解非对称问题,获得正规方程,称为共轭梯度最小二乘法。CGLS迭代算法的基本流程如下:
初始化:f0=0,r0=y-Hf0,d0=HTr0,m=1

(7)
步骤 2fm=fm-1+αmdm-1
(8)
步骤 3rm=rm-1-amHdm-1
(9)
(10)
步骤 5dm=HTrm+βmdm-1
(11)
m=m+1
(12)
式中,m为迭代步数,αm为迭代步长,rm为残差向量,βm为共轭系数,dm为迭代搜索方向。可知,CGLS迭代过程中仅仅涉及到矢量与矩阵H或者HT的乘积运算,迭代步数m扮演着正则化参数的角色。每次迭代结果fm都可以认为是一个正则化解,即将原来的系数矩阵A=HTH投影到较小的m维子空间进行计算得到。
值得注意的是CGLS迭代算法是半收敛算法,不合适的迭代步数易造成“过估计”或“欠估计”。因此,在迭代过程中,迭代步数m的选取非常重要。当测量响应的噪声信息可知的情况下,偏差准则(Discrepancy Principle)可以用来确定迭代步数。然而在实际应用中,噪声信息是不可获取的。HANKE提出了CGLS的启发式迭代终止准则,并应用在解决图像重构反问题中。其研究结果表明,启发式终止准则确定的正则化解稍微小于最优正则化解。而在实际应用中,这种微小差距是可以忽略的。
本文将CGLS和启发式迭代收敛终止准则应用到载荷识别反问题领域。构造如下的启发式迭代终止准则的目标函数:
(13)

(14)
3 仿真算例:三自由度系统冲击载荷识别
为了评价所提方法相对已有载荷识别方法在计算精度、计算速度和抗干扰性方面的优势,首先,一个三自由度仿真模型(见图1)被采用。除了本文介绍的两种迭代正则化方法,作为被广泛应用的Tikhonov正则化方法也将用来识别冲击载荷。其中,Tikhonov方法的正则化参数由交叉检验准则确定。关于Tikhonov和交叉检验准则的介绍,可参考文献[7]。
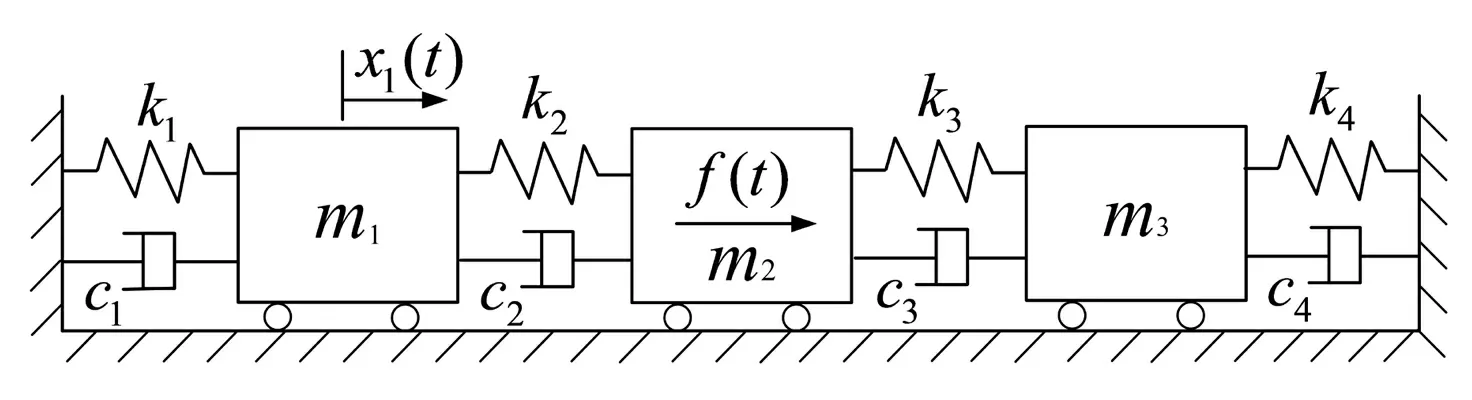
图1 三自由度系统冲击载荷识别Fig.1 The three-degrees-of-freedom system applied for impact load identification
为了定量评价两种迭代算法以及Tikhonov正则化方法所识别载荷的精度,定义真实载荷和正则化载荷间的相对误差为:
(15)
式中,fexact和fidentified分别为真实载荷和正则化算法识别的载荷。对于冲击载荷识别而言,冲击载荷的峰值力是结构健康监测一个重要指标,定义峰值相对误差为:
(16)
3.1 问题描述
用于冲击载荷识别的三自由度弹簧-质量-阻尼系统仿真模型如图1所示。仿真参数设置如下:四个弹簧刚度系数k1=k4=32 000 N/m和k2=k3=16 000 N/m;三个点质量m1=m2=m3=1 kg;四个阻尼系数c1=c4=100 Ns/m和c2=c3=50 Ns/m。对于离散点质量系统,其系统控制方程如下:

f(t)=e(-10 000π(t-0.2)2)
(18)
点质量m1的位移响应,用来反演作用在点质量m2的冲击力f(t)。仿真时间为1s,采样频率为2 500 Hz, 传递矩阵H维数为2 500。计算环境为Matlab (R2012a)、Win7 32位、内存4G和CPU i5-3450。系统响应由Newmark算法实现。首先,令f(t)=δ(t),应用Newmark算法计算得到离散的脉冲响应函数h(t),进而获得传递矩阵H。传递矩阵的条件数高达3.26E+007,表明该载荷识别反问题是严重病态的。
考虑到噪声是载荷识别无法回避的,一个服从均匀分布的随机噪声被添加到位移响应中,即:
yδ=y+e=y+εstd(y)η
(19)
式中,yδ为含噪声响应数据,y为Newmark算法计算得到的响应数据,e为白噪声,η为服从区间(-1,1)均匀分布的伪随机数,std(y)为真实响应的标准方差。研究不同噪声水平下三种正则化方法的载荷识别精度,噪声水平ε分别设定为5%, 10% 和20%。值得注意的是:除了人为添加的白噪声之外,响应数据中还包含Newmark的数值计算误差。
3.2 分析与讨论
以噪声水平10%为例,图2显示了CGLS和Landweber (LW) 迭代过程。其中CGLS的最大迭代步数为50,Landweber最大迭代步数为200。Tikhonov(Tikh)方法的可选正则化参数数目为200。从图2(a)可知,CGLS的启发式终止准则在第22步达到最小,随后缓慢上升;从图2(b)可知,CGLS的迭代过程的相对误差在第26步达到最小值,随后缓慢上升,符合“半收敛”迭代算法特点,而Landweber迭代算法在200步内尚未收敛。经过反复计算,本算例Landweber算法在500步左右趋向收敛。CGLS的收敛速度远快于Landweber方法。对比图2(a)和图2(b),可知启发式终止准则可以用来确定CGLS的正则化迭代步数。
三种正则化方法的识别结果如图3所示。在冲击载荷的加载区,三种方法的识别结果均可以与真实载荷吻合,而在非加载区,CGLS和Landweber优于Tikhonov方法。而从图中很难辨认哪一种方法精度更高。表1列举了三种噪声水平下,CGLS、Landweber和Tikhonov三种正则化方法的比较结果。将真实载荷作为参考,利用式(15)可以计算每个迭代步的相对误差,其中最小相对误差和对应的峰值误差和迭代步数可确定。从表1可知,随着噪声程度的增加,三种方法的识别精度都在下降,且正则化迭代步数也有不同程度下降。比较三种噪声水平识别结果,CGLS的最小相对误差和峰值误差均低于其他两种方法;而Landweber优于Tikhonov方法。当考虑正则化准则时,CGLS的正则化相对误差和峰值误差亦均低于其他两种方法;而Landweber亦优于Tikhonov方法。比较三种方法的计算时间,可知GCLS远远小于其他两种方法。同时,CGLS识别结果的最小相对误差和正则化相对误差相差很小,且迭代步数相差亦不大,因此,启发式终止准则可以用来确定CGLS迭代算法的正则化代步数。
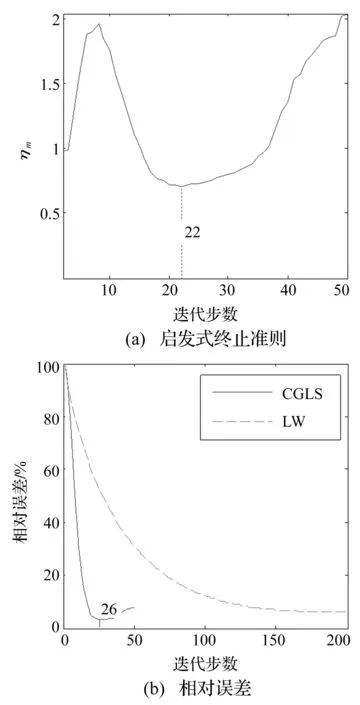
图2 在噪声水平10%情况下,CGLS和Landweber迭代过程Fig.2 The iteration history of CGLS and Landweber with the noise level 10%

图3 在噪声水平10%情况下,CGLS、Landweber和 Tikhonov正则化方法的载荷识别结果对比Fig.3 Comparison of the identified forces by CGLS, Landweber and Tikhonov regularization methods under the noise level 10%表1 不同噪声水平下,CGLS、Landweber 和Tikhonov正则化方法对比Tab. 1The comparison among CGLS, Landweber and Tikhonov regularization methods with different noise levels
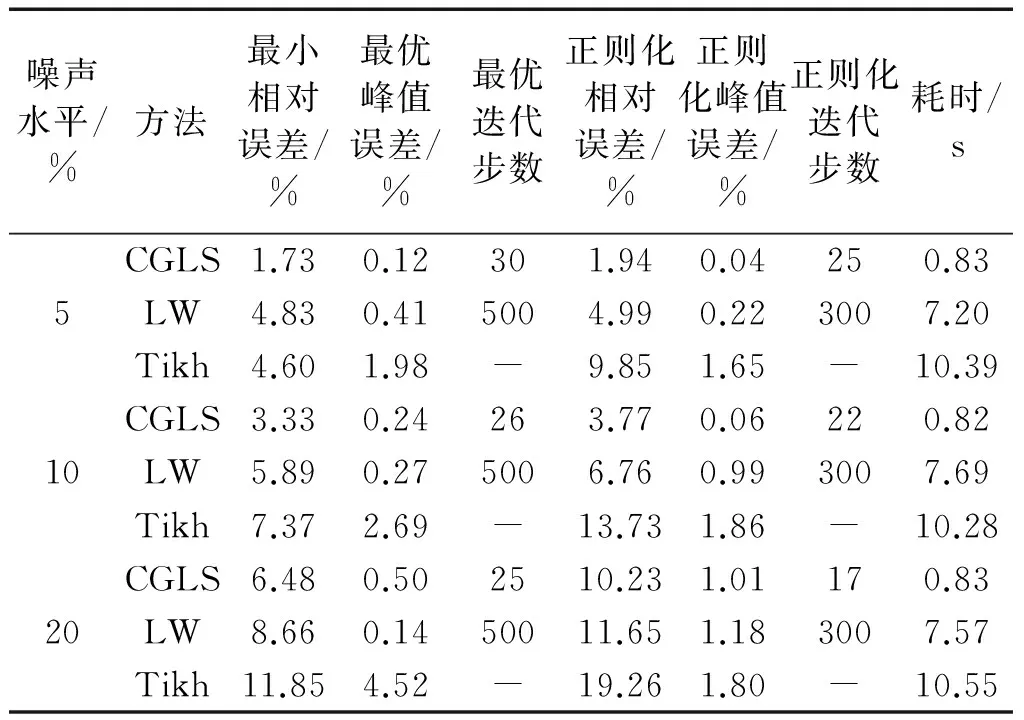
噪声水平/%方法最小相对误差/%最优峰值误差/%最优迭代步数正则化相对误差/%正则化峰值误差/%正则化迭代步数耗时/sCGLS1.730.12301.940.04250.835LW4.830.415004.990.223007.20Tikh4.601.98-9.851.65-10.39CGLS3.330.24263.770.06220.8210LW5.890.275006.760.993007.69Tikh7.372.69-13.731.86-10.28CGLS6.480.502510.231.01170.8320LW8.660.1450011.651.183007.57Tikh11.854.52-19.261.80-10.55
4 试验验证:壳结构冲击载荷识别
4.1 壳结构冲击载荷试验介绍
选择一端自由一端固定的壳结构作为冲击载荷识别的试验对象。敲击点和加速度传感器布置如图4所示。悬臂壳结构材料为45钢,其几何尺寸为圆心角90°、长500 mm、半径200 mm、厚5 mm。物理参数为弹性模量210 Gpa、泊松比0.31、密度7 850 kg/m3。悬臂壳结构的前三阶固有频率分别为19 Hz、201 Hz和374 Hz。型号为PCB 086C01(灵敏度 12.37 mV/N)冲击力锤作用于F点,其锤击端内嵌力传感器可以保证实时测量冲击力大小,作为参考信号计算识别载荷的相对误差。安装于R点的加速度传感器(PCB 333B32 100 mV/g),实时测量冲击响应。冲击试验时,加速度信号和力信号由LMS SCADASIII数据采集系统同步记录,采样频率为2 048 Hz。载荷识别过程分为三个基本步骤:测量系统传递函数、测量系统响应数据和应用正则化方法识别未知动载荷。
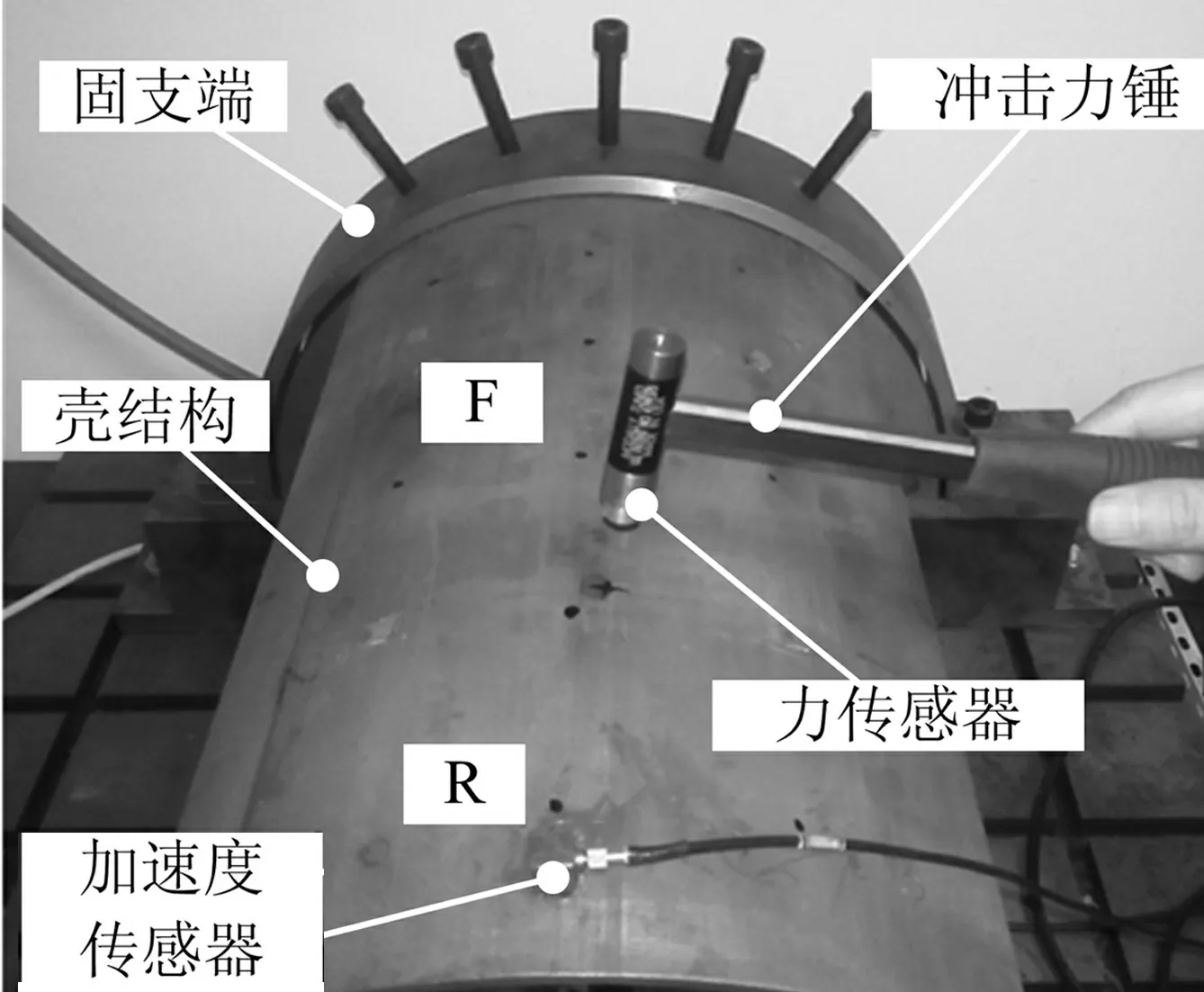
图4 壳结构冲击载荷识别Fig.4 The shell structure applied for impact load identification
精准地建立系统传递函数对精确地识别动载荷是至关重要的。机械系统的传递特性可通过解析法[16]、数值法以及试验法获取。其中,模态试验测试频响函数,可适用于各类复杂的机械结构,且较为成熟,可操作性强。模态试验有锤击法和激振器激励法两种,其中锤击法更加便于操作。首先,应用脉冲力锤在激励点F处连续锤击五次,同时由加速度传感器测量响应点R处加速度信号,由LMS IMPACT模块获得每次锤击的频响函数,取值五次平均,获得激励点与响应点的平均频响函数。其次,对LMS数据采集系统得到频响函数进行快速逆傅里叶变换,得到单位脉冲响应函数。最后,通过离散的脉冲响应函数h(t)获得传递矩阵H。
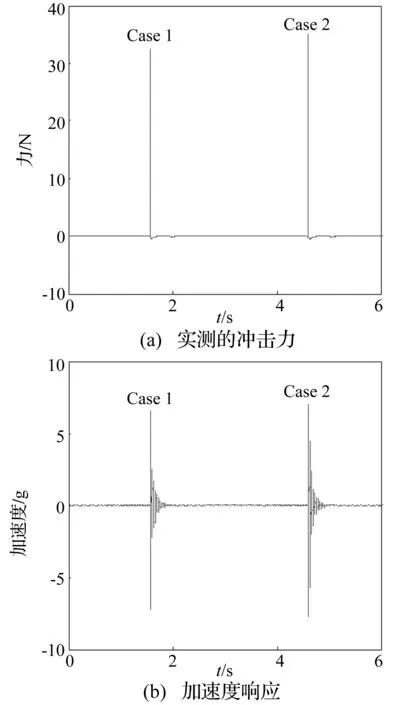
图5 力传感器和加速度传感器实测数据Fig.5 The measured data by the force transducer and accelerometer
测量冲击响应时,力锤连续敲击壳结构F点两次,分别标记为Case 1和Case 2,且每次冲击都是在前次冲击响应彻底衰减后再施加。由嵌入力锤的力传感器和贴在结构表面的加速度传感器测的信号如图5所示。可以看到冲击力信号是一个尖锐的脉冲信号,加速度响应信号是一个快速振荡衰减的信号。最后,由加速度响应和传递矩阵,运用CGLS和Landweber两种迭代算法以及经典的Tikhonov方法获得正则化解。为了应用正则化算法识别每次冲击载荷,在每次冲击事件中,截取的数据长度为 2 050,即冲击持续时间为1 s。CGLS总迭代步数均设置为1 000步,Landweber迭代步数分为5 000和30 000步两种。Tikhonov方法的可选正则化参数数目仍旧为200。
4.2 分析与讨论
由试验模态计算获得的传递矩阵H条件数高达9.40E+018,表明壳结构载荷识别反问题是严重病态的。在此,利用CGLS、Landweber和Tikhonov正则化算法识别作用于壳结构的冲击载荷。图6是CGLS迭代算法的启发式终止准则的收敛图,可知Case 1和Case 2分别需要273和333步迭代获得正则化解。图7显示了利用CGLS迭代算法重构的两次冲击事件的正则化结果f273和f333,可以看出重构的结果与实测的载荷结果一致,特别是在最大冲击力附近,峰值相对误差仅为5.98%和2.92%。
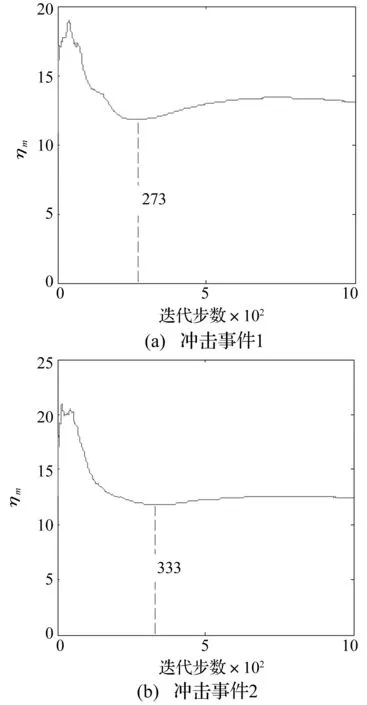
图6 启发式终止准则在CGLS正则化算法中应用结果Fig.6 The heuristic stoppong criterion applied for CGLS iteration regularization algorithm
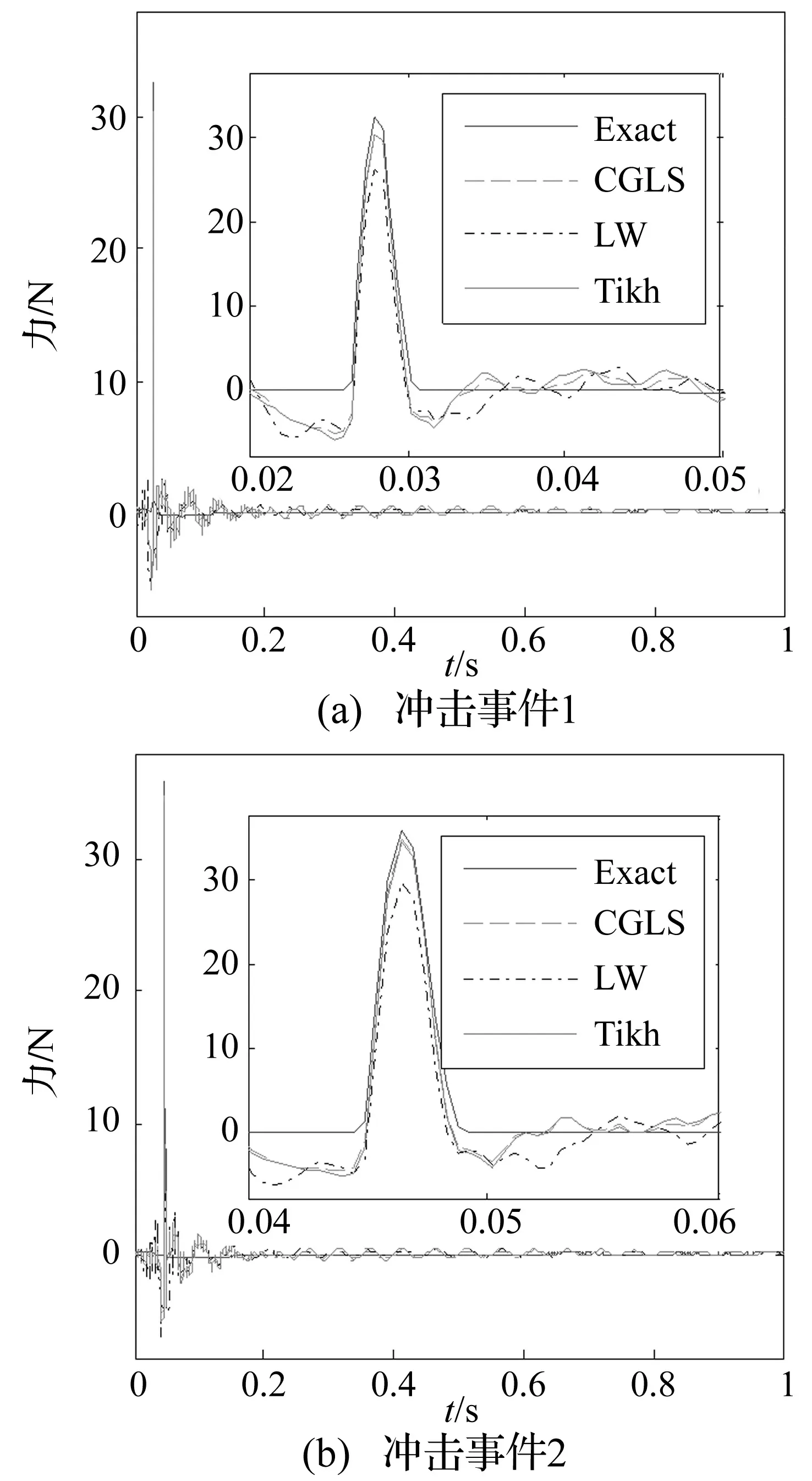
图7 CGLS、Landweber和Tikhonov 正则化方法的载荷识别结果对比Fig.7 Comparison of the impact loads identified by CGLS, Landweber and Tikhonov regularization methods
将实测载荷作为参考,利用式(15)可以计算每个迭代步的相对误差,由图8可知两次冲击的最小相对误差的迭代步数分别是282和375。从表1可知,两次冲击的CGLS相对误差分别为36.63%和32.14%,迭代过程中最小相对误差分别为36.60%和31.82%。可知启发式终止准则确定的正则化解非常接近于迭代过程中的最小相对误差对应的最优解,因此将启发式终止准则用来确定CGLS算法的迭代步数是可行的。两次冲击事件中,Case 1识别过程中需要282次迭代获得最小相对误差36.60%,而Case 2需要375次迭代次数得到最小相对误差31.82%。
下面,比较CGLS、Landweber和Tikhonov三种正则化算法的载荷识别性能。从图8可知,在1 000步内,CGLS相对误差快速下降然后缓慢上升,符合“半收敛”迭代算法特点,而Landweber相对误差一直缓慢下降,且在5 000步内尚未收敛。在5 000步时,两次冲击事件的Landweber解的相对误差分别46.52% 和46.04%,峰值相对误差分别为19.20%和17.31%。CGLS迭代1 000步需要的时间为10 s左右,而Landweber迭代5 000步需要27 s左右。实际上,本文中的两次冲击事件应用Landweber算法5 000步之后收敛变得非常缓慢,在30 000步尚未达到和CGLS相同的识别精度。两次冲击事件的Landweber解在30 000步时的相对误差分别37.60%和33.36%,峰值误差为6.65%和4.75%。而迭代30 000步,Landweber需要耗费的时间高达214 s。可知,Landweber相对CGLS迭代算法收敛速度非常慢,且识别精度低于CGLS。进一步比较两种迭代算法与Tikhonov正则化方法,从表2中可知,Tikhonov的最小相对误差和最优峰值误差均大于其他两种方法。值得注意的是,Tikhonov的正则化相对误差和正则化峰值误差大于CGLS而小于Landweber,且其所需的时间亦大于CGLS而小于Landweber。
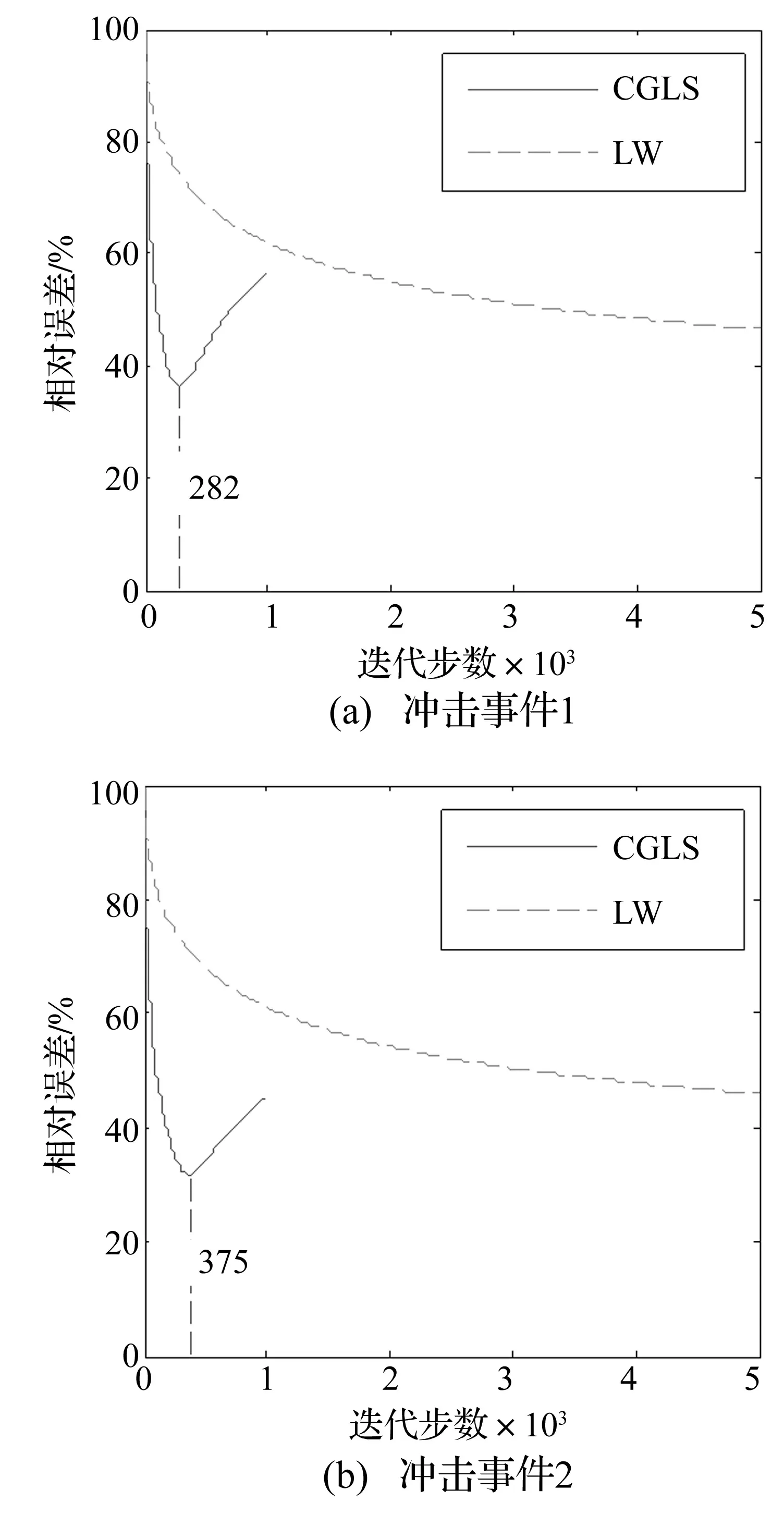
图8 CGLS和Landweber两种正则 化迭代算法随迭代步数的相对误差Fig.8 The relative error of iteration histories of both CGLS and Landweber iteration regularization algorithms
比较三自由度仿真模型和壳结构试验模型,可知后者的系统矩阵更加病态,CGLS在两种模型中均优于其他两种载荷识别方法。
5 结 论
本文提出利用CGLS迭代正则化算法识别作用于三自由度仿真模型和壳结构试验模型的冲击载荷,并与其他载荷识别方法比较,得到以下结论:
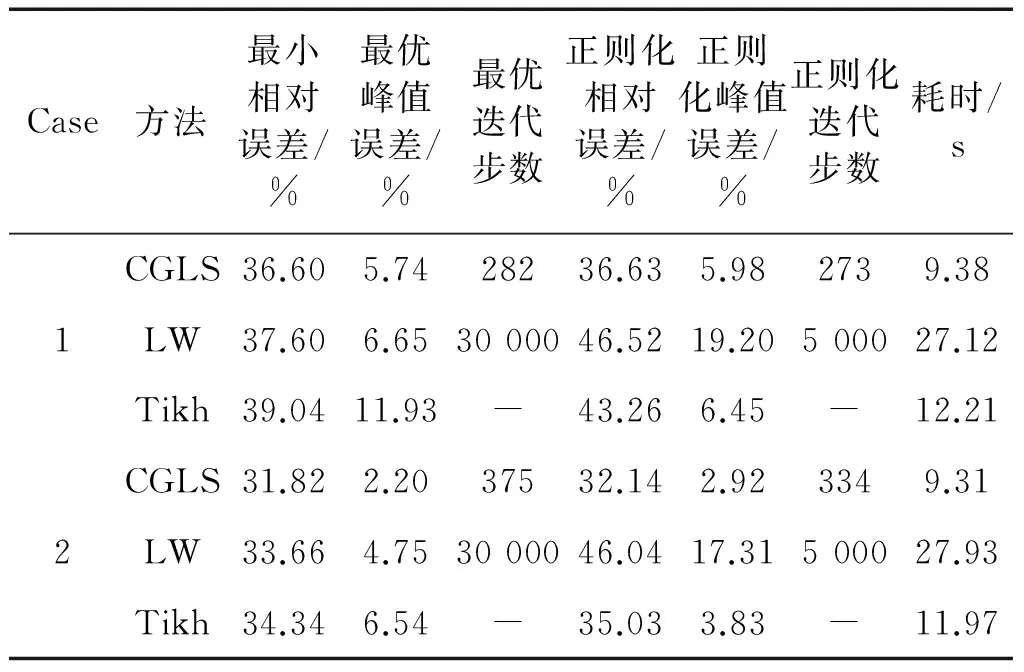
表2 两个冲击事件下, CGLS和Landweber迭代算法对比结果Tab.2 The comparison between CGLS and Landweber iteration regularization algorithms with two impact cases
(1)CGLS迭代正则化算法结合启发式终止准则可以高精度重构作用于三自由度仿真模型和壳结构试验模型的冲击载荷;
(2)测试响应数据误差越小,CGLS正则化算法需要的迭代步数越多,且收敛速度越慢;
(3)与传统的Landweber迭代正则化算法和直接正则化算法Tikhonov方法相比,CGLS迭代正则化算法识别精度高、收敛速度快、计算效率高和抗噪性能强。
[1] 乔百杰, 赵彤, 陈雪峰. 功率流测量以及振动能量参数估计试验研究 [J].振动与冲击,2014, 33(7):194-197. QIAO Baijie, ZHAO Tong, CHEN Xuefeng. Tests for power flow measurement and vibrational energy estimation [J]. Journal of Vibration and Shock, 2014, 33(7):194-197.
[2] QIAO B J, ZHAO T, CHEN X F, et al. The assessment of active vibration isolation performance of rotating machinery using power flow and vibrational energy: experimental investigation [J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2016,230(2):159-173.
[3] 郝扣安, 王振清, 周利民. 不同铺层厚度复合材料的低速冲击特性与损伤模式研究 [J]. 应用数学和力学, 2013, 34(7):661-671. HAO Kouan, WANG Zhenqing, ZHOU Limin. Impact behaviors and damage modes of composites under low-velocity impact with different layup thicknesses [J]. Applied Mathematics and Mechanics, 2013, 34(7): 661-671.
[4] 张磊, 曹跃云, 杨自春, 等. 总体最小二乘正则化算法的载荷识别 [J].振动与冲击,2014, 33(9):159-164. ZHANG Lei, CAO Yueyun, YANG Zichun, et al. Load identification using CG-TLS regularization algorithm [J]. Journal of Vibration and Shock, 2014, 33(9):159-164.
[5] LI Z, FENG Z P, CHU F L. A load identification method based on wavelet multi-resolution analysis [J]. Journal of Sound and Vibration, 2014, 333(2):381-391.[6] QIAO B J, ZHANG X W, LUO X J, et al. A force identification method using cubic B-spline scaling functions [J]. Journal of Sound and Vibration, 2015, 337: 28-44.
[7] ASTER R C, BORCHERS B, THURBER C H. Parameter estimation and inverse problems [M]. Academic Press, 2013.
[8] GHAJARI M, KHODAEI S Z, ALIABADI M H. Impact detection using artificial neural networks [J]. Key Engineering Materials, 2012, 488(3): 767-770.
[9] QIAO B J, CHEN X F, XUE X F, et al. The application of cubic B-spline collocation method in impact force identification [J]. Mechanical Systems and Signal Processing, 2015, 64: 413-427.
[10] 王林军. 正则化方法及其在动态载荷识别中的应用 [D]. 长沙:湖南大学, 2011.
[11] 常晓通, 闫云聚, 刘鎏. Landweber 迭代正则化方法在动态载荷识别中的应用 [J]. 应用数学和力学, 2013,34(9): 948-955. CHANG Xiaotong, YAN Yunju, LIU Liu. Applications of Landweber iteration regularization method in dynamic load identification [J]. Applied Mathematics and Mechanics, 2013, 34(9): 948-955.
[12] HANKE M. Conjugate gradient type methods for ill-posed problems [M]. CRC Press, 1995.
[13] RUBK T, MEANEY P M, MEINCKE P, et al. Nonlinear microwave imaging for breast-cancer screening using Gauss-Newton’s method and the CGLS inversion algorithm [J]. Antennas and Propagation, IEEE Transactions on, 2007, 55(8): 2320-2331.
[14] HUANG C H, WANG S P. A three-dimensional inverse heat conduction problem in estimating surface heat flux by conjugate gradient method [J]. International Journal of Heat and Mass Transfer, 1999, 42(18): 3387-3403.
[15] KALTENBACHER B, NEUBAUER A, SCHERZER O. Iteration regularization methods for nonlinear ill-posed problems [M]. Walter de Gruyter, 2008.
[16] QIAO B, CHEN X, LUO X, et al. A novel method for force identification based on the discrete cosine transform [J]. ASME Journal of Vibration and Acoustics, 2015, 137: 051012.
Application of conjugate gradient least squares iteration regularization algorithm in impact load identification
LU Liqin1,2, QIAO Baijie1, ZHANG Xingwu1, CHEN Xuefeng1
(1. The State Key Laboratory for Manufacturing Systems Engineering, Xi’an Jiaotong University, Xi’an 710049, China;2. Systems Engineering Research Institute, Beijing 100094, China)
Regularization methods should be developed to overcome the ill-posedness of inverse problem of structural dynamic load identification for getting a stable solution. The conjugate gradient least squares (CGLS) iterative regularization algorithm has several advantages over direct regularization methods such as the Tikhonov method on solving inverse problems: the inversion of matrix is not required, and no explicit regularization parameter is required. A CGLS iteration regularization algorithm with the heuristic stopping rule was proposed and as examples was applied to reconstruct the impact load acting on a three-degree-of-freedom system and a shell structure. The results were compared with those by the classical Landweber iteration regularization algorithm and Tikhonov regularization method. Simulations and experiments demonstrate that the CGLS algorithm for impact load identification works better in the aspects of accuracy, convergence rate, cost time and anti-noise.
conjugate gradient least squares algorithm; Landweber algorithm; impact load identification; regularization method
国家自然基金项目 (51225501;51405370)
2015-05-28 修改稿收到日期:2015-12-11
卢立勤 男,博士生,高工,1978年生
张兴武 男,博士,讲师,1984年生
TB123;O32
A
10.13465/j.cnki.jvs.2016.22.026
猜你喜欢
怀化学院学报(2021年5期)2021-12-01
兰州理工大学学报(2021年3期)2021-07-05
兰州理工大学学报(2021年3期)2021-07-05
奇妙博物馆(2021年4期)2021-05-04
小演奏家(2018年9期)2018-12-06
黄河之声(2018年14期)2018-09-20
上海师范大学学报·自然科学版(2018年3期)2018-05-14
党的生活(黑龙江)(2017年10期)2017-11-09
共产党员(辽宁)(2015年24期)2015-10-18
浙江共产党员(2015年11期)2015-05-23