一种改进的空间全方位旋转角度测量方法
2016-12-22 06:34曹建安朱鑫吴昊张乐平
西安交通大学学报 2016年10期
曹建安,朱鑫,吴昊,张乐平
(西安交通大学电气工程学院,710049,西安)
一种改进的空间全方位旋转角度测量方法
曹建安,朱鑫,吴昊,张乐平
(西安交通大学电气工程学院,710049,西安)
针对采用双轴倾角传感器实现空间旋转角度测量的解析方法难以测量全方位旋转角度的问题,提出了一种改进的空间全方位旋转角度测量方法(IODSRA)。该方法在倾角传感器测量轴绕刚体旋转轴旋转的空间模型基础上,增加了一个沿原传感器法向量方向的单轴倾角传感器,以提高角度测量的灵敏度,改进了求解传感器空间位置参数的方法,获得空间位置参数;然后通过多个旋转方程的优化,得出最佳的空间全方位旋转角度。仿真和实验结果均表明,与其他实现空间旋转角度测量方法相比,IODSRA方法可实现在±180°范围内测量,其检测准确度达到0.2°的测量要求。
角度测量;全方位旋转角;倾角传感器;空间旋转模型;空间位置参数
为了保证飞行器,如无人机或F22战斗机等,在高速飞行时的机动性、灵活性及稳定性,其斜垂尾的偏转角度要求得到精确控制。因而,该类飞行器在进行地面测试时,需要对其斜垂尾的旋转角度进行精确测试,而斜垂尾的旋转角度测试问题相当于空间中刚体围绕和水平面有倾角的固定轴旋转角度的测量问题。
这类问题的解决,可以使用陀螺仪、电子罗盘等传感器实现,其中陀螺仪是对旋转角速率进行时间积分,即可获得旋转角度,适合对空间旋转角度的动态测量。然而,陀螺仪本身易受温度变化、不稳定力矩等因素干扰,存在零偏漂移、角随机游走等问题[1-3],长时间使用容易产生累积误差,不适合对旋转角度的静态连续测量。电子罗盘是以磁北为参考基准进行旋转角度测量的,但该基准容易受地域和环境磁场的影响,其测量误差较大,而且其安装误差也会导致产生罗差[4-6],以致其不能实现空间旋转角度的高准确度测量。
基于MEMS工艺的倾角传感器,其原理是对重力在其内部加速度计方向分量的测量,可以获得测量轴相对水平面的倾角。当传感器处于静态时,其角度输出比较稳定,可获得高准确度的水平角度,但当倾角传感器处于动态时,将引入旋转半径方向的角加速度,导致倾角测量不准确。因此,倾角传感器适用于对角度的静态连续测量,有体积小、成本低及稳定性高等优点[7-9]。
文献[10-11]采用双轴倾角传感器,建立了传感器测量轴绕刚体旋转轴旋转的空间旋转模型,提出了一种空间旋转角度(spatial rotation angle,SRA)测量方法,实现了[-100°,100°]范围内的旋转角度测量,但无法测量空间全方位旋转角度。文献[12]在空间旋转模型的基础上引入了虚拟的辅助轴z轴,推导了求解旋转角度的直接求解法,然而由于该方法中存在辅助轴难以求解、测量轴与水平面夹角较大时传感器灵敏度下降的问题,导致该方法只能实现旋转角度为[-70°,70°]范围内的测量要求,同样无法测量空间全方位旋转角度。
为了解决全方位旋转角度的测量问题,本文提出了一种改进的全方位空间旋转角度(improved omni-directional spatial rotation angle,IODSRA)测量方法。在双轴倾角传感器空间旋转模型的基础上,分析了求解空间位置参数方法中存在的问题,在辅助轴方向增加一个单轴倾角传感器,研究了测量轴在大角度时提高灵敏度的方法,利用多个旋转方程的优化求解出最佳的空间旋转角度。通过实验和计量部门的检验,证明了本文方法在求解空间全方位旋转角度这一工程问题上的有效性。
1 空间旋转模型简介[10]
1.1 双轴倾角传感器空间旋转模型
双轴倾角传感器的输出信号为其相互垂直测量轴x、y轴与水平面夹角的正弦值。传感器安装在测量平面上时,测量轴y轴与旋转轴在测量平面投影直线的夹角为α,旋转轴和水平面的夹角为β,旋转轴和测量平面的夹角为γ,如图1所示。
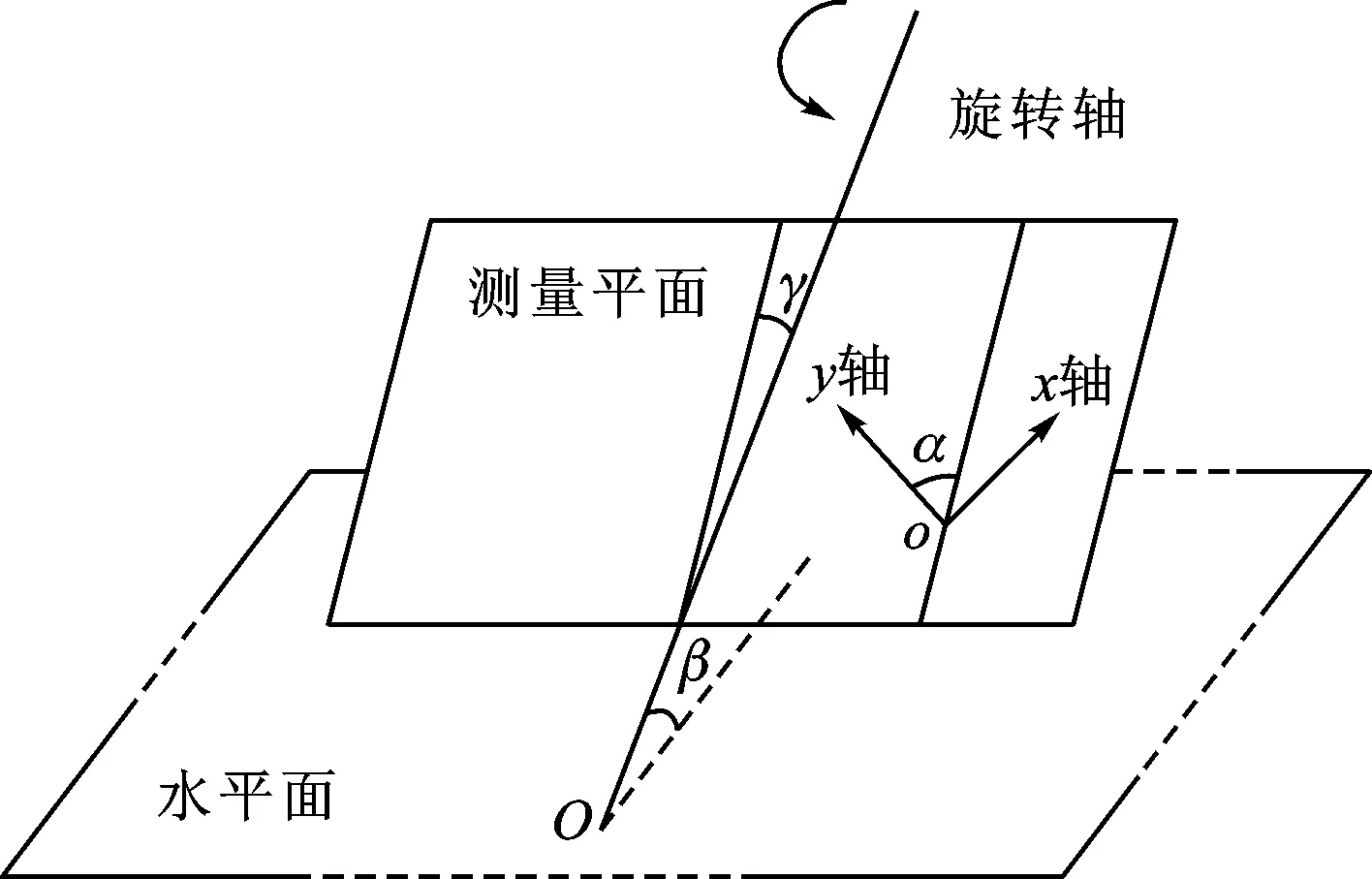
图1 双轴倾角传感器安装示意图
在图1安装示意图的基础上,建立传感器绕轴旋转的空间模型。以旋转轴和水平面的交点O为原点,旋转轴在水平面上的投影为Y轴,水平面上与过O点与Y轴垂直方向为X轴,过O点竖直方向为Z轴,建立右手笛卡尔坐标系O-XYZ。平移传感器测量轴,使两测量轴交点o与原点O重合,以两测量轴方向分别为x、y轴,建立平面坐标系xoy。令P代表水平面,L为旋转轴,旋转轴与水平面的夹角为β,如图2所示。
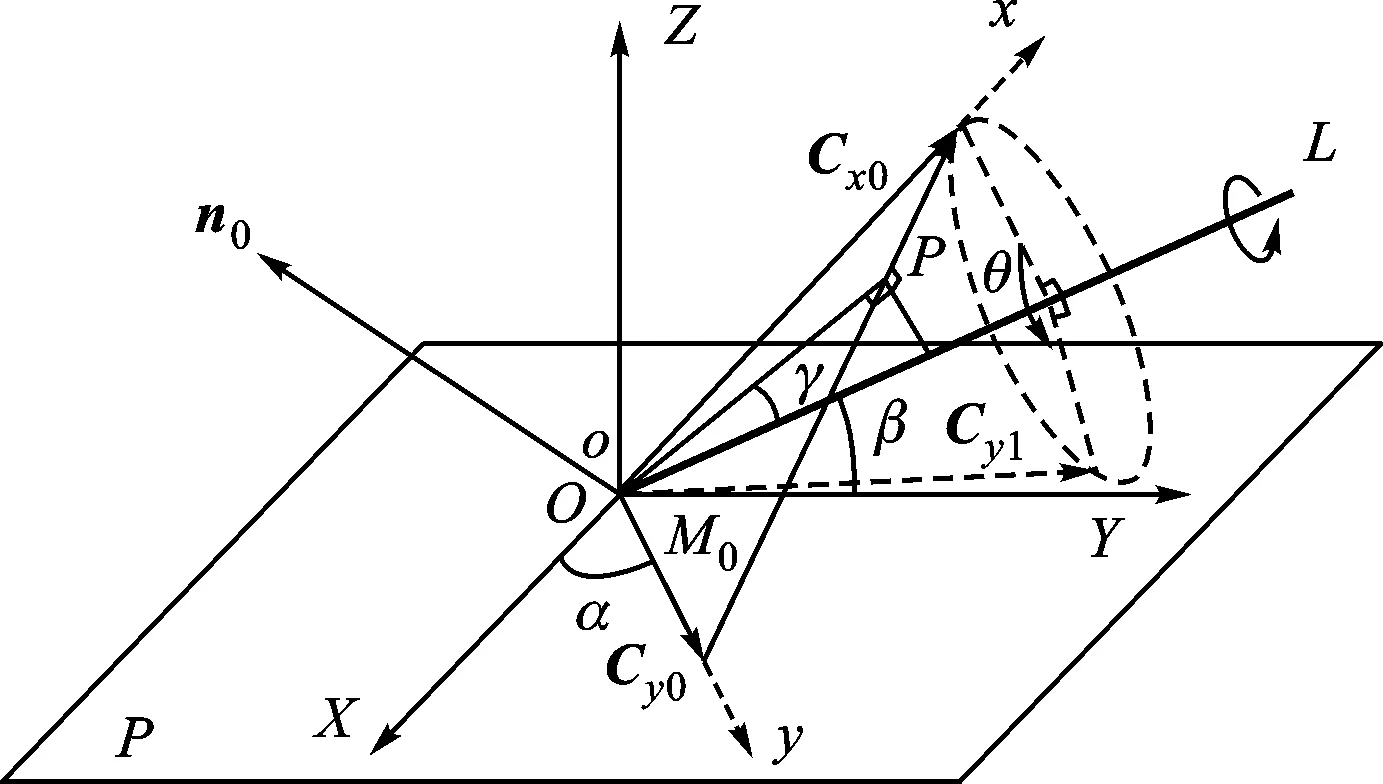
图2 双轴倾角传感器和旋转轴的空间模型
图2中双轴倾角传感器相互垂直的测量轴向量形成一个测量平面,其绕轴L旋转。设定测量平面绕L轴旋转至其法向量位于YOZ平面时的位置M0为初始零位,测量平面的法向量为n0,此时两测量轴的位置分别为Cx0、Cy0,测量平面M0与测量轴L的夹角为γ,测量轴Cx0和X轴夹角为α。测量轴向量分别绕L轴逆时针旋转θ角形成向量Cx1、Cy1。由空间位置参数α、β和γ可以唯一地确定双轴倾角传感器的旋转模型。
当测量轴Cx0、Cy0同时绕旋转轴L逆时针旋转角度θ后,可以得到如下方程
(1)
式中:Sx、Sy为向量Cx、Cy在水平面P上的倾角正弦值,即双轴倾角传感器两轴的输出信号。
由此建立了双轴传感器的输出信号Sx、Sy与旋转角θ的关系方程。
1.2 旋转方程的性质
传感器输出量(Sx,Sy)的轨迹为斜椭圆,其几何参数为:椭圆的几何中心(cx,cy)为(sinαcosγsinβ,cosαcosγsinβ),长轴倾角θ=-α,半长轴a=|cosβ|,半短轴b=|cosβsinγ|,离心率e=|cosγ|,传感器输出量的轨迹如图3所示。
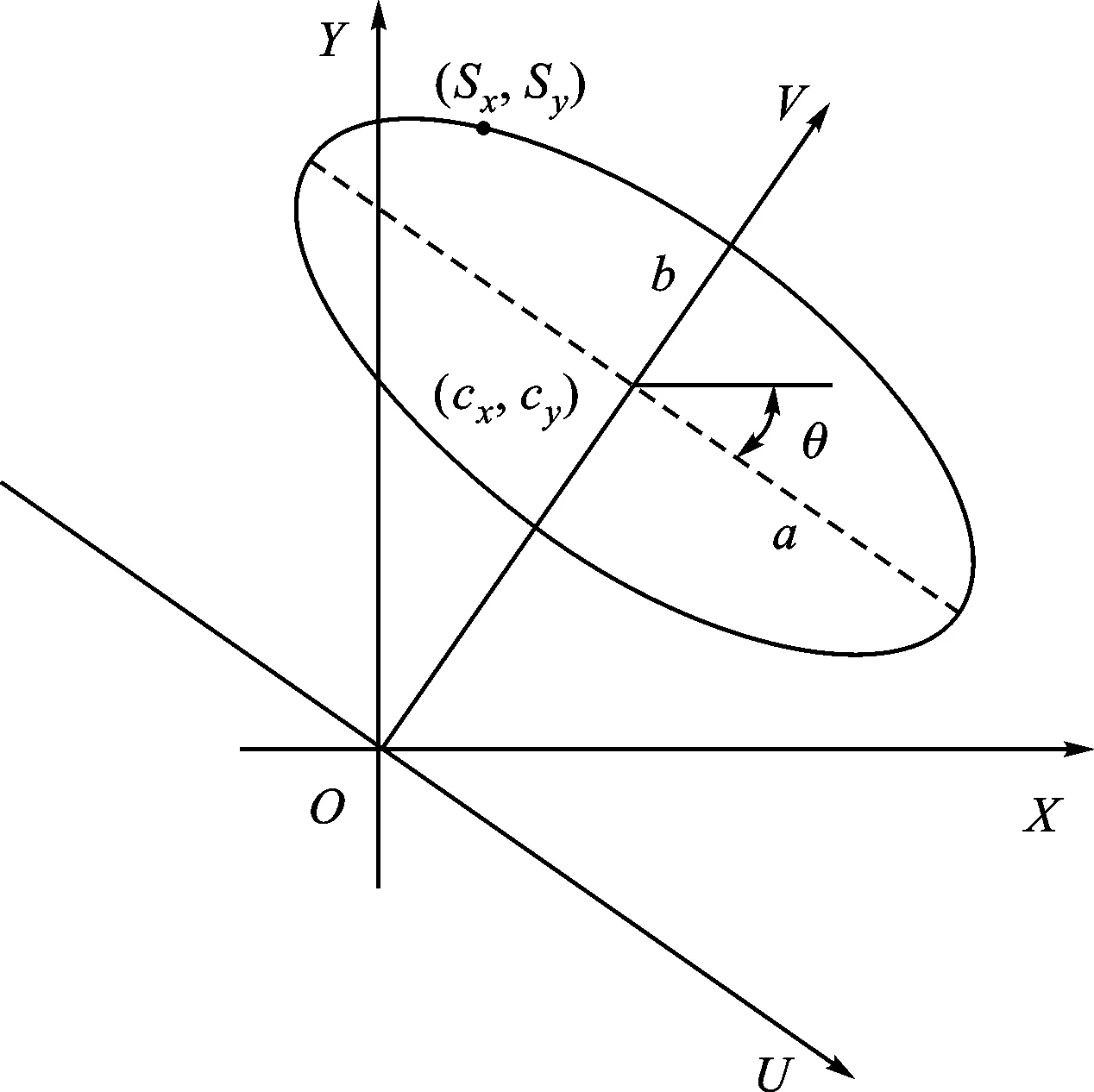
图3 传感器输出量(Sx,Sy)的轨迹
将XOY坐标系顺时针旋转角度α得到UOV坐标系,由平面直角坐标系的二维旋转矩阵
(2)
对输出量坐标进行旋转变换,得到旋转后的坐标
(3)
结合式(1)可得
(4)
2 空间全方位旋转角度求解方法
为了获得空间全方位旋转角θ,必须先求解空间位置参数α、β和γ,然后利用旋转方程求解空间全方位旋转角度θ。
2.1 直接求解法
传感器测量轴向量Cx和Cy叉积,即将传感器平面的法向量n作为辅助轴z轴,则z轴倾角的正弦值为
Sz=-sinγsinβ+cosγcosβcosθ
(5)
Sx、Sy、Sz满足如下方程
(6)
由倾角传感器输出(Sx,Sy)并结合式(6)可求得Sz值,获得相应的一组测量点(Sx,Sy,Sz)。
由式(3)~(5)变换后的旋转方程为
Sxcosα-Sysinα=-cosβsinθ
(7)
Sxsinα+Sycosα=cosγsinβ+sinγcosβcosθ
(8)
Sz=-sinγsinβ+cosγcosβcosθ
(9)
由式(8)、(9)可以得到如下方程
(Sxsinα+Sycosα)cosγ-Szsinγ=sinβ
(10)
至少需要3个测量点才能求解出空间位置参数,设3个测量点分别为(Sxi,Syi,Szi),i=1,2,3,令
(11)
利用式(10)对3点两两差分得到
(12)
从上式求解出
(13)
将α代回至式(12)和式(10),可以求解出γ和β的值。因此,直接求解法只需3个测量点,就可以求解出倾角传感器的空间位置参数α、β和γ,但由于测量点受传感器输出噪声的影响存在一定的误差,只用3个测量点求解出的空间位置参数误差很大,所以在工程应用时可以通过增加测量点的个数减小求解空间位置参数的误差。
直接求解法存在以下3个方面的问题。

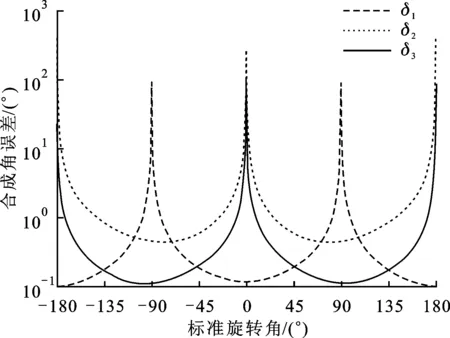
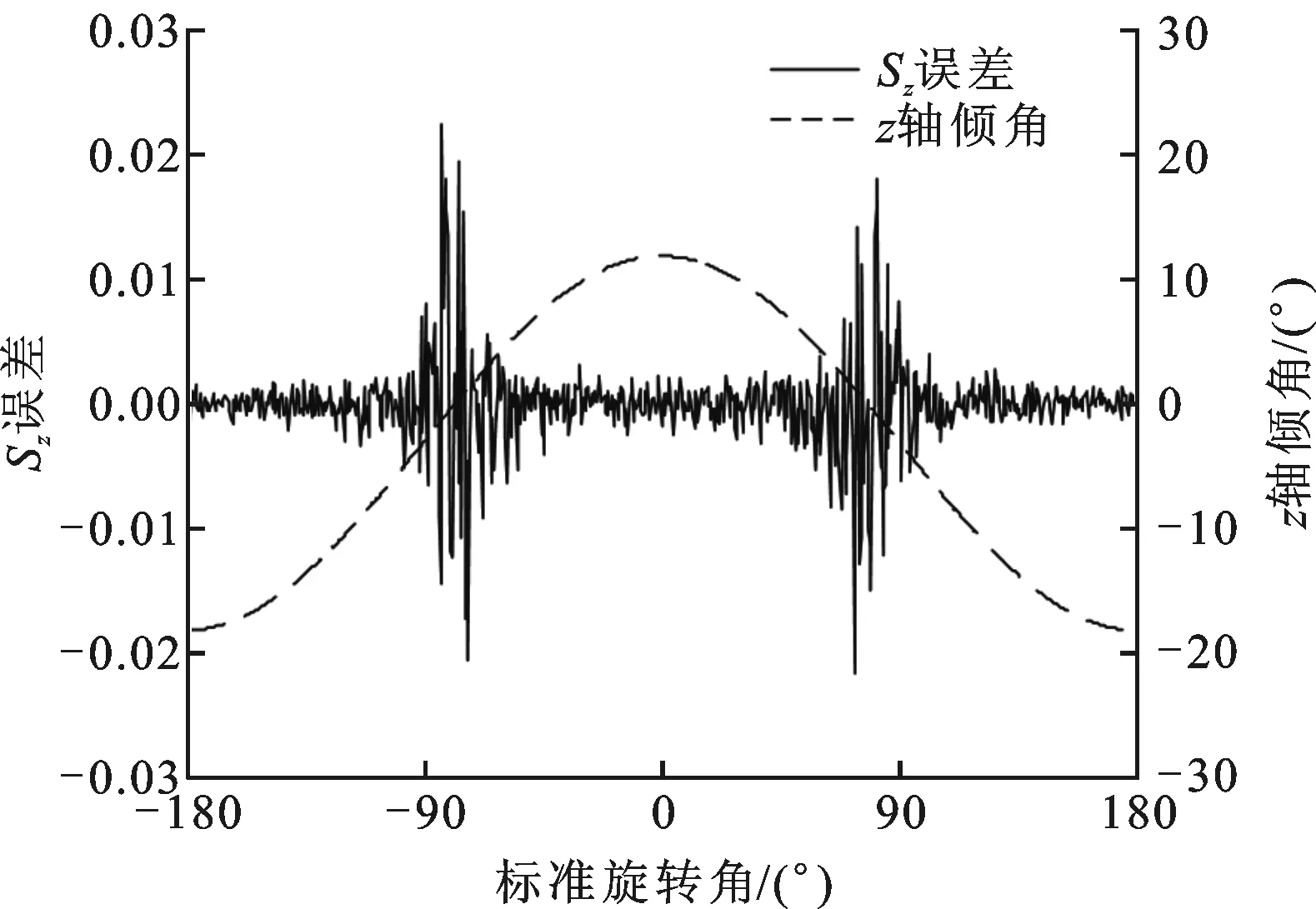
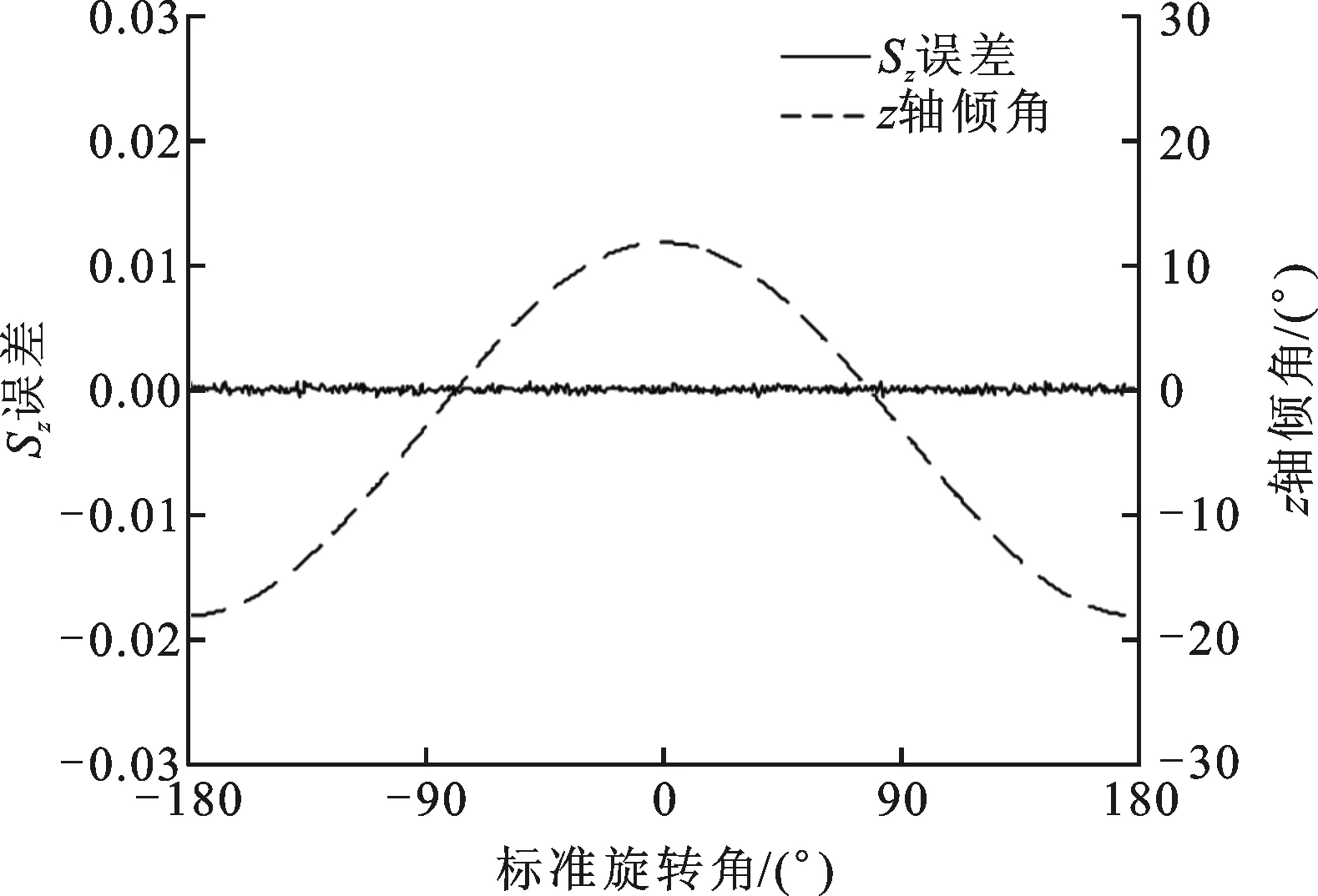
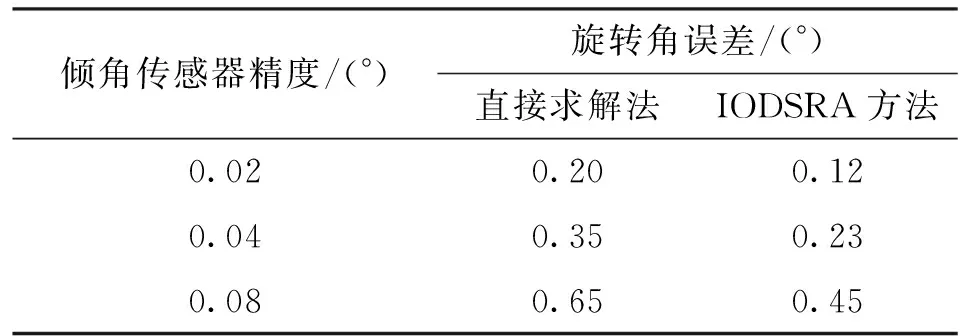
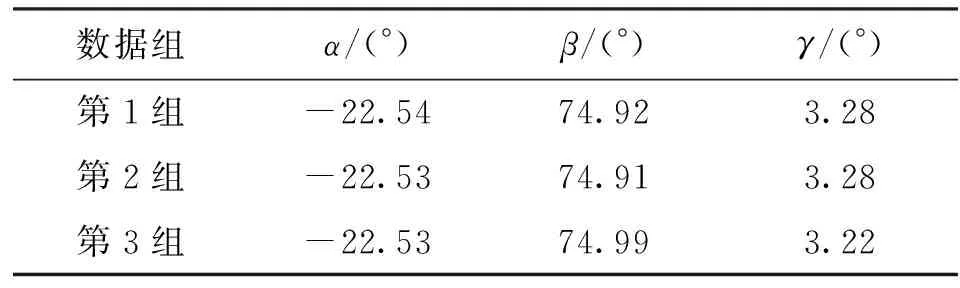
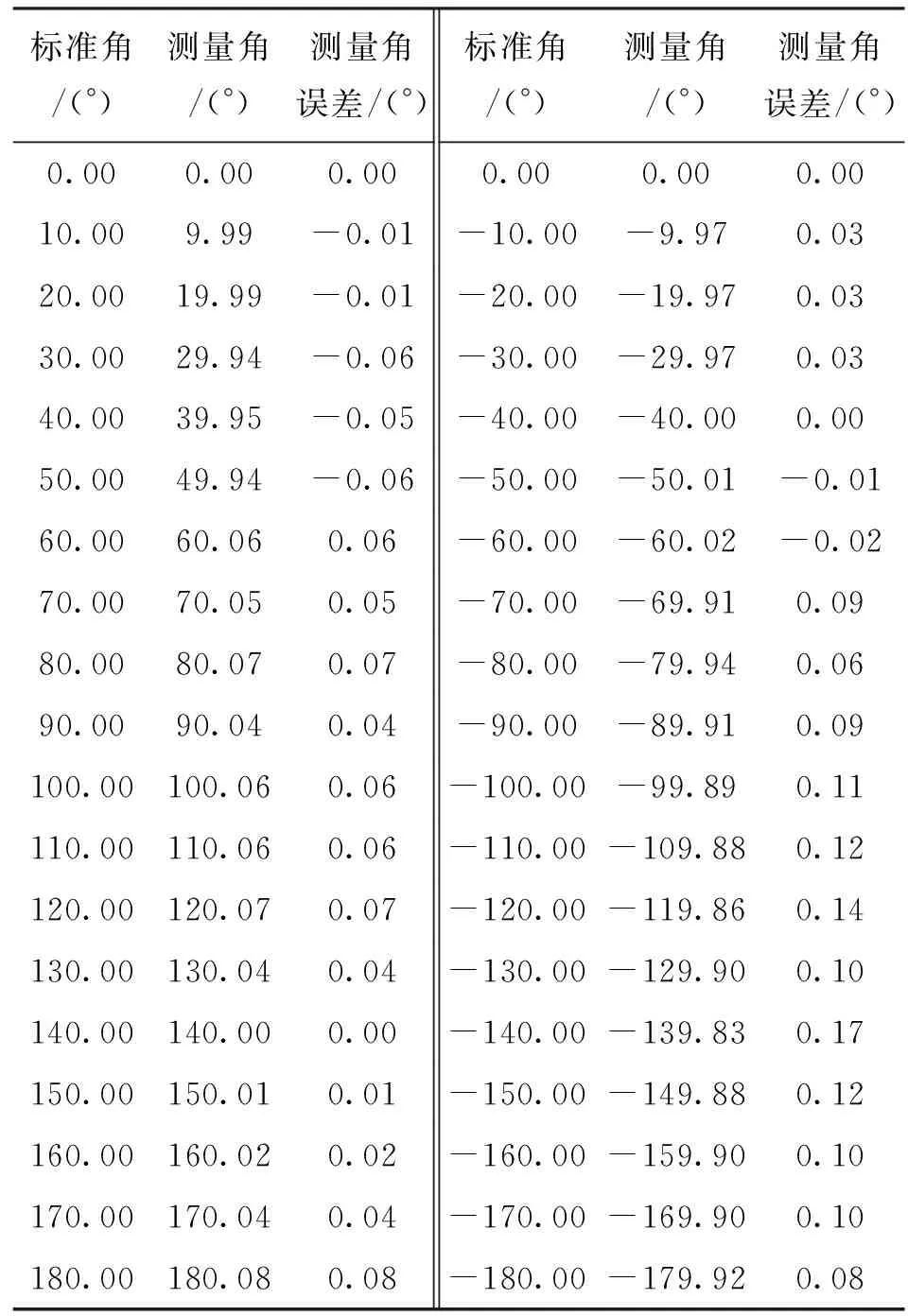
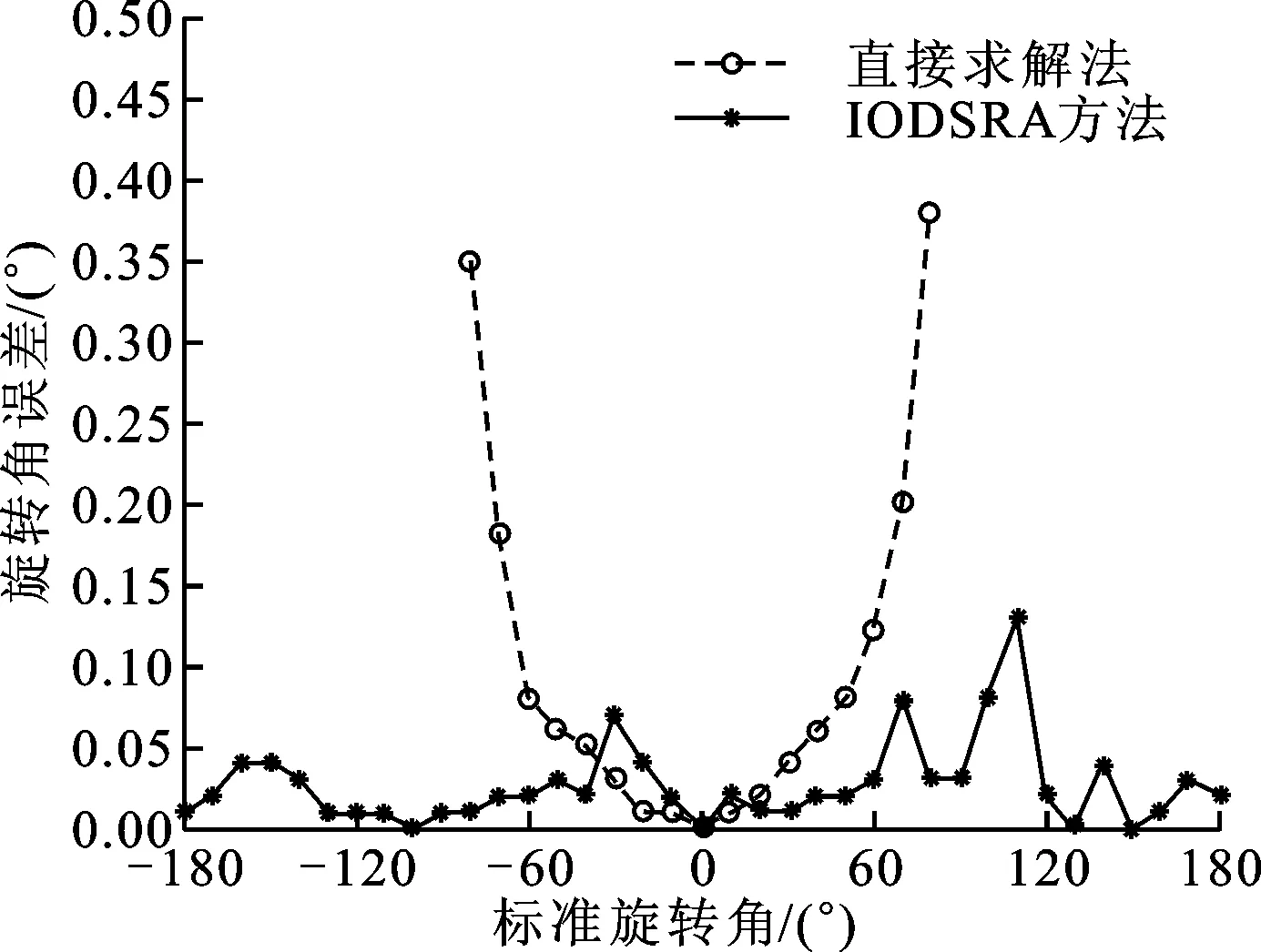
一种解决求解辅助轴符号判定问题的方法是:直接假定Sz为非负值,因为由式(5)可知,当cosθ (2)辅助轴倾角较小时求解辅助轴误差大。使用式(6)求解辅助轴的合成误差为 (14) 取δmin为δx和δy中较小的值,δmax为δx和δy中较大的值,则有 (15) 因此,在Sz值接近0时,由倾角传感器输出误差影响,使用式(6)求解Sz的误差会显著增大。 (3)传感器测量轴灵敏度随倾角增大而降低。倾角传感器原理决定了传感器在测量轴倾角增大时灵敏度逐渐降低,直到±90°时无法测量倾角,而传感器输出误差会随灵敏度降低而增大,继而会影响求解旋转角θ的准确度。 2.2 改进措施 针对直接求解法中存在的问题,采用以下方法进行改进。 (1)辅助轴方向增加一单轴倾角传感器。在原双轴倾角传感器的法向量方向增加一单轴倾角传感器,其输出为传感器测量轴z轴的正弦值,与直接求解法中虚拟辅助轴z轴的输出值意义相同,其表达式同式(5)。 采用改进方法可以直接获得单轴倾角传感器的输出值Sz,不需要依靠式(6)求解,从而解决了辅助轴输出值符号无法确定的问题;同时,由于z轴与水平面间的倾角变小时,z方向的单轴倾角传感器灵敏度高,测量误差很小,从而解决了在倾角较小时使用式(6)求解Sz值的误差过大的问题。 (2)测量轴在大角度时的灵敏度分析。测量轴与水平面夹角较小时传感器灵敏度较高,测量误差较小。由于x、y、z三轴传感器的输出值满足式(6),易知x、y和z方向传感器输出值的绝对值至多有一个值大于sin45°,即传感器在一个空间位置上三轴至多有一轴的倾角大于45°。具体分为以下2种情况:①当Sx、Sy、Sz均小于等于sin45°时,测试点(Sx,Sy,Sz)不修正;②当Sx、Sy、Sz其中一个值大于sin45°时,采用式(6)求解大于sin45°相应轴的值代替该轴原始输出值,其符号与原始值相同。测试点修正后,当传感器三个测量轴均与水平面夹角小于等于45°时,传感器输出误差δx、δy、δz均比较小;若其中一个测量轴与水平面夹角大于45°时,以z轴为例,此时δx、δy较小,δz较大,Sz值用式(6)求解,由式(15)可知,其求解的合成误差δ≤δmax,即求解出z的误差同样较小。 由以上分析可知,使用直接求解法时需要使用传感器±90°全范围的输出值,而改进方法只需要使用传感器±45°高灵敏度范围的输出值,以此降低了对传感器的要求,只需要保证传感器在±45°范围内的输出值达到一定的准确度。 2.3 利用旋转方程求解全方位旋转角度 在双轴倾角传感器的基础上,增加辅助测量轴,实现了三轴倾角传感器。其在旋转过程中,可测量并获得多组输出值(Sxi,Syi,Szi),其中i=1,2,…,n。使用改进的直接求解法,可求解出位置参数α、β、γ;然后在测量旋转角度时,获得传感器相应位置的输出值(Sx,Sy,Sz);将参数α、β、γ和输出值Sx、Sy、Sz带入旋转方程(7)、(8)或(9)即可求解出空间旋转角θ。 假定求解位置参数的误差为δα、δβ、δγ,传感器的测量误差为δx、δy、δz。下面分析使用旋转方程(7)~(9)求解空间旋转角θ的合成角误差δ1、δ2和δ3 (16) (17) (18) 取空间位置参数α=30°,β=60°,γ=10°,传感器输出量误差δx=δy=δz=0.000 5,空间位置参数误差δα=δβ=δγ=0.1°,标准旋转角θ的合成角误差情况如图4所示。 图4 旋转角合成角误差半对数坐标曲线 由式(16)和图4可知,由于存在1/cosθ和tanθ项,合成角误差在旋转角为0°时δ1达到极小值,在旋转角为±90°时δ1达到最大值,在旋转角为±180°时达到最小值。 由式(17)、(18)和图4可知,由于1/sinθ和cotθ项的存在,合成角误差δ2、δ3在0°和±180°时达到最大值,在±90°时达到最小值。由于δ2存在1/sinγ和cotγ项,而位置参数γ一般很小,导致误差δ2比δ3大的多。 综上所述,为了获得最佳的旋转角,应采取旋转方程(7)、(9)相结合的方法计算旋转角,当旋转角在±90°附近时取方程(9)求解的结果,在其他范围时可以通过方程(7)来求解旋转角。 仿真条件:取位置参数α=-23°,β=75°,γ=3.2°,均匀分布的18个样本点,加入服从均值μ=0、标准差σ=0.025%正态分布的噪声。 (a)直接求解法 (b)IODSRA方法图5 2种方法求解Sz值的误差对比 图5为以上条件下直接求解法及IODSRA方法中Sz值的误差情况,从图中可以看出,z轴倾角接近0°时,直接求解法中Sz值的误差急剧增大,而IODSRA方法中Sz值的误差为其加入的随机噪声。仿真验证了采用IODSRA方法可解决直接求解法中求解辅助轴时误差过大的问题。 在给定仿真条件下进行重复仿真,采用2种方法求解3个位置参数α、β、γ的平均绝对误差如表1所示。 表1 位置参数平均绝对误差对比 从表1可以得出,在给定的空间位置参数条件下采用IODSRA方法求解的α、β和γ的平均绝对误差分别降低了84%、83%和74%,证明了采用IODSRA方法能够显著减小求解空间位置参数的误差。 根据2.3节分析,直接求解法和IODSRA方法在仿真条件下求解旋转角的极限误差估算如表2所示。 表2 2种方法求解旋转角度的误差 从表2可以得出:使用的传感器精度越高,所获得的空间旋转角的准确度就越高;在相同精度传感器条件下,与直接求解法相比,使用IODSRA方法求解旋转角度减小了30%~40%的误差,所以空间旋转角度测量的准确度取决于倾角传感器和求解方法的精度。因此,采用IODSRA求解方法并使用高精度倾角传感器可以实现高准确度的全方位空间旋转角度测量。 根据上述分析,设计了测量空间旋转角度的三轴倾角传感器模块。 在国防工业6114二级计量站,采用型号为SJJF-1的光学分度头(GFJGJL2049150502519,准确度为1″),对倾角传感器三轴分别进行单轴计量,结果表明:X、Y、Z三轴在±45°范围内误差不超过±0.04°;在±(45°~65°)范围内误差不超过±0.2°;倾角大于±65°时,误差将超过±0.2°;限于倾角传感器原理,当在±90°时,传感器倾角是不可测量的。 同一空间安装位置下,采用IODSRA方法对传感器空间位置参数进行计算,结果如表3所示。不同组实验算出的参数α、β、γ差别很小,说明了IODSRA的方法求解空间位置参数的稳定性较好。 表3 空间位置参数 对该模块传感器进行[-180°,180°]范围的空间全方位旋转角度测量。模块的空间角度位置α、γ为任意安装,在转动轴倾角β分别为55°和75°的情况下,进行角度测量检验,测试结果及误差情况如表4、表5所示。 表4、表5的测试结果表明,使用IODSRA方法测量空间全方位旋转角θ的误差不超过0.2°。使用三轴倾角传感器模块在同一安装情况下进行旋转角度测试,图6为采用文献[12]的直接求解法和本文IODSRA方法计算出的旋转角误差绝对值对比情况。由图6可见:文献[12]方法只能测量±80°范围的旋转角度,且最大误差接近0.4°;本文方法可以测量±180°全范围旋转角度且误差不超过0.2°。相对于文献[12]方法,本文方法扩大了旋转角度检测范围,降低了测量误差,实现了空间全方位旋转角度的高准确度测量。 表4 β=55°时对标准旋转角的测试结果及误差 表5 β=75°时对标准旋转角的测试结果及误差 图6 不同方法检测旋转角误差对比 本文在双轴倾角传感器空间旋转模型的基础上,通过增加一个沿原传感器法向量方向的单轴倾角传感器,提高角度测量的灵敏度,获得了一种改进的空间全方位旋转角度测量方法。仿真和实验结果表明,该方法可实现[-180°,180°]全方位范围高准确度的空间旋转角度测量。 [1] GULMAMMADOV F. Analysis, modeling and compensation of bias drift in MEMS inertial sensors [C]∥Proceedings of 4th International Conference on Recent Advances in Space Technologies 2009. Piscataway, NJ, USA: IEEE, 2009: 591-596. [2] 成宇翔, 张卫平, 陈文元, 等. MEMS微陀螺仪研究进展 [J]. 微纳电子技术, 2011, 48(5): 277-285. CHENG Yuxiang, ZHANG Weiping, CHEN Wenyuan, et al. Research development of MEMS micro-gyroscopes [J]. Micronanoelectronic Technology, 2011, 48(5): 277-285. [3] 张海鹏, 房建成. MEMS陀螺仪短时漂移特性实验研究 [J]. 中国惯性技术学报, 2007, 15(1): 100-104. ZHANG Haipeng, FANG Jiancheng. Short-time drift characteristic of MEMS gyroscope [J]. Journal of Chinese Inertial Technology, 2007, 15(1): 100-104. [4] 晁敏, 蒋东方, 文彩虹. 磁罗盘误差分析与校准 [J]. 传感技术学报, 2010, 23(4): 525-532. CHAO Min, JIANG Dongfang, WEN Caihong. Error analysis and calibration of magnetic compass [J]. Chinese Journal of Sensors and Actuators, 2010, 23(4): 525-532. [5] 蒋贤志. 数字电子罗盘误差分析及校正技术研究 [J]. 现代雷达, 2005, 27(6): 39-44. JIANG Xianzhi. A study on the error analysis and calibration technique of digital compass [J]. Modern Radar, 2005, 27(6): 39-44. [6] 刘诗斌. 微型智能磁航向系统研究 [D]. 西安: 西北工业大学, 2001: 15-32. [7] LEAVITT J, SIDERRIS A, BOBROW J E. High bandwidth tilt measurement using low-cost sensors [J]. IEEE/ASME Transactions on Mechatronics, 2006, 11(3): 320-326. [8] BAI Yongqiang, HAN Junhui, QI Xianghua. Data processing algorithm of MEMS inclinometer based on improved Sage-Husa adaptive Kalman filter [C]∥Proceedings of the 31st Chinese Control Conference. Piscataway, NJ, USA: IEEE, 2012: 3702-3707. [9] QIAN Jiye, FANG Bin, YANG Weibin, et al. Accurate tilt sensing with linear model [J]. IEEE Sensors Journal, 2011, 11(10): 2301-2309. [10]曹建安, 张乐平, 吴昊, 等. 采用倾角传感器实现空间旋转角度测量的解析方法研究 [J]. 西安交通大学学报, 2013, 47(10): 109-114. CAO Jian’an, ZHANG Leping, WU Hao, et al. Analytical approach for measurement of spatial angle with inclination senor [J]. Journal of Xi’an Jiaotong University, 2013, 47(10): 109-114. [11]曹建安, 吴昊, 王亮, 等, 一种基于双轴倾角传感器的空间旋转角度测量方法: 201210279400.1 [P]. 2012-08-01. [12]吴昊. 基于倾角传感器的空间旋转角度测量方法及其工程应用 [D]. 西安: 西安交通大学, 2012. [本刊相关文献链接] 何鋆,白春江,王新波,等.一种采用交流激励的微弱非线性电流-电压关系测试方法.2016,50(6):97-103.[doi:10.7652/xjtuxb201606015] 徐田华,杨连报,胡红利,等.高速铁路信号系统异构数据融合和智能维护决策.2015,49(1):72-78.[doi:10.7652/xjtuxb201501012] 惠萌,刘盼芝,白璘,等.非自治铁磁谐振电路过电压脉冲时滞同步抑制方法研究.2014,48(6):55-59.[doi:10.7652/xjtuxb201406010] 韦兆碧,杨银堂,马志瀛,等.聚磁式光学电流互感器饱和特征的记忆效应补偿研究.2013,47(6):97-102.[doi:10.7652/xjtuxb201306017] 王小鑫,闫洁冰,胡红利,等.利用正交试验的电容传感器仿真及优化设计.2013,47(2):81-86.[doi:10.7652/xjtuxb 201302014] 姚学玲,杜志航,杨志豪,等.气体放电管直流击穿电压测量技术的研究.2012,46(10):1-7.[doi:10.7652/xjtuxb201210 001] 任双赞,钟力生,刘强,等.变压器油流动带电度的微静电测量方法及其影响因素.2010,44(8):96-100.[doi:10.7652/xjtuxb201008019] 齐静雅,王昭,黄军辉,等.机床导轨滚转角测量误差分析.2016,50(9):31-35.[doi:10.7652/xjtuxb201609005] 王伟,庄文浩,陶文坚.采用测量不确定度的复杂自由曲面表面质量测试与评价.2016,50(8):20-25.[doi:10.7652/xjtuxb201608004] 郝维娜,令锋超,刘志刚,等.轴承滚珠面型误差激光干涉测量系统的研究.2016,50(6):83-89.[doi:10.7652/xjtuxb 201606013] 余宝,王昭,黄军辉,等.机床滚转角高精度测量中的频偏现象研究.2016,50(3):101-105.[doi:10.7652/xjtuxb2016 03016] 赵进全,尹建华,夏建生,等.一种非对称输电线路参数的在线测量方法.2016,50(02):80-84.[doi:10.7652/xjtuxb2016 02014] (编辑 刘杨) An Improved Method for Measurement of Omni-Directional Spatial Rotation Angles CAO Jian’an,ZHU Xin,WU Hao,ZHANG Leping (School of Electrical Engineering, Xi’an Jiaotong University, Xi’an 710049, China) An improved method (IODSRA) to measure omni-direstional spatial rotation angles is proposed to focus on the problem, that the analytical approach for measurement of spatial angle with dual-axis inclination sensor can’t measure the omni-directional rotation angle. It is based on the space model that measurement axis of inclination sensor rotates around measurement axis of rigid body, and the method improves the sensitivity of measuring angles and obtains spatial position parameters by applying a single axis inclinometer in the direction of normal vector of existed sensor. The optimal rotational angle measurement is acquired by taking full advantage of several rotation equations. Experimental results show that the IODSRA method achieves the measurement of the omni-directional spatial rotation angle while other algorithms are unable, and that detection accuracy can be controlled under 0.2° and meets requirements. angle measurement; omni-directional rotation angle; inclinometer; space rotation model; spatial position parameter 2016-03-04。 曹建安(1971—),男,副教授。 国家自然科学基金资助项目(51177119);中央高校基本科研业务费专项资金资助项目(XJJ2013104)。 时间:2016-07-21 http:∥www.cnki.net/kcms/detail/61.1069.T.20160721.2216.016.html 10.7652/xjtuxb201610001 TM938.81 A 0253-987X(2016)10-0001-07
3 仿真分析

4 计量与实验
5 结束语
猜你喜欢
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
环球时报(2019-11-14)2019-11-14
制造技术与机床(2017年8期)2017-11-27
凿岩机械气动工具(2017年3期)2017-11-22
中学数学杂志(高中版)(2016年6期)2017-03-01
照明工程学报(2016年3期)2016-06-01
新高考·高一物理(2014年1期)2014-09-18
航天器工程(2014年5期)2014-03-11