
四旋翼反恐飞行器设计
2017-03-22 21:15顾臣务纪延俊宋海洋
教育教学论坛 2016年51期
顾臣务+纪延俊+宋海洋


摘要:以ARM系列的STM32处理器为主控制器对四个电机调速器进行控制,用电调电路调节无刷直流电机的转速,模拟四旋翼飞行器模型。通过实验、调试等手段确定了最符合模型样机的姿态控制算法,从而实现飞行器的平衡和姿态控制。在飞行器上搭载微光摄像头,从而实现对夜间或阴暗环境的检测。飞行器可通过遥控飞行,同时将拍摄的视频或图片发送到控制室,也可发送警报,实时追踪,大大增加了飞行器的利用率。
关键词:四旋翼飞行器;实时监测平台;电机控制;姿态解算
中图分类号:G642.0 文献标志码:A 文章编号:1674-9324(2016)51-0068-02
一、引言
小型四旋翼飞行器在远程侦察、监控、军事等领域具有巨大的优势,在无人机应用与实验领域,小型四旋翼无人机被认为是最好的平台。目前世界上的四旋翼飞行器基本都是微小型无人飞行器,可分为三类:遥控航模四旋翼飞行器、小型四旋翼飞行器以及微型四旋翼飞行器[1]。遥控航模四旋翼飞行器的典型代表是美国Draganglyer公司研制的Draganglyer3,它主要用于航拍[2]。其机载电子设备采用了碳纤维和高性能塑料作为机体材料,电子设备可控制四个电机的转速,另外电晶体螺旋仪进行姿势控制。
小型四旋翼飞行器的研究方向主要在三个方面,分别是基于惯导的自主飞行控制,基于视觉的自主飞行控制,和自主飞行器系统方案[3],其最典型代表分别是:瑞士洛桑联邦科技学院的OS4,宾夕法尼亚大学的HMX4和佐助亚理工大学的GTMARS[4]。OS4是EPFL自动化系统实验室开发的一种小型四旋翼飞行器研究重点是机构设计方法和自主飞行控制算法。HMX4在结构上与Draganglyer3相似,使用的控制算法是Backstepping。GTMARS是佐治亚理工大学面向火星探测任务二设计的CAD无人机系统[5]。
本文设计了一种小型四旋翼飞行器,并让飞行器搭载微光摄像头,从而能在夜间或阴暗环境下进行航拍监控,应用于车站、广场、小区等大多数人口相对密集的场所,自动巡逻,进行反恐监控,飞行器能将拍摄的视频或图片发送到控制室,也可以通过遥控控制飞行器的飞行,大大增加了飞行器的利用率。
二、飞行器系统设计
1.空间模型设计。由于四旋翼飞行器就实际来说是一个非线性高耦合欠控制的系统,在建立数学模型时往往会忽略某些外界不稳定因素以及旋翼之间的相互作用等难以精准描述的影响[6],因此要建立一个较为理想的动力学模型。
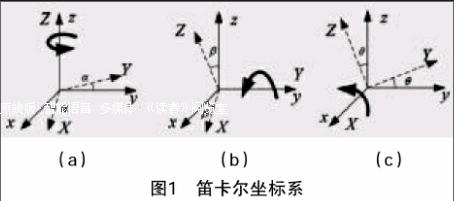
首先定义平面坐标系,地坐标系与机身坐标系,如图1,(a)中α表示偏航角,(b)中β表示俯仰角,(c)中θ表示翻滚角,其中地坐标系为以地面某个参考点为原点的静止笛卡尔坐标系,机身坐标系为以四旋翼飞行器的几何中心为原点的动坐标系。
2.控制系统设计。本文所设计的四旋翼飞行器控制系统由五部分构成,如下页图2所示。(1)ARM系列的STM32微处理器,它用来控制整个系统的运行,STM32系列处理器具有12位A/D转换器、D/A转换器、多通道的PWM定时计数器、异步串行口、UART、I2C、总线模块等接口电路[7]。(2)动力系统,包括4套电子调速器、无刷直流电机和螺旋桨。动力系统采用直流无刷直流电机。直流无刷电机具有力矩大、质量轻等特点,用非接触式的电子换向方法,消除了电刷磨损,较好地解决了传统直流有刷电机的缺点[8]。(3)传感器部分,使用MM6050加速度传感器作为角度传感器。(4)遥控部分,包括地面遥控器和无线通信模块。WiFi作为收发电路,地面遥控器发送加速、启动、减速、停止等命令。(5)电源系统,系统以11.8V的航模锂电池作为电源供应,为控制器、方向传感器、陀螺仪、电子调速器、无刷直流电机提供直流电源。
三、实物测试
采用十字四旋翼飞行方式,由摄像头及其外设电路产生WiFi区域网,通过终端连接WiFi即可实时监控地面状况,模块化有利于避免冲突和误判。图3为摄效果实测图。
四、结束语
本文所设计的小型四旋翼飞行器系统,以STM32为控制核心,采用MM6050实时采集飞行器飞行过程中姿态信息,通过控制无刷直流电机来提供飞行器的飞行动力,可以实现按规定路线巡逻,以及终端控制飞行和报警。另外,该小型四旋翼飞行器的难点在于夜间的监测,由于夜间拍摄光线不足,飞行高度需要降低,飞行难度上升,夜间航拍效果虽然不及白天,但是基本可见,能实现监控效果。
参考文献:
[1]宿敬亚,樊鹏辉,蔡开元.四旋翼飞行器的非线性姿态控制[J].北京航空航天大学学报,2011,37(9):1054-1058.
[2]甄红涛,齐晓慧,李杰,等.四旋翼无人机L1自适应块控反步姿态控制器设计[J].控制与决策,2014,(6):1076-1082.
[3]張镇,李浩.四旋翼飞行器模糊姿态控制[J].计算机仿真,2014,(08):73-77.
[4]吕国强,郑德峰.四旋翼飞行器控制系统设计[J].价值工程,2014,(20):213-213,214.
[5]赵述龙,安宏雷,刘建平,等.四旋翼飞行器模型的气动参数辨识[J].电子测量与仪器学报,2013,27(8):744-749.
[6]刘丽丽.四旋翼飞行仿真器的建模及控制方法的研究[D].中南大学,2009.
[7]孙鹏.微小孢无人良升机姿态控制及实验研究[D].长沙:国防科技人学,2008.
[8]张嘉钟,魏英杰,曹伟.飞行器动力学与控制[J].哈尔滨工业大学出版社,2011.
Design of Four Rotor Aircraft on Terror
GU Chen-wu,JI Yan-jun,SONG Hai-yang
(Institute of Aviation engineering,Bingzhou University,Bingzhou,Shandong 256600,China)
Abstract:The four motor speed regulators were controlled by ARM STM32 processor,the speed of brushless dc motor was adjusted by circuit,and the four rotor aircraft model was simulated. The attitude control algorithm of model prototype was determined by experiment,thus to realize the balance and attitude control of aircraft. A low light level camera was installed on the aircraft,so as to realize the detection of the night or dark environment. The aircraft flying through remote control can send video or photos to the control room at the same time,can send alarm and real-time tracking. This increases greatly the utilization of the aircraft.
Key words:four rotor aircraft;real-time monitoring platform;motor control;attitude algorithm
