
海面舰船开尔文尾迹红外特征与探测的模拟
2017-03-22 10:18林春生
红外技术 2017年8期
陈 翾,林春生,杨 立
海面舰船开尔文尾迹红外特征与探测的模拟
陈 翾1,2,林春生2,杨 立3
(1. 中国人民解放军 91336 部队,河北 秦皇岛 066326;2. 海军工程大学 兵器工程系,湖北 武汉 430033;3. 海军工程大学 动力工程学院,湖北 武汉 430033)
舰船在水面航行时,由于船体和水面的相互作用,在船后会形成一条清晰可见的V形的尾迹,即Kelvin尾迹。首先基于海浪谱模型,生成了粗糙海面的几何构型,并结合Kelvin尾迹模型,完成海面Kelvin尾迹的几何构型。然后,通过波面发射率计算、探测器视场模型建立及热像生成3个步骤,完成海面Kelvin尾迹的红外图像仿真。最后,根据尾迹与周围海水间的辐射温差,建立Kelvin尾迹的探测模型。研究结果表明:探测天顶角越大,Kelvin尾迹与周围海水间的发射率差异越明显,尾迹的红外图像特征越显著;同时,随着探测天顶角的增大,探测概率逐渐增大。
开尔文尾迹;红外特征;图像仿真;探测概率
0 引言
舰船在海面行驶时,会在船后形成一条明显可辨的尾流区,且能够持续很长时间,长度可达数千米[1]。舰船尾流区中包括Kelvin尾迹、湍流尾迹以及紧随船后的气泡尾迹。当风浪较小、船速较快时,Kelvin尾迹特征最为明显,在一定条件下,根据Kelvin尾迹和周围海水间的发射率差异,进行尾迹红外探测更为可行。利用舰船尾迹的波形特征进行舰船的监控和探测已得到国内外相关研究机构的高度重视[2],但目前研究重点大多集中在SAR成像技术[3-5],而利用红外成像技术进行Kelvin尾迹探测的研究还很少涉及。
本文首先利用海浪谱叠加的方法,建立粗糙海面几何模型,并结合Kelvin尾迹模型,完成海面Kelvin尾迹建模。然后,通过波面发射率计算、探测器视场模型建立及热像生成3个步骤,完成海面Kelvin尾迹红外图像仿真。最后,根据尾迹与周围海水间的辐射温差,建立Kelvin尾迹的探测模型,并以此计算出不同探测方向上的尾迹探测概率。
1 海面Kelvin尾迹建模
在线性海浪理论中,海浪被认为是由众多个不同振幅、频率、传播方向的余弦波叠加而成。将这些组成波的频域和方向分别划分成份与份,形成×个组成单元,并将这×个组成单元进行线性叠加,则海面(,)位置,波面高程(,)表示为[6]:
式中:()为频谱函数;(,)为方向分布函数;、分别表示第(,)个组成波的圆频率与方向角;D、D分别表示频率与方向角的划分间隔;表示[0, 2p]区间内服从均匀分布的随机初相位;k、w的表达式见文献[6]。
在计算波面高程时,需要知道海浪的频谱函数()和方向分布函数(,)。本文采用海浪研究中得到广泛应用的JONSWAP频谱函数与光易型方向分布函数计算海面波面高程,表达式分别为[6]:

式中:表示能量尺度参量;表示谱峰升高因子;m表示谱峰频率,与海面风距和风速相关;表示峰形参数;表示方向函数的集中度。
舰船在水面航行时,船后会形成一条V形的尾迹,这种由于舰船兴波作用引起的V形尾迹称为Kelvin尾迹。假设舰船以的速度沿轴正向行驶,结合“细船理论”[7],将舰船吃水轮廓简化为抛物线形状。舰船在行进过程中,船体与水体接触而产生的表面波沿着与轴夹角为的不同角度传播,Kelvin尾迹的波面高程可表示为这些平面波的叠加[8]:
式中:、、分别为舰船的半船宽、半船长和吃水深度。将海水波面高程(,)和Kelvin尾迹的波面高程(,)进行叠加,即为粗糙海面Kelvin尾迹的波面高程(,):
(,)=(,)+(,) (5)
粗糙海面Kelvin尾迹的波面高程图如图1所示,海面风速5m/s,船速18m/s,区域900m×900m,网格大小1m×1m。海面与Kelvin尾迹波面高程及纹理特征差异明显。海面浪高及纹理特征主要受风速和风向影响,风速越快,浪高越高,波浪沿风向方向传播。Kelvin尾迹的纹理特征成V形沿船驶过的方向向两侧扩张,波高主要受船速影响,船速越快,波高越高。
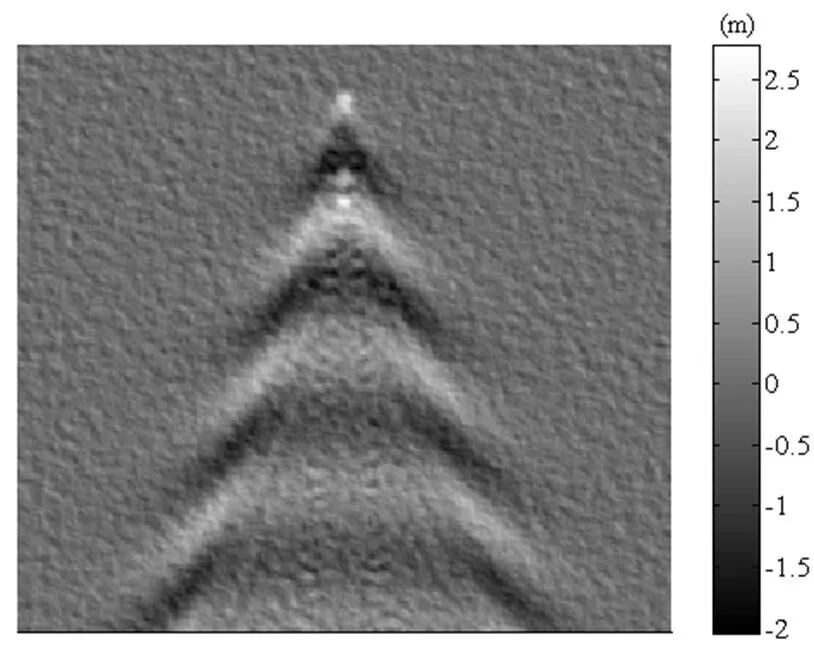
图1 海面Kelvin尾迹的波面高程
2 海面Kelvin尾迹红外热像模拟
场景红外热像模拟涵盖辐射能量的出射、传播、接收以及探测器与场景间的图像坐标与空间坐标转换等诸多方面,一般可由发射率计算、探测器视场模型建立及热像生成3个步骤来完成。
2.1 海面Kelvin尾迹波面发射率

根据Snell定律,入射角与折射角满足:


于是,1~2mm波段内波面的方向平均发射率()为:

式中:b为与波面同温的黑体光谱辐射出射度;b为与波面同温的黑体辐射出射度。
2.2 探测器视场模型
×元红外焦平面阵列探测器观测海面区域的探测示意图如图2所示。以船尾中部与海面接触位置为原点建立空间坐标,平面为海平面,轴正向为舰船行驶方向,平面中大四边形区域代表探测器的整个观测视场,大四边形区域中每个小网格区域代表单元探测器的观测视场(如图中阴影区域,它与红外图像中的某一像素点对应)。图中虚线为探测器轴线方向,对应图像中心,轴线与轴相交。
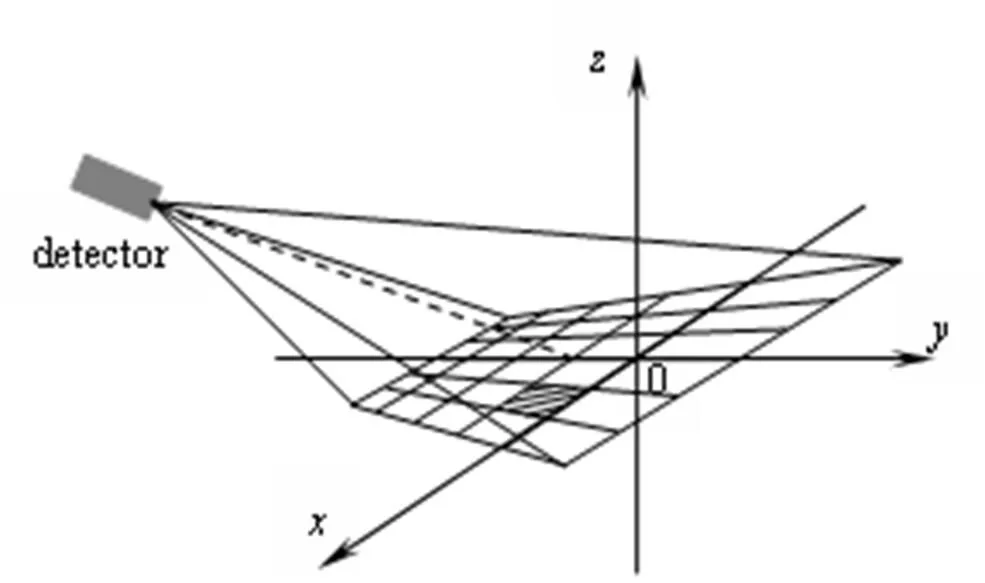
图2 探测示意图
在上节海面Kelvin尾迹的三维建模中,已将海面等分成众多个小波面(1m×1m),所以每个单元探测器观测到的海面区域实际上就是这些小波面的平铺。由于探测器倾斜观测海面,所以单元探测器观测到的海面是一个远宽近窄的梯形区域,如图3所示。单元探测器接收到的信号即为梯形区域中海面波面辐射能量信号的平均。
2.3 海面Kelvin尾迹的热像生成
在红外图像中,像素点灰度值的差异对应的是景物间表观辐射温度的差异。在进行海面Kelvin尾迹模拟时,先计算出每个海面波面的辐射温度,再将单元探测器的视场中所包含的海面波面的辐射温度进行平均,即为该图像像素点处的辐射温度,并逐点计算所有像素点处的辐射温度,最后根据像素点辐射温度和灰度值的转化关系得出海面Kelvin尾迹的红外热图像。由红外测温原理可知,任一海面波面辐射温度r为[10]:

式中:ta为探测器到该海面波面处的大气透射率;e(c)为l1~l2 mm波段内波面方向的平均发射率;c为入射角,即探测方向与该波面法线方向的夹角;T0为被测物体表面真实温度;Tu为环境温度;Ta为大气温度;n的取值与波段相关,在2~5mm波段,n=8.68;在8~13mm波段,n=4.09。
将任一单元探测器视场中包含的全部海面波面的辐射温度进行平均,即为对应图像像素点(,)处的辐射温度r(,)。则图像中任意像素点(,)的灰度值(,)为:

式中:rmin、rmax分别为像素点的最小和最大辐射温度,int()为正向取整函数。
不同探测方向的海面Kelvin尾迹的红外模拟图像如图4所示,0=300K,a=303K。从图中可以看出,探测方向对Kelvin尾迹的红外成像特征影响显著,探测方向天顶角越大,尾流区与周围海水的粗糙度差异越明显,它们之间表面发射率差异越大,Kelvin尾迹图像特征也越明显,随着探测方向天顶角的减小,尾流区与周围海水的发射率差异逐渐减弱,Kelvin尾迹特征逐渐被周围海水淹没。从图中辐射温度的差异也可以看出,探测方向天顶角越大,场景中的辐射温度差异越大,尾迹的图像特征越明显;反之,探测方向天顶角越小,场景中的辐射温度差异越小,尾迹几乎无法分辨。
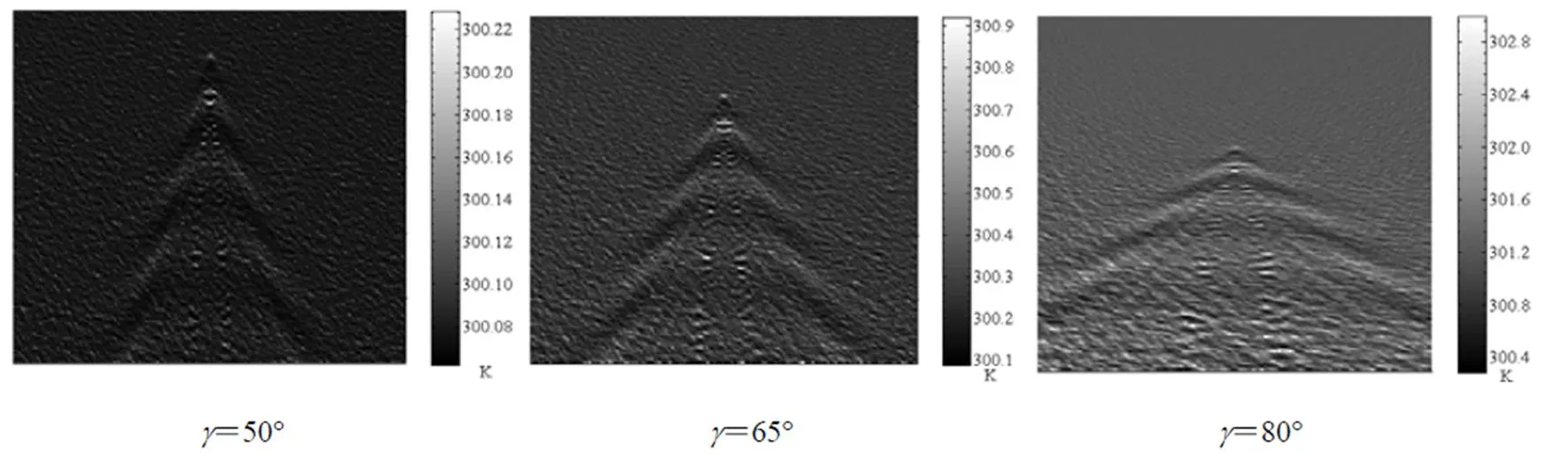
图4 海面Kelvin尾迹的红外模拟图像
3 海面Kelvin尾迹红外探测概率
红外成像探测器对海观测时,能够从观测视场中发现Kelvin尾迹的基本条件是,探测器感受到的尾迹与周围海水间的辐射温差D()不小于探测系统的最小可分辨温差MRTD(,b),即:

式中:为探测方向天顶角;MRTD(,b)表示经实际条件修正后的最小可分辨温差,与噪声等效温差NETD密切相关;表示尾迹的空间频率;b表示周围海水温度。公式取等号时为极限探测条件。
由上节内容可知,在对海面Kelvin尾迹进行观测时,焦平面探测器的任一单元探测器感受到辐射温度为r(,),那么全部的×个单元探测器感受到的辐射温度可组成一个×元矩阵r。假定观测角度及外界条件不变的情况下,视场中只有海面,而没有Kelvin尾迹,同样可得到一个×元矩阵r1,则尾迹与海水间的辐射温差D()为:

式中:abs()为一函数,功能为矩阵中各元素取绝对值;mean()为一函数,功能为矩阵元素的平均值。
而MRTD(,b)可表示为[11]:
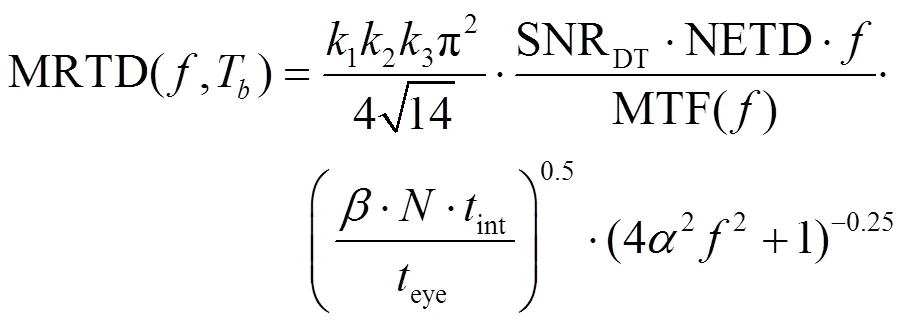
式中:1、2、3分别为目标形状修正系数、背景温度修正系数和信噪比修正系数;SNRDT表示阀值信噪比;MTF()表示系统总传递函数;表示探测单元数;int表示探测器光积分时间;eye表示人眼光积分时间;为瞬时视场角。
在极限探测条件下将式(13)和(14)代入式(12)可得阀值信噪比SNRDT:
探测目标所需阀值信噪比SNRDT与红外成像探测器的探测概率d密切相关,满足如下概率积分[12]:

式中:SNRDT,50%表示探测概率为50%时的阀值信噪比,通常取SNRDT,50%=2.8。不同噪声等效温差NETD下的海面Kelvin尾迹的探测概率随探测天顶角的变化关系如图5所示。从图中可以看出,探测天顶角小于35°时,红外探测器对Kelvin尾迹的探测概率几乎为零,随着探测天顶角的增大,对尾迹的探测概率显著提高,在同一探测角度下,系统的噪声等效温差NETD越小,探测器越灵敏,对尾迹的探测概率越高。

图5 探测概率
4 结论
通过以上分析,可以得出以下结论:
1)舰船在海面航行时,会在船后形成明显V形的Kelvin尾迹,其纹理特征与周围海水显著不同,为尾迹探测提供了现实基础。
2)探测天顶角越大,Kelvin尾迹与周围海水间的发射率差异越明显,辐射温度差异越大,尾迹的红外图像特征越显著。
3)探测天顶角较小时,Kelvin尾迹与周围海水间的辐射温差很小,尾迹无法被识别,随着探测天顶角的增大,Kelvin尾迹与周围海水间的辐射温差逐渐增大,对尾迹的探测概率逐渐增大。
[1] Reed A M, Milgram J H. Ship wake and their radar images[J]., 2002, 34: 469-502.
[2] 张士成,杨桢,杨立. 海洋背景下8~12μm Kelvin尾迹红外探测[J]. 红外与激光工程, 2011, 40(10): 1851-1855.
ZHANG Shicheng, YANG Zhen, YANG Li. Infrared detection of 8-12 μm Kelvin wake under ocean background[J]., 2011, 40(10): 1851-1855.
[3] Zilman G, Miloh T. Kelvin and V-like ship wakes affected by surfactants[J]., 2001, 45(2): 150-163.
[4] Shugan I V, Lee K, Sun A J. Kelvin wake in the presence of surface waves[J].2006, 357: 232-235.
[5] Fujimura A, Soloviev A, Kudryavtsev V. Numerical simulation of the wind-stress effect on SAR imagery of far wakes of ships[J]., 2010, 7(4): 646-649.
[6] 余聿修. 随机波浪及其工程应用[M]. 大连: 大连理工大学出版社, 2011.
YU Yuxiu.[M]. Dalian: Dalian University of Technology Press, 2001.
[7] WANG H. Spectral comparisons of ocean waves and Kelvin ship waves[C]//, 1998, 2: 253-261.
[8] Oumansour K, Wang Y, Saillard J. Multi frequency sarobservation of a ship wake[J].1996, 143(4): 275-280.
[9] 刘燕, 沈国土, 蔡继光. 改进的海面辐射模型[J]. 红外与激光工程, 2009, 38(1): 19-22.
LIU Yan, SHEN Guotu, CAI Jiguang. Improved sea surface radiation Models[J]., 2009, 38(1): 19-22.
[10] 杨立. 红外热像仪测温计算与误差分析[J]. 红外技术, 1999, 21(4): 20-24.
YANG Li. Calculation and error analysis of temperature measurement using thermal imager[J]., 1999, 21(4):20-24.
[11] 吴小平, 周起勃, 邬敏鸣. 红外焦平面凝视热成像系统评估方法研究[J]. 红外与毫米波学报, 1993, 12(4): 249-253.
WU Xiaoping, ZHOU Qibo, WU Minming. Studies on evaluating methods for staring thermal imaging systems using IR focal plane[J]., 1993, 12(4): 249-253.
[12] 金伟其, 张敬贤, 高稚允. 热成像系统对扩展源目标的视距估算[J]. 北京理工大学学报, 1996, 16(1): 25-30.
JIN Weiqi, ZHANG Jingxian, GAO Zhiyun. Visual range prediction for the extended source target in thermal imaging systems[J]., 1996, 16(1): 25-30.
Simulation of Infrared Characterizationsand Detection of Kelvin Wake
CHEN Xuan1,2,LIN Chunsheng2,YANG Li3
(1.91336,066326,; 2.,,430033,; 3.,,430033,)
A Kelvin wake is defined as the clear V-wake trailing a ship that forms from the interaction between the hull and the water surface as the ship sails. In this study, the wave spectrum model was used to create the geometric structure of the sea surface; combining sea surface model with the Kelvin wake model yielded the geometric structure of a Kelvin wake pattern on the sea surface. Next, the infrared image simulations of sea surface Kelvin wake patterns were completed by performing the following steps: ① calculation of the wave plane, ②establishment of a detector field model, and ③generation of a thermal image. Finally, the detection model of a Kelvin wake was established according to the radiant temperature difference between a Kelvin wake and the ambient sea water. The results showed that increased detected zenith angle yielded an increased emissivity difference between the Kelvin wake and ambient sea water. Consequently, the infrared image characterizations of Kelvin wake were more distinguishable, and the detection probability was found to gradually increase with increasing detection zenith angle.
Kelvin wake,infrared characterizations,image simulation,detection probability
TN215
A
1001-8891(2017)08-0717-05
2017-03-06;
2017-08-08.
陈翾(1981-),湖北武汉人,博士后,主要进行军事目标红外特征模拟及隐身技术研究。E-mail:chenxuan1019@126.com。
国防预研项目;海军工程大学自然科学基金项目(HGDJJ05009)。
猜你喜欢
广西物理(2022年2期)2023-01-04
电子设计工程(2022年12期)2022-06-29
阅读(科学探秘)(2020年6期)2020-08-28
水道港口(2020年6期)2020-02-22
扬子江(2019年5期)2019-09-23
中学教学参考·理科版(2018年7期)2018-10-20
中文信息(2018年2期)2018-05-30
中学数学杂志(初中版)(2017年6期)2018-01-05
北京航空航天大学学报(2017年2期)2017-11-24
雷达学报(2012年4期)2012-10-03
