
基于混合噪声估计的高光谱图像异常检测方法
2017-03-22 10:18向英杰张俭峰
红外技术 2017年8期
向英杰,张俭峰,杨 桄,王 琪
基于混合噪声估计的高光谱图像异常检测方法
向英杰,张俭峰,杨 桄,王 琪
(空军航空大学,吉林 长春 130000)
随着光谱分辨率越来越高,高光谱图像更容易受到噪声的干扰,直接用传统的检测算子会产生较高的虚警。针对RX算法存在较大噪声干扰的问题,提出了一种基于混合噪声评估的RX异常检测方法。首先对高光谱图像进行分块,利用滤波的思想选取均匀图像块;考虑图像光谱-空间信息,运用多元线性回归分析对均匀图像块进行混合噪声评估;然后将高光谱图像和混合噪声进行作差,消除噪声的干扰;最后运用RX算子进行异常检测。实验结果表明,该方法达到了消除噪声的效果,与RX和MNF-RX算法相比具有更好的目标检测性能。
高光谱图像;异常检测;混合噪声评估;多元线性回归;RX
0 引言
高光谱图像包含许多连续的波段,形成一个“图谱合一”的数据立方体。这种数据立方体,能够独特显示地物目标信息,从而很好地应用于目标检测。但是在大多数情况下,目标的先验光谱信息难以获得,因此对高光谱进行异常检测显得尤为重要。
在异常检测算法中,一种标志性方法就是由Reed和Yu在1990年提出来的RX方法[1],该方法来源于广义似然比检测,其基本思想是在假设目标和背景符合均值不同、协方差相同的多元正态分布情况下,用马氏距离定义检测算子来检测异常目标。随后Chang等[2-3]对RX方法进行了改进,提出了一系列改进算子,有效提高了目标的检测效率。但是,随着高光谱遥感技术的发展,高光谱图像的光谱分辨率不断提高,高光谱图像波段越来越窄,图像更容易受到噪声干扰。并且RX算法及其改进算法,对噪声非常敏感,如果不能很好地进行噪声估计并去除噪声,将会影响检测性能。因此,如果能很好地对高光谱图像的噪声进行估计,就能大大提高RX算法的检测效果。
通常认为,高光谱图像的噪声为包含加性噪声和乘性噪声的混合噪声,且假设服从高斯分布。基于此,文献[4]提出了一个参数化混合噪声模型。基于该模型和混合噪声的假设,已有多种混合噪声估计算法提出[5-9]。这几种算法由于并没有同时考虑图像的空间信息和光谱信息,因此在对高光谱图像噪声估计时存在较大的误差,甚至在图像边缘纹理较多时,可能得到错误的结果。为了解决这一问题,将高光谱图像的空间信息和光谱信息结合起来进行混合噪声估计,就显得很有必要。
基于RX算法和混合噪声的假设,文中提出了一种基于混合噪声估计的RX改进算法。首先对高光谱图像进行滤波,从众多图像块中选取均匀图像块。然后对图像各个波段的混合噪声进行估计,得到噪声残差。然后用待测光谱向量减去噪声残差,得到去噪声后的图像数据。最后,将作差后的图像数据进行RX异常检测。
1 RX算法
RX算法是在目标和背景未知的情况下,假设图像数据服从均值不同但是协方差矩阵相同的正态分布。进而建立如下的二元假设:
0:=1:=+(1)
式中:0代表目标不存在;1代表目标存在;为待检测的光谱向量;代表噪声向量;代表目标光谱向量;为系数,当=0时,满足假设0,当>0时,满足假设1。
在二元假设的基础上,定义了如下的马氏距离检测算子:

2 混合噪声模型
对于每一个高光谱图像像元,都是由两部分组成:有用的目标信号和噪声。因此待测图像像元可表示为如下模型:
=+() (3)
式中:=[1,2,…,]T为目标光谱向量,且是一个×1阶矩阵,代表波段数量;()=[1(1),2(2),…,()]表示混合噪声向量,包含乘性噪声SD()和加性噪声SI(),且由文献[4]可知,混合噪声服从均值为0的高斯分布。
对于任意波段图像,混合噪声可表示为:
2(s)=SD(s)(s)+SI(s) (4)
式中:2(s)为混合噪声方差;(s)为目标光谱均值;SD(s)和SI(s)分别为乘性噪声和加性噪声的方差。而对于任意波段图像中的任一图像块,目标光谱均值近似等于观测图像灰度的均值,即(s)=()。因此,在图像块中,混合噪声的方差2()可表示为:
2()=SD()()+SI() (5)
3 本文算法设计
结合高光谱图像混合噪声估计和RX算法,提出了一种新的基于混合噪声估计的RX算法,在进行混合噪声估计时采用划分均匀图像块和多元回归分析的方法[10],然后进行异常检测。主要分为以下4个步骤:①进行图像块的划分,然后进行均匀图像块的选取;②运用多元线性回归分析的方法对图像的混合噪声进行评估;③将目标像元的光谱向量减去噪声向量,得到去噪后的光谱向量;④将去噪后的光谱向量作为待检测光谱向量,用RX方法进行异常检测,得到检测结果。本方法的流程图如图1。
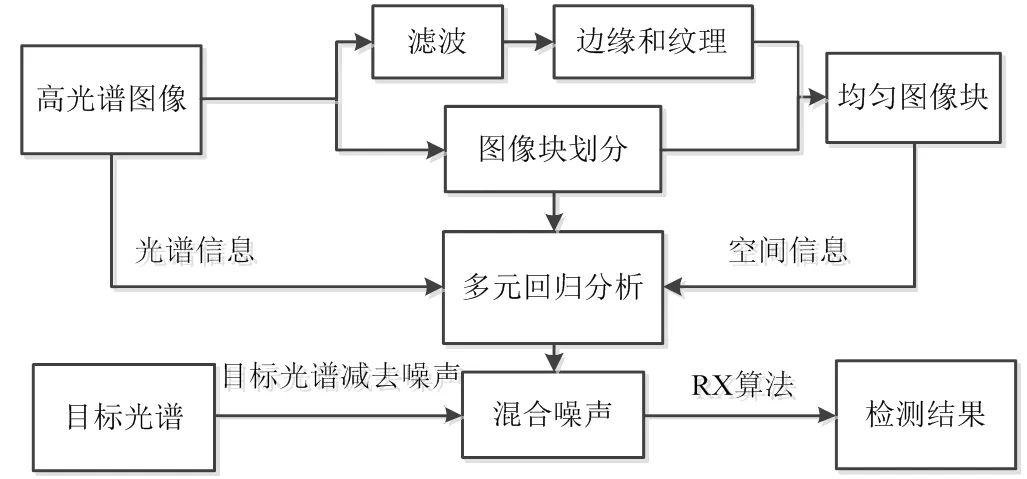
图1 本文算法流程图
3.1 均匀图像块选取
高光谱图像中往往存在着许多小的均匀图像块,即不包含地物边缘和纹理信息的图像块。在这些图像块中,可以认为图像灰度值的变化主要是由噪声引起的。因此,如果能找到均匀图像块,就能从均匀图像块中估计高光谱图像的混合噪声。光谱角距离[11]能很好地描述像元间的光谱相似性,可用于均匀图像块的选取,文献[12]就用光谱角距离的方法,对高光谱图像同质区域进行分割。但是此方法主要考虑高光谱图像的光谱信息,而忽略了图像的空间信息,使得噪声估计的误差较大。
基于此,运用图像块划分和图像滤波[13]的思想来对均匀图像块进行选取,其基本思路为:首先将一幅图像划分为若干连续不重叠的规则图像块,然后运用图像滤波的原理,采用八方向滤波窗口对图像块进行滤波;在滤波时,通过设定适当的阈值,来进行边缘和纹理的提取;最后选取不包含或者包含极少纹理和边缘信息的图像块,此图像块即为均匀图像块。采用Otsu阈值[14]选取方法来确定阈值,从而提取边缘和纹理,最终选取均匀图像块。根据图像滤波原理,随着滤波窗口的增大,边缘保持能力呈变小的趋势。因此,为了避免滤波时平滑掉某些小的目标,防止所选均匀图像块中包含某些小目标,窗口的选择不宜过大。再考虑到运算时间因素,本文滤波所用的八方向滤波窗口大小为3×3,如图2所示。依次使用图2中的窗口对各个图像块进行滤波,滤波后的像素值为各个滤波窗口滤波后的绝对值之和。
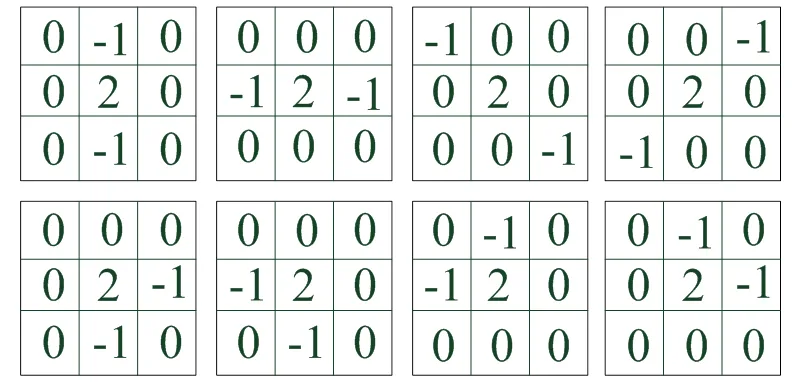
图2 八方向滤波窗口
均匀图像块是图像中纹理、边缘较少,图像较为均匀的区域,因此可认为均匀图像块中不包含待检测的异常目标。所以,在选取均匀图像块过程中,可以不考虑滤波处理会平滑掉某些异常目标的情况。
3.2 混合噪声估计
多元线性回归(MLR)[7]是一种普遍使用的估计方法,它利用了图像的高空间/光谱维相关性。为了更好地估计噪声,本文还利用图像的空间信息,将像元的4-邻域点纳入回归分析计算中。设某一波段图像,其均匀图像块¢,大小为×,任意待测光谱像元像素值为x。则多元线性回归模型为:
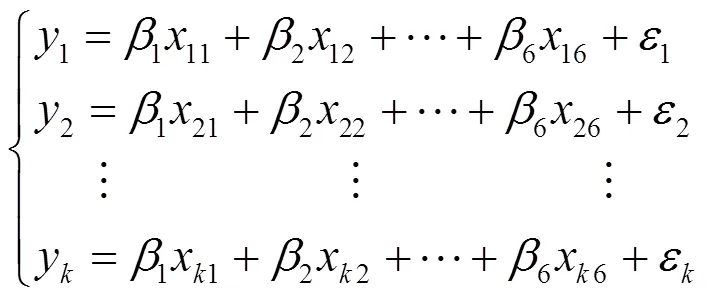
式中:y表示均匀图像块中个预测像元像素值;x1和x2分别表示x的前后相邻波段像素点;x3、x4、x5和x6分别表示x同一波段的前后左右4-邻域像素点;为回归系数;为常数项。为了便于计算,每个均匀图像块中第一列、最后一列和第一行、最后一行的像素点不参与运算,并且第一波段和最后一个波段的像素值只有一个相邻波段像素值参与计算。经过式(6)的回归模型计算后,得到像素点预测值向量为。经过线性回归得到的残差值¢()即为该点的噪声值[10]。因此,混合噪声向量¢()可表示为:
¢()=-(7)
其中,为原图像像素值向量。通过式(7),可以对各个波段图像中每个均匀图像块的每一个像素点进行混合噪声估计,从而得到准确的噪声残差。
由此,可以对各个波段均匀图像块内的像素点进行目标光谱和噪声的分离。同时,根据式(3)、(4)、(5)和(7)可以估计出任意波段内任意均匀图像块的混合噪声方差。
3.3 图像去噪及RX检测
高光谱图像光谱分辨率远远高于其他图像,它的波段越来越窄,更容易受到噪声的干扰。通过上述方法能够得到较为准确的混合噪声,然后将待测光谱减去噪声可以达到很好的去噪效果,从而更好地用于RX异常检测。由3.2节可知,噪声残差向量为¢(),待测光谱向量为,高光谱图像去噪后数据为¢。因此,有:
¢=-¢() (8)
最后,将去噪后的数据¢代入RX算子,得到最终的检测结果。
4 实验及分析
为了很好地验证本文算法,下面通过两组实验进行验证。实验一用的数据目标较多,背景单一;实验二用的数据目标较少,背景较为复杂,包含噪声较多。通过这两组实验的对比来验证本算法的异常检测效果。
4.1 实验数据及说明
实验一数据:采用美国AVIRIS传感器在1998年获取的圣迭戈机场数据作为实验数据。该图像有220个波段,地面分辨率为3.5m。首先去掉20个大气吸收的波段,然后去除11个低信噪比的噪声波段,最后用于实验的图像总共有189个波段。此时的图像大小为400×400像元,截取其含有异常目标较多的区域进行实验,即图中大小为100×100像元的区域。图像的第20波段如图3所示。
实验二数据:同样采用AVIRIS光谱仪获取的美国圣迭戈海军基地图像。针对RX算法适用于低出露目标的特性,截取大小为100×100像元的区域,包含较少的异常目标(可视为低出露目标),如图4所示。与实验一数据单一背景不同,该区域的背景较为复杂,包含噪声较多,可以更好地用来验证本文算法的有效性。
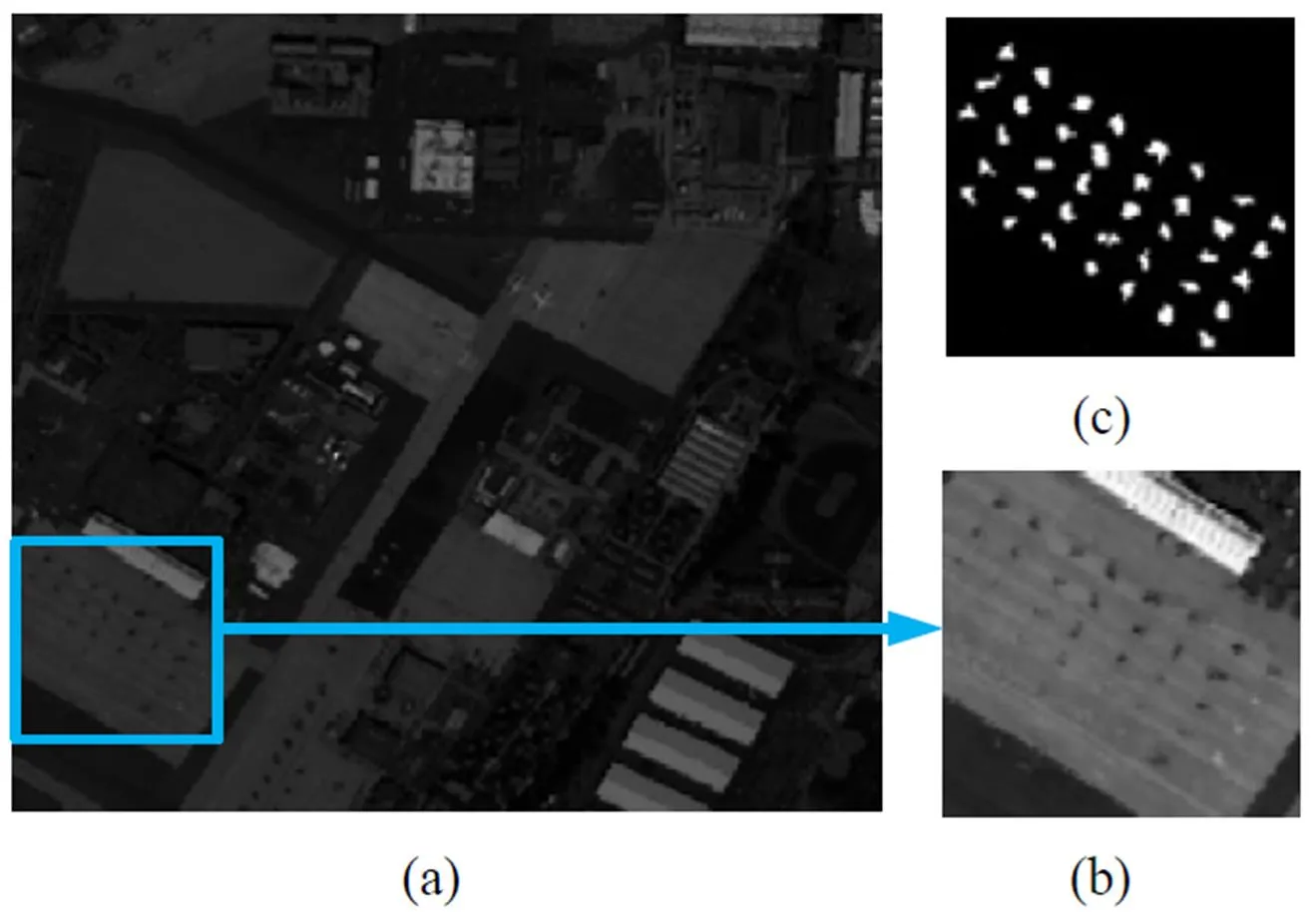
图3 实验一数据:(a)第20波段400×400像元图像,(b)第20波段100×100像元图像;(c)地面真实目标分布图
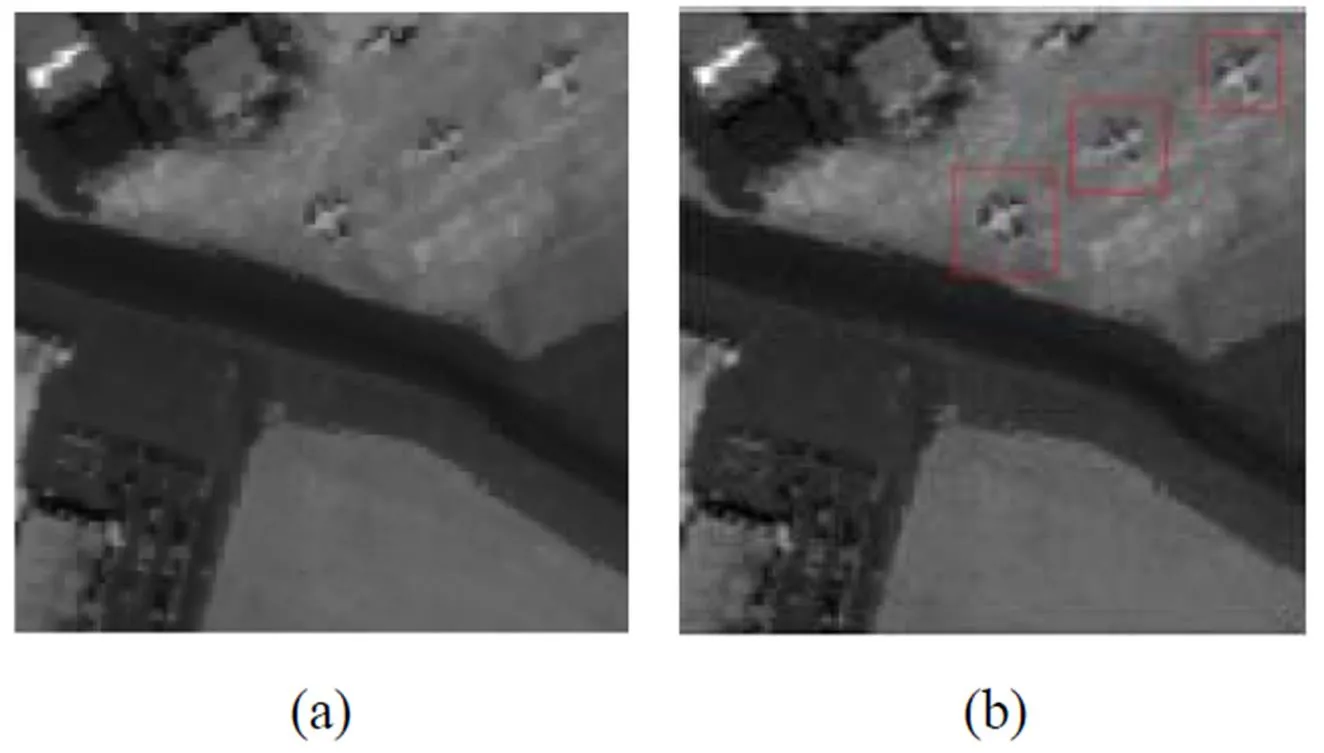
图4 实验二数据:(a)第20波段100×100像元图像;(b)地面真实目标分布图
4.2 实验结果与分析
首先根据实验步骤将图像划分为10×10像素的图像块,运用八方向窗口进行滤波,选择边缘纹理较少的图像块作为均匀图像块,以此法对每个波段进行均匀图像块的选取。图5(a)、图5(b)显示了数据一和数据二第20波段滤波后的结果,可以看出,实验一的均匀图像主要集中在左下角,实验二的均匀图像主要在右下方。选取包含边缘纹理较少的图像块作为实验的均匀图像块,数据一中选择5块,数据二中选择6块,然后分别求均值,作为最终的均匀图像块。然后运用多元线性回归方法对每一个波段的均匀图像块进行噪声评估。根据本文方法,对实验数据所有波段均匀图像块进行噪声评估,得到实验一和实验二的噪声评估结果分别如图6(a)、图6(b)所示。
由图6(a)可以看出,在大多数波段中,混合噪声方差在50~100之间;由图6(b)可知,在大多数波段中,混合噪声方差在100~150之间。通过两幅噪声评估结果图对比可知,实验二图像的噪声明显强于实验一,这与实际情况是相符的。
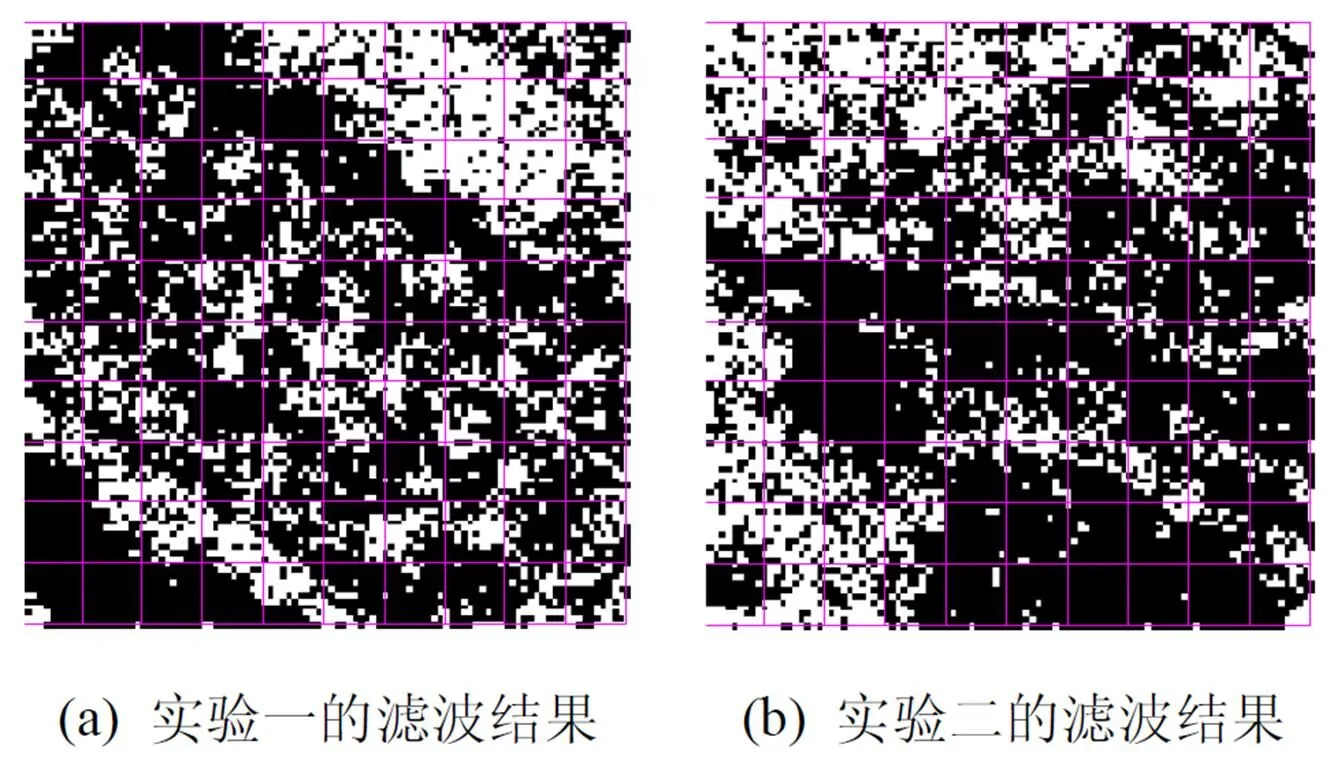
图5 第20波段图像滤波结果

图6 图像混合噪声分布
按照本文方法,将待检测的图像减去混合噪声得到去噪后的图像,然后用RX算法进行异常检测。为有效对比本文算法的检测效果,将之与RX算法和最大噪声分离RX算法(MNF-RX)进行比较,得到实验一和实验二的结果如图7、图8所示。由图3(c)可知,实验数据的真实地面目标有38个。而由实验结果图7、图8可以看出,RX算法检测精度较低具有很大的虚警率;MNF-RX算法经过最小噪声分离后进行异常检测,检测效果大大提高;而运用本文的方法具有最好的检测效果,并且能够很好地去除背景噪声,进一步在MNF-RX算法的基础上提高检测性能。
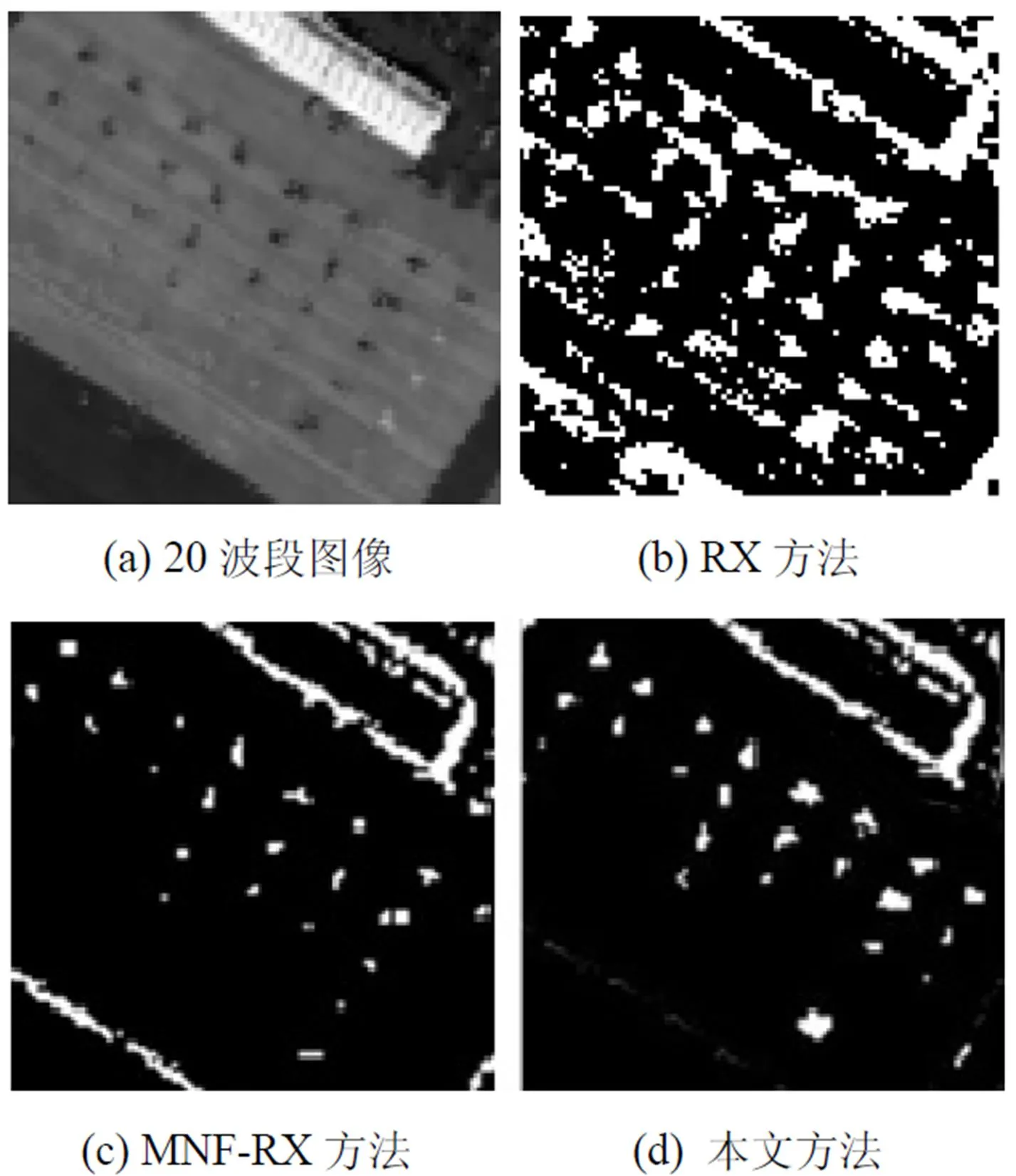
图7 实验一的检测结果对比
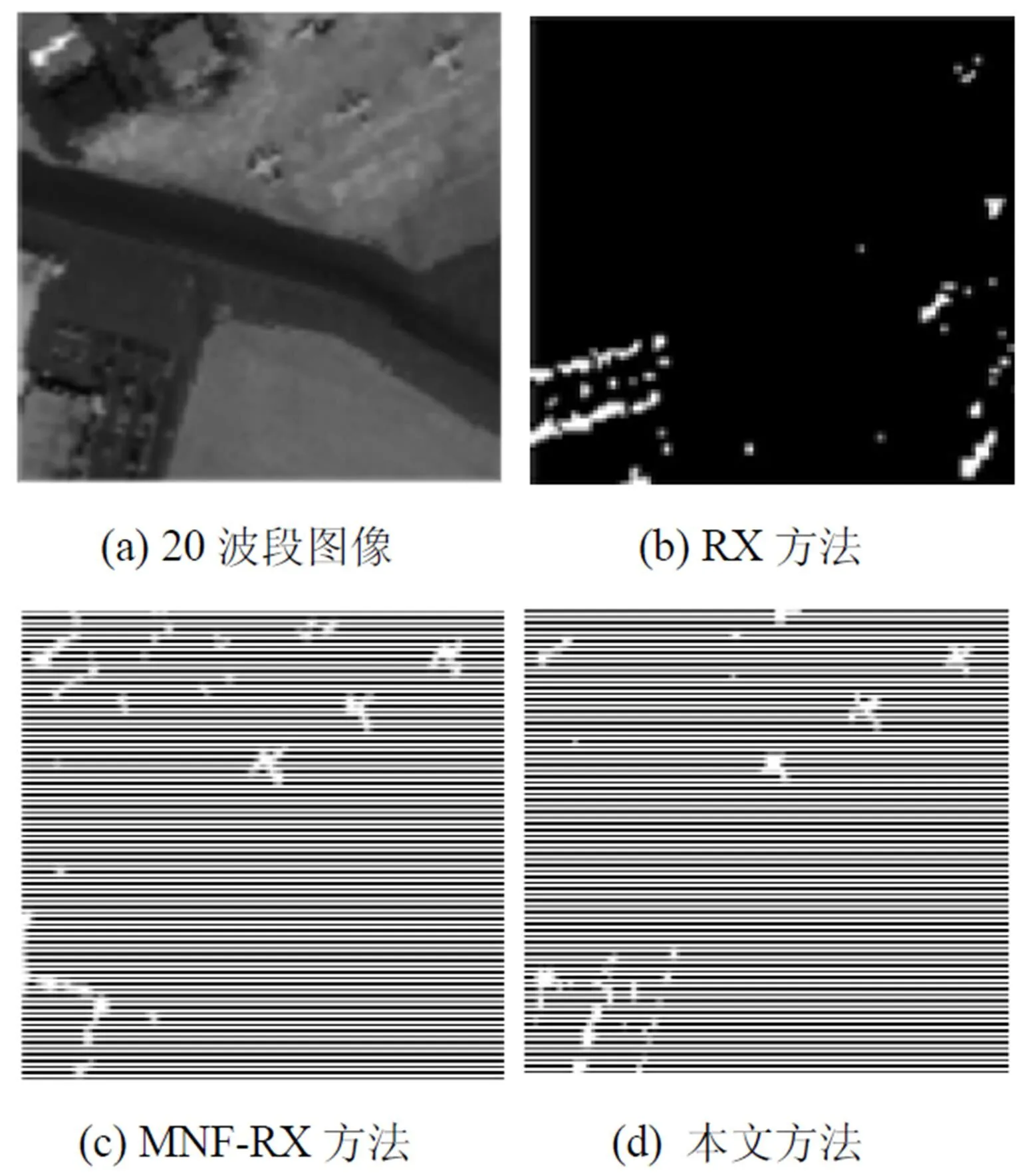
图8 实验二的检测结果对比
为了定量地衡量本文算法的检测性能,下面绘制接收机工作特性(ROC)曲线来进行比较。ROC曲线,来源于雷达中的接收机工作曲线,它描述了检测概率d和虚警概率f之间的关系,可以用于不同算法性能的定量比较。检测概率d定义为检测到的真实目标像元数目和地面真实目标像元数目的比值,虚警概率f表示检测到的不是目标像元数目与图形全部像元数目的比值。在虚警率恒定的情况下,检测概率越高,曲线越往上方,说明算法的检测性能越好。
图9给出了两组实验RX算法、MNF-RX算法和本文算法的ROC曲线。可以看出,在同等虚警率下本文算法具有更好的检测概率。
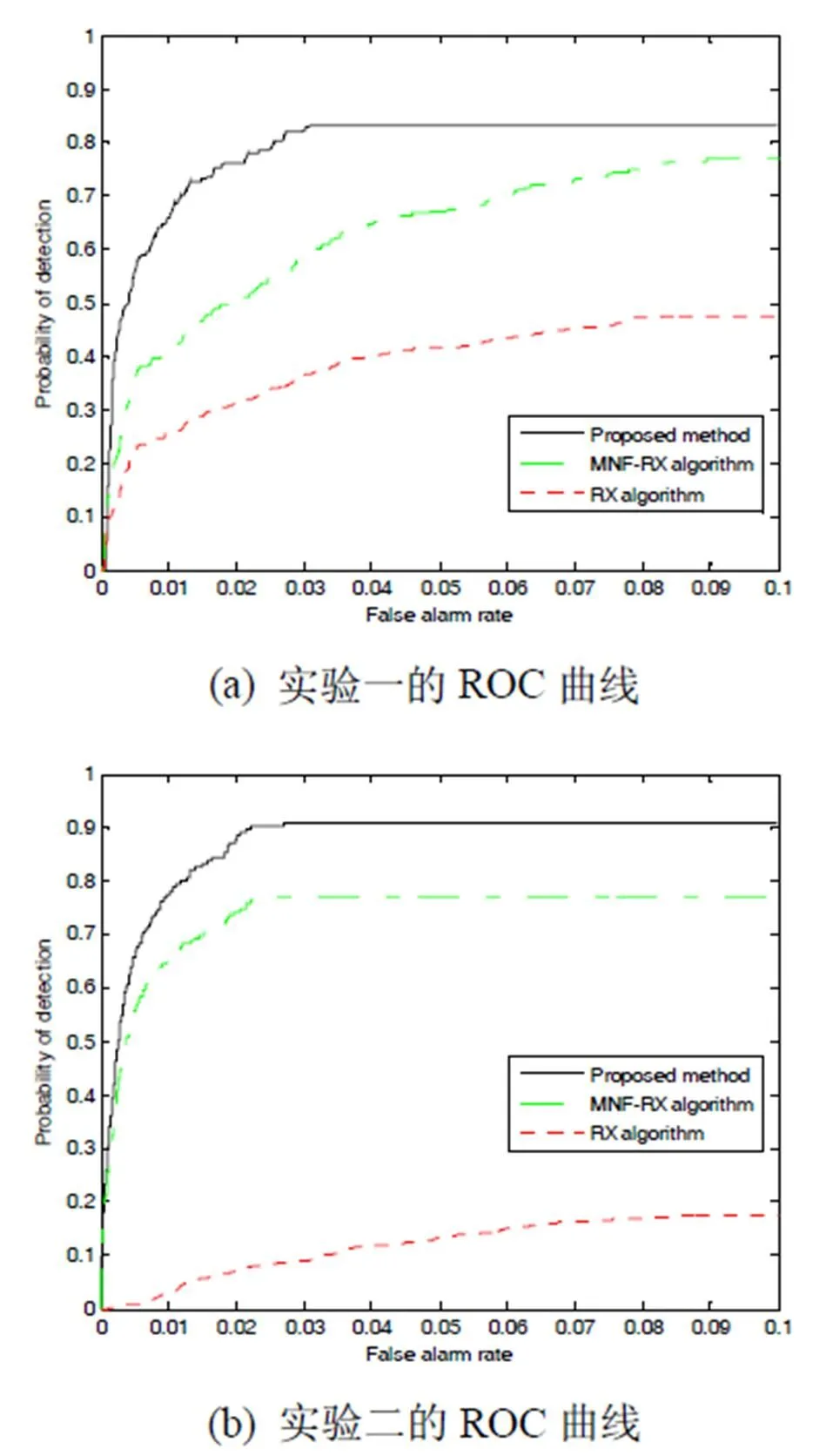
图9 两组实验的ROC曲线
由图9可知,由于实验二图像比实验一图像背景复杂、包含噪声多,因此实验一的RX检测性能优于实验二的检测性能;但是对实验图像进行噪声去除后(即MNF-RX算法和本文算法),实验二的检测性能优于实验一的检测性能。
表1给出了本文方法与RX方法以及MNF-RX方法的计算时间对比,可以看出,本文方法所消耗的时间较长,这是由前期的均匀图像块选取、混合噪声评估造成的。虽然本文方法消耗时间相对较长,但是综合ROC曲线及检测性能,本文方法仍具有较好的时效性。
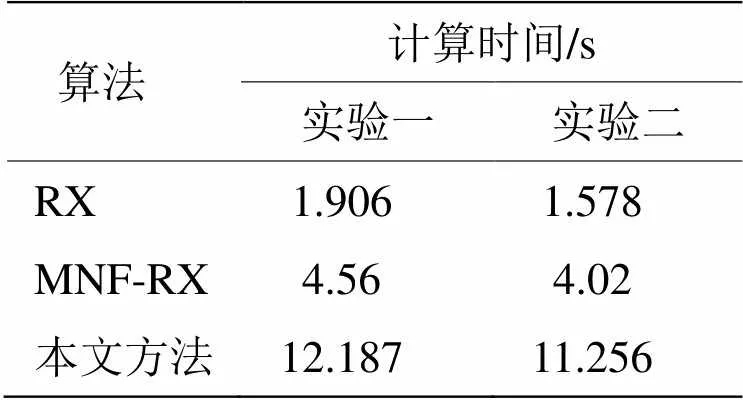
表1 3种方法计算时间
5 结论
针对高光谱图像中存在混合噪声导致RX算法检测效果不佳的问题,提出了一种基于混合噪声评估的RX异常检测算法。该方法引入了图像滤波的思想,实现了均匀图像块的选取;结合空间4-邻域和相邻光谱,实现了混合噪声的评估;最后进行了异常检测。实验结果表明,在较低虚警率下,本文算法比传统的RX算法和MNF-RX算法检测性能更好,体现了所提方法的优越性。但是由于在检测前进行了图像块滤波、混合噪声评估等操作,本文算法执行时间相对较长,这也是下一步要研究的工作。
[1] Reed IS, Yu X. Adaptive multiple-band CFAR detection of an optical pattern with unknown spectral d-istribution[J].,1990,38(10):1760-1770.
[2] ChangCI.:[M]. Kluwer Academic,2003:99-100.
[3] Heesumg Kwon. Kernel RX-Algorithm: A nonlinear anomaly detector for hyperspectral imagery[J].,2005,43(2):388-397.
[4] Foi A, Trimeche M, Katkovnik V, et al. Pratical Poissonian-Gaussion noise modelling and fitting for single-image raw-data[J]. IEEE Transactions on Image Processing, 2008, 17(10): 1737-1754.
[5] Alparone L, Selva M, Aiazzi B, et al. Signal-dependent noise modelling and estimation in new-generation imaging spectrometers[C]//:, 2009, 8: 1-4.
[6] Aiazzi B, Alparone L,Baroni S. Unsupervised estimation of signal-dependent CCD camera noise[J].,2012(1):1-11.
[7] Actio N, Diani M, Corsini G. Signal-dependent noise model and model parameter estimation in hyperspectral images[J]., 2011, 49(8): 2957-2971.
[8] Meola J,Eismann MT,Moses RL. Modeling and estimation of signal-dependent noise in hyperspectral imagery[J].,2011,50(21):3829-3846.
[9] Uss ML,Vozel B,Lukin V V.Local signal-dependent noise variance estimation from hyperspectral textureal images[J].,2011,5(3):469-486.
[10] 傅鹏, 孙权森, 纪则轩. 基于光谱-空间信息的高光谱遥感图像混合噪声评估[J]. 红外与毫米波学报, 2015, 34(2): 237-238.
FU Peng, SUN Quanseng, JI Zexuan. Mixed noise estimation of hyperspectral sensing images based on spectral-spatial information[J].o, 2015, 34(2): 237-238.
[11] Andreou C, Karathanassi V. A novel multiple end-member spectral mixture analysis using spectral angle distance[C]//2012, 2012: 4110-4113.
[12] 孟玉. 基于同质区域分割的高光谱图像混合噪声估计[J]. 计算机与现代化, 2014(2): 77-80.
MENG Yu. Mixed noise estimation of hyperspectralimages based on homogeneous region segmentation[J]., 2014(2): 77-80.
[13] Sobel I. Neighborhood coding of binary images for fast contour following and general binary array processing[J]., 1978, 8(1): 127-135.
[14] Otsu N. A threshold selection method from gray-level histograms[J].,1975,9(1):62-66.
A Mixed-Noise Estimation-Based Anomaly Detection Method for Hyperspectral Image
XIANG Yingjie,ZHANG Jianfeng,YANG Guang,WANG Qi
(,130000,)
With a higher spectral resolution, hyperspectral images are more susceptible to noise; furthermore, conventional detection operators generate a high rate of false alarms. Aiming to overcome the problem of large noise interference as related to the RX algorithm, a new method of RX anomaly detection based on mixed noise is proposed. First, a hyperspectral image is divided into blocks, and a uniform block is selected via filtering. The mixed noise is estimated by performing multiple linear regression analysis, which considers spectral and spatial information, on the uniform image block. Then, the estimated mixed noise is subtracted from the hyperspectral image to eliminate noise interference. Finally, anomaly detection is performed by implementing the RX algorithm. The experimental results showed that the proposed method effectively eliminates noise and achieves better detection performance than that of RX and MNF-RX algorithms.
hyperspectral imagery,anomaly detection,mixed noise estimation,multiple linear regression,RX
TP751.1
A
1001-8891(2017)08-0734-06
2016-11-17;
2016-12-29.
向英杰(1993-),男,硕士研究生,主要研究方向为高光谱图像解译。E-mail:xyjandsy@163.com。
杨桄(1975-),男,博士后,教授,主要从事遥感图像解译、地理信息系统等方面研究。E-mail:yg2599@126.com。
吉林省教育厅“十二五”科研项目(2015448);吉林省科技发展计划资助项目(20140101213JC)。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
航天返回与遥感(2022年2期)2022-05-12
空间科学学报(2021年1期)2021-05-22
电子制作(2018年2期)2018-04-18
制导与引信(2017年3期)2017-11-02
中国光学(2015年5期)2015-12-09
海军航空大学学报(2015年1期)2015-11-11
西藏科技(2015年4期)2015-09-26
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
