
无人机改进导航定位方法设计
2017-03-25 17:01唐娅娟王晶所玉君
科技与创新 2017年4期
关键词:无人机
唐娅娟++王晶++所玉君


文章编号:2095-6835(2017)04-0023-03
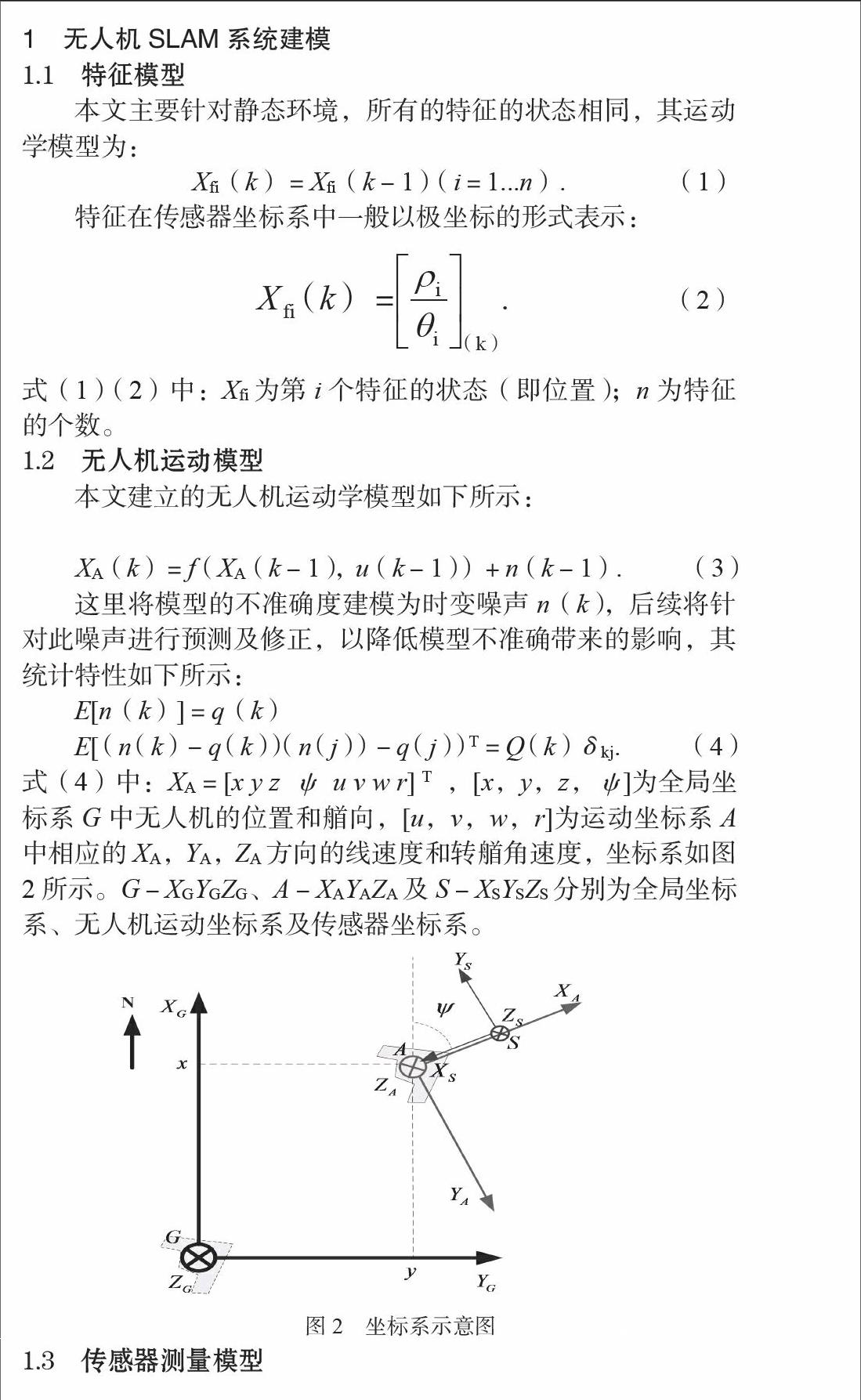
摘 要:针对无人机航位推算过程中由于传感器精度限制及运动模型不准确导致其位置估计误差累积问题,设计一种利用对地面路标的观测来修正自身位置的同步定位与构图方法,同时将模型不准确建模为时变的过程噪声,通过对过程噪声统计特性的预测及修正来提高模型的准确度。建立了特征模型、无人机运动模型及传感器测量模型,利用试验数据对所提方法进行了仿真验证,结果表明所提方法降低了模型不准确对无人机导航定位精度的影响,在传感器精度不高的情况下,降低了误差累积程度,提高了无人机导航定位的精确性和鲁棒性。
关键词:无人机;航位推算;时变噪声;同步定位与构图
中图分类号:TP242.6 文献标识码:A DOI:10.15913/j.cnki.kjycx.2017.04.023
近年来,无人机在军事民事领域得到了越来越多的应用,无人机的导航问题是限制其发展的决定性因素,惯性导航、卫星导航、地磁导航、航位推算及组合导航是目前常用的导航方法。惯性导航短时间内精度较高,但是初始对准困难;常用的卫星导航为GPS导航,精度高,但是容易受到干扰;地磁导航全天时、全天候,但是需要存储大量的地磁数据,对计算机的存储能力及数据处理能力要求高;航位推算造价低廉,是最为常用的方法,但是位置估计误差随时间迅速累积增长;组合导航即将上述方法中的2种或多种加以组合使用。
同步定位与构图(Simultaneous Localization and Mapping,SLAM)是一种新兴的无人机导航定位技术,国外学者对该方法已经进行了一系列研究,但是国内对SLAM的研究相对于国外差距还很大,多数研究限制在移动机器人领域。下面描述无人机SLAM方法的执行过程。
飞行的无人机由于航位推算引入噪声,或者由于建立运动模型的不准确,位置估计误差逐渐积累,导致无人机的航位推算误差越来越大,如图1(a)所示,椭圆越来越大,即无人机自身和地图位置的不确定性越来越大。通过SLAM方法进行导航定位的无人机通过对地图中元素的反复测量,能够修正自身的位置。当无人机测量到一个新特征时,首先需要通过数据关联来判断这个新观测特征是否对应着地图中的已有特征,见图1(b)。如果对应着,则利用这次新测量来校正无人机自身及特征的位置,见图1(c);否则,将这个特征构建到地图中。
(a)不确定性增长
(b)新的测量 (c)位置校正
4 结论
建立了无人机的运动模型和观测模型,设计了改进的无人机同步定位与构图方法,将所建立运动模型的不准确性建模为时变噪声,通过对其统计特性进行估计校正来弥补模型构建的不足,并利用试验数据对所提方法进行仿真验证。结果表明,所设计方法在低传感器精度的情况下相对于航位推算,定位精
度有大幅度提高,算法的可行性及有效性得到了验证,对于无人机执行长航时隐蔽作业具有一定的实际应用意义。
参考文献
[1]Durrant-Whyte H F,Bailey T.Simultaneous localization and mapping(SLAM):Part I,The essential algorithms.IEEE Robotics and Automation Magazine,2006,13(2):99-108.
[2]Bailey T,Durrant-Whyte H F.Simultaneous localization and mapping(SLAM):Part II,State of the art.IEEE Robotics and Automation Magazine,2006,13(3):108-117.
[3]Bailey T,Nebot E M,Rosenblatt J K,et al.Data association for mobile robot navigation:A graph theoretic approach[C]//Proceedings of the IEEE International Conference on Robotics and Automation San Francisco.USA:2000:2512-2517.
[4]Hahnel D,Thrun S,Wegbreit B,et al.Towards lazy data association in SLAM[C]//Proceedings of the International Symposium on Robotics Research.Sienna,Italy:2003:421-431.
[5]黃庆成,洪炳熔,厉茂海,等.基于主动环形闭合约束的移动机器人分层同时定位和地图创建[J].计算机研究与发展,2007,44(4):636-642.
[6]张亮,蒋荣欣,陈耀武.移动机器人在未知环境下的同步定位与地图重建方法[J].控制与决策,2010,25(4):515-520.
[7]Smith R,Self M. Cheeseman P.Estimation uncertain spatial relationships in robotics [C]//Autonomous Robot Vehicles.New York:Springer-Verlag,1990:167-193.
〔编辑:刘晓芳〕
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21
新教育时代·教师版(2016年27期)2016-12-06
农机使用与维修(2016年10期)2016-11-10
人间(2016年26期)2016-11-03
科技视界(2016年22期)2016-10-18
企业导报(2016年9期)2016-05-26
