基于WIFI的挂车手机遥控系统研究
2017-03-30 01:04严东余佳俸海翔王力波
专用汽车 2017年3期
严东 余佳 俸海翔 王力波
湖北三江航天万山特种车辆有限公司 湖北孝感 432000
基于WIFI的挂车手机遥控系统研究
严东 余佳 俸海翔 王力波
湖北三江航天万山特种车辆有限公司 湖北孝感 432000
针对挂车远程操作升降和转向的需求,分析了挂车升降和转向的控制原理,设计了一套手机遥控系统和一款手机应用程序,采用无线局域网技术和CAN总线技术,实现了手机操纵挂车升降和转向,达到了设计要求。
手机遥控 无线局域网 CAN总线
1 前言
本文所述的挂车主要用于大件物流运输行业进行风电叶片、变压器等大型设备的运输。该挂车由牵引车、动力鹅颈和液压板组成,在动力鹅颈上配置有手动转向和升降电磁阀。在路面弯道过急或者液压板出现倾斜时需要人工操作电磁阀进行转向和升降,此时操作人员需靠近载有货物的车体,对人身安全会造成很大的隐患,因此有必要开发一款能够进行挂车转向和升降的远程遥控系统。本文设计的基于WIFI的手机遥控系统应用无线通讯技术,可以使操作人员在不靠近车体的情况下控制车辆的转向和升降。
2 技术方案
2.1 转向/升降原理分析
液压系统工作后,手机遥控系统产生24 V高电平控制信号,该信号加载到三位四通电磁阀线圈。通过控制电磁阀线圈的得电情况,使电磁阀阀芯左移或者右移,油缸伸缩或者收回,从而进行转向或升降的动作。转向/升降原理如图1所示。
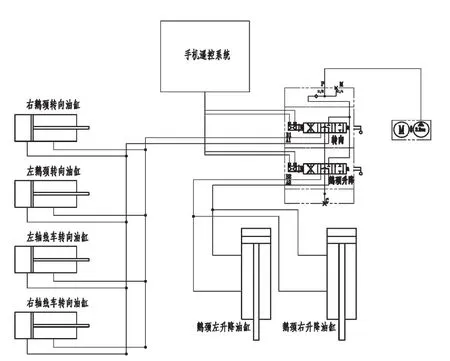
图1 转向/升降原理图
2.2 手机遥控系统
手机遥控器系统主要由安卓系统的手机APP、WIFI转CAN模块、车用控制器、CAN总线连接线束组成。WIFI转CAN模块和车用控制器根据布线方便,安装在动力鹅颈上接线盒内,天线安装在车架上方,四周无遮挡,手机遥控范围小于10 m[1]。组成框图如图2所示。

图2 手机遥控系统组成框图
手机连接至WIFI转CAN模块建立的局域网,操作人员在APP界面进行手机操作,将操作指令通过WIFI发送至WIFI转CAN模块,转换成符合CAN协议的数据报文,车用控制器接收该数据报文后通过控制器I/O端口输出控制信号至电磁阀。
2.2.1 手机APP设计
手机APP采用Android Studio 2.2.2+ Android SDK 4.4+Android NDK r10 集成开发环境,要求Android手机最低版本为4.4,使用Java高级语言开发,程序采用命令和抽象工厂两种设计模式构架而成,该设计模式的优点在于只需要修改单独的执行命令的类和模块而不用修改其他核心类和模块,保证了程序的健壮性、可执行性、易读性和易维护性。
该程序的基本原理是:用户打开应用程序,程序会先搜索CANWIFI-200T模块的WIFI热点,待连接成功后,程序自动匹配连接CANWIFI-200T模块的IP地址,然后提示用户连接成功。连接成功后,程序会每隔20 ms循环发送1Byte的“00”数据给CANWIFI-200T模块,表示程序并未按下任何键,当用户按下手机相对应的按钮时,会先触发一个震动反馈,然后循环发送表1中约束的数据,当用户抬起按钮时,程序会继续发送“00”。手机界面采用XML语言编写,可适应所有手机机型及分辨率。应用程序基本原理如图3所示,应用程序界面如图4所示。
2.2.2 WIFI转CAN模块
WIFI转CAN模块采用某公司的CANWIFI-200T高性能两通道WIFI转CAN转换器。利用配置软件配置局域网密码,只有有权限的人员才能接入到局域网。转换器接线简单,电源可以直接采用车用24 V直流电源供电,总线端接入车用控制系统即可。转换模块外形与接线如图5所示。
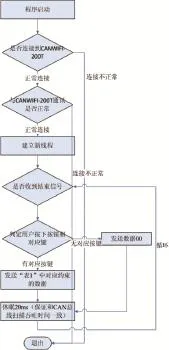
图3 应用程序设计原理

图4 应用程序界面

图5 转换模块外形与接线图
经过WIFI转CAN模块转换的CAN总线数据如表1所示。

表1 CAN总线数据表
2.2.3 车用控制器
车用控制器采用IFM公司CR0403基本控制器,该控制器体积小,应用简单,12路输入和12路输出,适合挂车上执行元件不多的场合。CR0403接线如图6所示。
2.2.4 控制软件设计
控制器初始化后判断CAN转WIFI模块与车用控制器通讯是否正常,若出现通讯故障则没有任何输出,电磁阀无动作,进行软件保护;若总线正常,根据总线数据解析操作指令进行相应的输出。
将整个控制软件分为若干子程序模块,如CAN数据接收,输出控制等。在Codesys2.3软件新建工程文件,定义不同的POU子程序,通过结构文本语言进行程序设计,实现各个模块的功能[2]。程序中POU名称、功能和编程语言如表2所示。
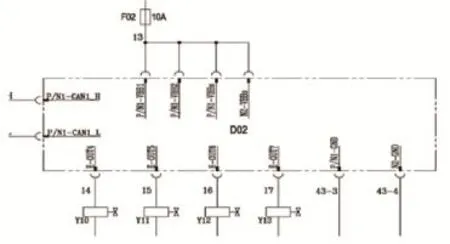
图6 CR0403接线图
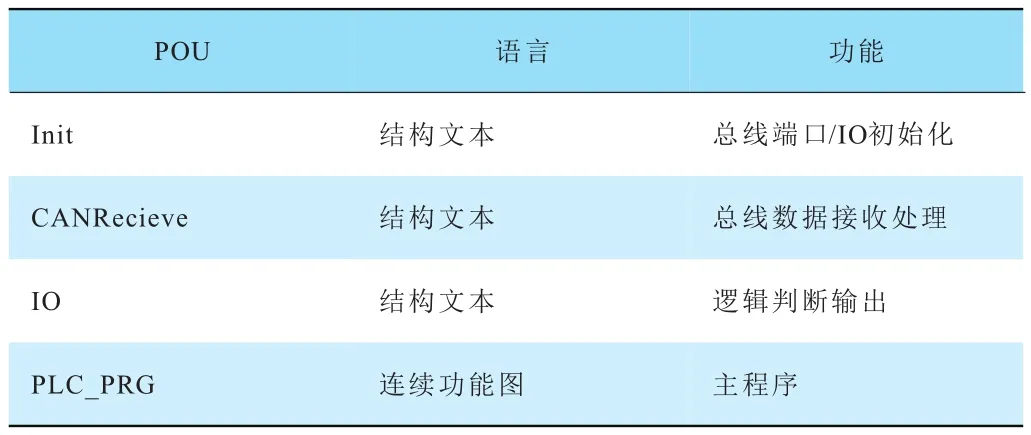
表2 POU名称、功能和编程语言
2.2.5 试验验证
为验证控制系统的正确性,采用某公司生产的8轴线挂车为控制对象,如图7所示,加装手机控制系统,通过手机APP操作模块车左转、右转、上升和下降动作。试验表明控制系统能够正确地控制模块车进行左转、右转、上升和下降动作。

图7 8轴线挂车
3 结语
本文针对当前普通挂车智能化操作的需求,结合Codesys编程软件,设计了基于WIFI的手机APP智控系统。首先利用WIFI转CAN模块进行数据转换,得到了控制系统需要的CAN数据,并利用Codesys软件对控制程序所需要的功能进行设计和试验,最后结合具体实物对程序进行试验验证,验证了控制系统及设计程序的正确性。
[1] 罗峰,孙泽昌.汽车CAN总线系统原理、设计及应用[M].北京:电子工业出版社,2010.
[2] 张博,丁冲,黄兆秋等.基于CoDeSys的桥式起重机智能运行控制系统设计[J].工程机械与维修,2014 (z1):262-270.
Research of Mobile Phone Remote Control System Based on WIFI
YAN Dong et al
According to the demand analysis of remote operation trailer,trailer lifting and steering control principle,designed a mobile phone remote control system and design a mobile phone operation using wireless LAN technology and CAN bus technology,the mobile phone operation Trailer lifting and steering purpose,meet the design requirements.
mobile phone remote control; wireless LAN; CAN bus
U469.5+3.03
A
1004-0226(2017)03-0090-03
严东,男,1990年生,工程师,现从事特种车辆电控技术开发工作。
2016-11-12
猜你喜欢
军民两用技术与产品(2022年4期)2022-06-28
舰船科学技术(2022年10期)2022-06-17
汽车实用技术(2022年10期)2022-06-09
小学生优秀作文(低年级)(2021年11期)2021-12-06
汽车与驾驶维修(维修版)(2019年3期)2019-05-08
语文世界(小学版)(2019年2期)2019-02-24
小猕猴智力画刊(2018年2期)2018-02-26
小天使·一年级语数英综合(2014年7期)2014-06-26
汽车与新动力(2014年6期)2014-02-27
汽车与新动力(2014年5期)2014-02-27