高精度经纬仪与CCD相结合的星模拟器星点位置测量系统设计
2017-03-30 08:11姜文璋张国玉孙高飞胡冰
长春理工大学学报(自然科学版) 2017年1期
姜文璋,张国玉,孙高飞,胡冰
(长春理工大学光电工程学院,长春 130022)
高精度经纬仪与CCD相结合的星模拟器星点位置测量系统设计
姜文璋,张国玉,孙高飞,胡冰
(长春理工大学光电工程学院,长春 130022)
为实现对星模拟器星点位置的测量,建立了高精度经纬仪与CCD相结合的新测量系统。首先,莱卡TM6100A型高精度经纬仪实现星点搜索和定位,然后利用ZEMAX优化的星点成像光学系统完成经纬仪与ICX618ALA型面阵CCD芯片的光学衔接,通过EP2C8T144C8N型FPGA完成星点图像信息采集、处理和传输的控制,最后利用MATLAB根据平方加权质心算法完成星点提取。根据光学系统像差和星点提取仿真分析,总结了系统的理论误差分析结果。结果表明:该测量系统不受视场限制且星点位置测量误差为4.66'',满足测量范围为±12°视场,单星位置误差测量精度优于5''的要求。
星点位置测量;高精度经纬仪;CCD成像;平方加权质心算法
星模拟器是星敏感器的地面标定设备,其精度水平直接影响星敏感器标定的准确性,进而决定空间探测器姿态测量的精确性[1],故对星模拟器的精度检测尤为重要。单星位置误差是星模拟器的关键技术指标,传统的测试方法有人工经纬仪星点定位法和星敏感器式CCD星点图像定位法。
人工经纬仪星点定位法利用人眼通过经纬仪对星模拟器的星点逐一进行查找定位,因高精度经纬仪具有0.5''极高的测角精度且数据处理简单而作为常用测量方法,其缺点是受人为因素影响较大,重复测量效率低,同时人眼取几何中心的星点定位法造成人眼读数误差。星敏感器式CCD星点图像定位法利用面阵CCD通过对整幅星点图像采集和星点提取来获得星点位置信息,效率高,可靠性好,但随着系统视场的增大,光学系统误差会极大地降低测量系统的测量精度,如美国BALL公司的CT系列产品,当系统视场从8°增大到10°时,测角精度从3''下降到15''[2]。基于以上分析,本文提出了高精度经纬仪与CCD相结合的星模拟器星点位置测量系统,该系统具有经纬仪高测角精度和不受视场限制的优点,同时采用面阵CCD代替人眼读数消除人眼读数误差,提高测量效率的同时增加了可靠性。
1 系统总体组成及其工作原理
高精度经纬仪与CCD相结合的星模拟器星点位置测量系统,由经纬仪、星点成像光学系统、CCD成像控制系统和计算机数据处理系统组成[3],系统总体组成框图如图1所示。

图1 系统总体组成框图
测量时,将高精度经纬仪搭架于星模拟器的工作距离处。星点成像光学系统置于高精度经纬仪目镜出瞳处,将高精度经纬仪内的星像点成像在位于焦平面处的面阵CCD光电传感器上,CCD光电传感器通过光电转换作用,将星点亮度信息转化为电信号进行存储和转移。然后利用CCD成像控制系统完成对星点的亮度信息采集,并传送给计算机。最后利用计算机数据处理系统,根据软件星点提取算法,平方加权质心算法完成星点提取,获得星点位置信息。
2 分系统设计
2.1 星点成像光学系统优化设计
星点成像光学系统通过捕捉高精度经纬仪视场中心的星像点来确定星点的位置信息,故要求设计的光学系统具有良好的成像质量,较小的畸变和球差,满足高像质要求。星点成像光学系统需要和高精度经纬仪配合使用,两者连接图如图2所示。
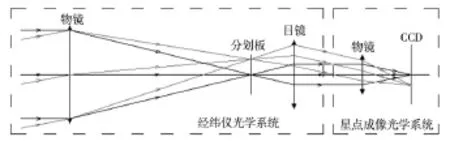
图2 光学系统连接图
高精度经纬仪目镜是出瞳外置的光学结构,由光阑衔接原则可知星点成像光学系统中物镜系统的光学结构也是光阑外置的,受经纬仪光学系统和成像面尺寸大小限制,确定的光学系统主要技术指标如表1所示。
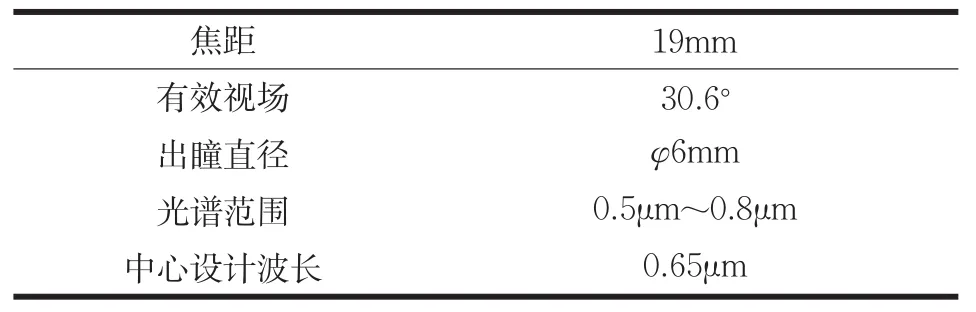
表1 星点成像光学系统技术指标
星点成像光学系统属于反向设计,出瞳距即为系统设计时孔径光阑位置。利用ZEMAX进行光学系统的优化设计。优化后的星点成像光学系统光路图如图3所示。优化后光学系统的MTF值在90lp/ mm处大于0.6,全视场畸变均小于0.1%,球差小于0.05,故设计的星点成像光学系统能够满足高像质成像的要求。

图3 优化后的星点成像光学系统光路图
2.2 CCD成像控制系统设计
CCD成像控制系统由面阵CCD、时序控制器(FPGA)、CCD驱动电路、视频信号处理电路和接口电路组成,系统框图如图4所示。
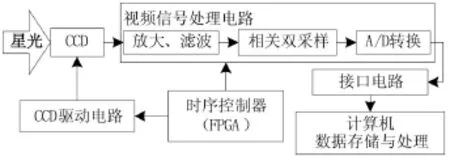
图4 CCD成像控制系统框图
面阵CCD用于成像经纬仪小视场内单星星点图像,采用1/4英寸型ICX618ALA芯片,其有效像素为659(H)×494(V),像元尺寸为5.6μm×5.6μm,像面尺寸4.46mm(H)×3.80mm(V)。CCD在驱动脉冲的控制下启动一帧拍摄过程,将星光信号转换为与光强成正比的电信号(称为视频信号),通过USB接口接收增益、偏置、积分时间等参数。时序控制器由EP2C8T144C8N型FPGA实现,是系统的控制中心,负责产生CCD工作时序信,生成采样时序、配置视频信号处理器等同步信号。为提高系统稳定性,简化电路设计,驱动电路和视频信号处理电路由专用芯片CXD1267和AD9945构成。CCD驱动电路将CCD工作时序信号转换成CCD驱动脉冲。视频信号处理电路将视频信号进行放大、滤波及相关双采样(eds)等处理后,由12位A/D转换器转换为灰度数据,并通过USB接口电路将测量数据送给计算机。最后利用计算机数据处理系统,根据星点位置与像素灰度值大小和平方加权质心算法计算出星点的精确位置,完成星点位置测量[4]。
2.3 平方加权星点提取算法分析
高精度经纬仪与CCD相结合的星模拟器星点位置测量系统的测量精度,不仅取决于硬件特性(如高精度经纬仪测角精度、光学系统误差、CCD的参数性能等等),还取决于所采用的软件算法[5]。
对于星点成像光学系统和CCD成像控制系统己经确定的星模拟器星点位置测量系统,为获得更高的测量精度,可以采取超精度亚像元内插细分算法,在软件上实现更高精度的星点位置测量[6]。常见的星点目标提取方法主要包括质心法和高斯曲面拟合法等,质心法是较为成熟且运用广泛的星点亚像元细分定位方法,许多星点提取的研究成果都是在此基础上获得的。利用质心法进行星点提取的方法主要包括传统的灰度质心法、带阈值的灰度质心法以及平方加权质心法。后两种方法其实是传统灰度质心法的改进,文献[7]总结提出了各种灰度质心法的统一计算模型为:
同时指出,当T为背景灰度,k=2时,质心提取的精度达到极值点。相比高斯曲面拟合方法,质心法更具实用性,本文用于星点提取的方法就是平方加权质心法。
进行星点模拟提取实验有助于对星点提取算法精度的分析,星点典型能量分布可以近似为高斯点扩散函数[8],方程为:

其中:(xc,yc)为函数曲面中心点;σPSF为高斯弥散半径。
实验中,利用MATLAB进行星点图像模拟,为星点提取提供图像数据。为更真实模拟星点成像特性,设星点中心真实坐标(xc,yc)于(26,26)附近,高斯弥散半径σPSF为15像元,像元尺寸为10μm。仿真过程中加入(0,0.12)的高斯白噪声影响,星点能量分布图及模拟星点图如图5所示。星点提取过程采用30×30像元窗口,利用平方加权质心法计算星点中心,提取出星点坐标为(x0,y0),则星点提取算法误差为:

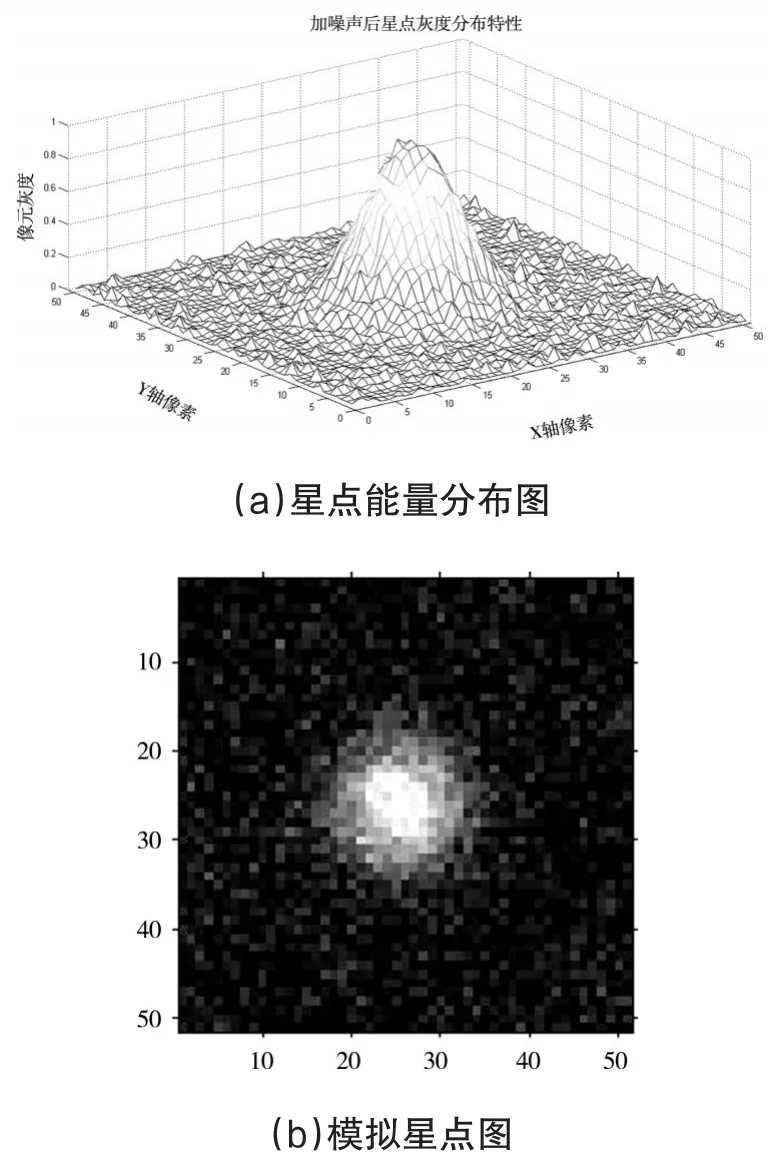
图5 加高斯噪声星点图像模拟
模拟仿真实验数据与加权质心提取算法的误差结果见表2。从结果中可看出,平方加权质心算法精度平均达到0.06像元,则由质心算法引起的星点位置提取误差Δy1=0.0006mm。

表2 星点提取结果
3 测量系统误差理论分析
高精度经纬仪与CCD相结合的星模拟器星点位置测量系统的测量误差包括高精度经纬仪测角误差,星点成像光学系统成像误差和平方加权星点提取算法带来的误差。
在使用高精度经纬仪测量星点位置及星间角距时受到空气和大地震动的影响,对高精度经纬仪造成的测量误差为γ1=0.72''。受高精度经纬仪最小测量精度γ2=0.5''的影响。计算出高精度经纬仪的测角误差为:

星点成像光学系统通过捕捉高精度经纬仪视场中心的星像点来确定星点的位置信息,需考虑中心视场5°范围内的星点成像误差即可。本测量系统中设计的星点成像光学系统,通过查看评价函数PIMX和CENY得出视场为5°时,星像点能量中心和主光线的像高分别为6.560mm和6.559mm。通过作差,可以得出由光学系统引起的测量误差为Δy2=0.001mm。
则通过公式(5)和公式(6)可分别算出星点质心在y方向上的偏移量Δy和角度误差Δω。其中,Δy1为星点提取算法误差;Δy2为光学系统误差。

其中,f′为光学系统的焦距19mm;y为星点像高0.873mm。

通过理论分析可以得出高精度经纬仪与CCD相结合的星模拟器星点位置测量系统的测量精度为:

4 结论
本文在对现有的传统星模拟器星点位置测量方法的优、缺点进行总结后,提出了基于高精度经纬仪与CCD相结合的星模拟器星点位置测量系统,并对系统组成和工作原理进行简要介绍。为证明系统的高精度性,分别对影响测量精度的光学系统和平方加权质心算法误差进行优化设计和模拟实验验证。通过理论误差分析,该测量系统不受视场限制且星点位置测量误差为4.66'',证实了该测量系统能够满足在±12°视场,星点位置误差测量精度优于5''的技术指标要求。
[1]孙高飞,张国玉,郑茹,等.星敏感器标定方法的研究现状与发展趋势[J].长春理工大学学报:自然科学版,2010,33(4):8-14.
[2]林子棋.星模拟器检测技术研究[D].长春:长春理工大学,2011.
[3]姜文璋.星模拟器精度测试方法研究[D].长春:长春理工大学,2017.
[4]徐秀芳,胡晓东,陈良益,等.高精度激光自准直经纬仪CCD电子测量技术[J].电子测量技术,2001,24(1):1-3.
[5]Wang Haiyong,Xu Ershuai,Li Zhifeng,et al.Gaussiananalyticcentroidingmethodofstarimageof star tracker[J].Advances In Space Research,2015,56(10):2196-2205.
[6]连月勇,张超,谢宗特.星点亚像元细分定位精度分析[J].测绘科学技术学报,2015,32(6):578-582.
[7]杨成鹏.基于CCD的星体识别算法及应用研究[D].大连:大连海事大学,2011.
[8]姚大雷,汶德胜.适用于星敏感器的星体识别研究[J].长春理工大学学报:自然科学版,2008,31(1):71-73.
Design of Star Simulator’s Star Position Measurement System Combing High-precision Theodolite with CCD
JIANG Wenzhang,ZHANG Guoyu,SUN Gaofei,HU Bing
(School of Optoelectronic Engineering,Changchun University of Science and Technology,Changchun 130022)
In order to realize the star position measurement of star simulator,a new measurement system combing high-precision theodolite with CCD is established.First of all,the LEICA TM6100A high-precision theodolite is used to search and position star,and then star imaging optical system optimized by ZEMAX is used to realize the optical connecting of theodolite and ICX618AL plane array CCD chip.The acquisition,processing and transmission of star image information is controlled by EP2C8T144C8N type FPGA.Finally,the star is extracted by using MATLAB according to square weighted centroid algorithm.According to the analysis of optical system aberration and star extraction simulation,the theoretical error of system is summarized.The result shows that the star position measurement error of this system is4.66'',and it is not limited by the field of view.It can satisfy the measurement system requirement of single star position measurement accuracy is better than5'',with the measurement range for±12°field of view.
star position measurement;high-precision theodolite;CCD imaging;square weighted centroid algorithm
TN202
A
1672-9870(2017)01-0068-04
2016-10-15
姜文璋(1992-),女,硕士研究生,E-mail:15140410525@163.com
张国玉(1962-),男,教授,博士生导师,E-mail:zh_guoyu@yahoo.com.cn
猜你喜欢
宇航计测技术(2022年2期)2022-06-01
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
测控技术(2018年3期)2018-11-25
百科探秘·航空航天(2016年9期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
中成药(2016年8期)2016-05-17
中成药(2016年4期)2016-05-17
装备环境工程(2015年5期)2015-02-28