光束法空中三角测量数据处理及精度分析
2017-04-10 11:23罗勇
长沙航空职业技术学院学报 2017年1期
罗 勇
(长江工程职业技术学院,湖北 武汉 430212)
光束法空中三角测量数据处理及精度分析
罗 勇
(长江工程职业技术学院,湖北 武汉 430212)
空中三角测量的精度是无人机在摄影测量过程中的重要指标,像片处理中各环节都影响摄影成果的质量,空中三角测量的方法是其重要的影响因素。目前空中三角测量方法有三种,其中光束法区域网平差更为严密,应用也最为广泛。介绍光束法平差中解决一般粗差点及特殊粗差点的处理方法,并通过实例分析了控制点数量对成果精度的影响。
数字摄影测量;光束法平差;精度分析
早期的无人机是作为军事靶机而进行应用的,随着计算机技术、通讯科技以及微电路科技的发展,无人机作为一种飞行平台已发展成集数字化、轻材料和探测传感器于一体的新型技术,目前,国产多元化、多用途的无人机不断被生产出来,利用无人机进行地理数据信息测量,逐渐成为当前重要的地形数据获取方式。特别是无人机搭载摄影传感器能在复杂地形与恶劣气候条件下能获取精准的数据信息的能力,大大提高了外业数据采集的效率,但数据处理中粗差剔除和控制点的数量直接对光束法空中三角测量精度产生较大的影响。
1 光束法空中三角测量原理
光束法区域网空中三角测量是以每张像片组成的一束光线作为平差的基本单元,以共线方程作为平差的基础方程,通过各个光束在空中的旋转和平移,使模型之间公共点的光线实现最佳交会,并使整个区域纳入到已知的控制点的地面坐标系中,最后通过建立全区域统一的误差方程式,整体解求全区域内每张像片的六个外方位元素以及所有待求点的地面坐标,原理图如图1所示。主要内容包括根据共线方程求解每张像片的外方位元素,并按照空间前方交会求出地面点的地面坐标。

图1 光束法区域网空中三角测量原理图
2 光束法空中三角测量数据处理流程
1)相机畸变差纠正:将检测机构测定的镜头畸变改正数导入,并进行纠正;
2)航拍的数据准备:影像数据、POS数据、像控点坐标、摄影地区信息等相关数据的整理;
3)金字塔影像的创建:原始影像按一定规则生成的由细到粗不同分辨率的影像集,创建金字塔影像提高了影像的匹配速度和稳定性;
4)相对定向:采集相邻像片上的同名点,利用匹配算法进行匹配,得到相对定向后的点集;
5)控制点量测:引入控制点时,在像片上对控制点进行量测;
6)区域网平差:第一步进行自由网平差,剔除粗差点,第二部引入控制点进行网平差;
7)绝对定向:计算出各像片的外方位元素,并求出像片点的地面坐标值。
3 光束空中三角测量实例分析
本项目旨在高山城址位于四川省成都市大邑县三岔镇高山社区3组古城埂村,地处成都平原的西南边缘,本次测绘面积为9km2,地理坐标为北纬30°27′09.5″,东经103°34′46.3″,海拔高度494.5米。本项目使用HDSY-G03无人机,索尼A5100相机为影像数据获取手段,影像数据采用VirtuoZo NT数字摄影测量平台进行处理。
3.1 飞行实验数据
无人机飞行情况:
1)像片航向重叠度为78%,旁向重叠度为50%,航带6条;
2)影像旋转偏角0-30;
3)摄影影像320张,格式为jpg;
4)飞行区域四周均匀布设平高点14个,平面控制点4个;
5)相对航高513米;
3.2 数据平差处理
通过一定的匹配算法在两幅或多幅图像中寻找同名点的过程,称为影像匹配,在影像自动匹配过程中,部分匹配的点位不是同名点,该点称为粗差点。一般的粗差点在光束法平差过程中,可逐渐缩小阈值范围来进行剔除;如果是特殊的粗差点,由于软件也无法识别,导致在光束法平差无法剔除,因此,该点只能通过人工识别的方法进行剔除。
3.2.1 普通粗差点处理方法
在光束平差中,将软件自动匹配的同名点进行自由平差,自由平差后得到每个像点在每张影像上两个方向(x、y方向)的残差值,将x、y的残差值作为阈值进行设定,残差大于阈值的进行删除,再次进行自由网平差和超阈值残差剔除,直到超阈值点全部剔除完毕,则粗差点处理过程结束。
根据国家对规范对阈值的规定,匹配点最大残差应小于4/3个像素,且中误差为2/3个像素,本次影像像素大小为3.9u,因此,本次匹配最大残差应小于5.2,且中误差小于2.6。为满足规范要求,本次无人机影像应剔除所有大于5.2的粗差点。为了避免粗差点剔除太多导致构网权重失衡和软件程序识别问题的出现,在剔除过程中,阈值的设定需要依据粗差点数与匹配点数构成的比例进行删除。光束平差剔除一般粗差点见表1
3.2.2 特殊粗差点的处理方法
在一般粗差点剔除后,所有粗差点阈值小于设定阈值,但还是会出现在匹配的连接点中,存在部分有问题的连接点,该类点称为特殊粗差点,特殊粗差点采用常规的匹配算法无法剔除,根据同名点都位于同名核线上的原理,该类点多数是同时位于多张相片中,在进行影像匹配时,由于点数量过多而软件解算得到的虚拟同名点,这些点在像方坐标系中的残差点太小,程序无法识无法采用阈值进行删除。此时可以通过引入地面控制点进行平差,再根据平差点与控制点误差进行比较来,以此来发现该类点并将其剔除,或者在地形相对平坦的区域采取过滤飞点的方法来找出特殊粗差点。

表1 光束平差剔除一般粗差点
3.3 绝对定向精度分析
在粗差基本剔除,且平差达到精度要求后,需要求解出各像片的外方位元素,并求出待定点的坐标值,最后得到空中三角测量加密数据。加密数据的精度评定,要从控制点的平面和高程残差中误差进行判断。本实验成果精度按1:1000摄影比例来确定。项目中采用野外采集的18个控制点来进行定向。均匀选取4个控制点、6个控制点和12个控制点分别进行平差,其结果和野外控制点进行较值分析,主要分析控制点的数量与成果精度之间存在的关系。航线及控制点布置图如图2所示,图中的圆点表示控制点,直线表示航线。
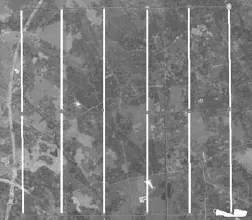
图2 航线及控制点布置图
以地面实际测量点为真测量值的前提下,平差计算的控制点与实际测量值进行对比,下面对设定控制点数目进行分析:
1)设定四个角上选取4个控制点为定向点,平差计算定向值和实测地面控制点值进行比较,两者较差和中误差见表2。
2)设定三条航线的起点和重点选取6个定向点,平差计算定向值和实测地面控制点值进行比较,两者较差和中误差见表3。
3)设定选取9个定向点,平差计算定向值和实测地面控制点值进行比较,两者较差和中误差见表4。从以上数据可以得出,当控制点为6个时,加密点的精度比4个控制点时显著提高,当控制点数量为9个时,精度与6个控制点时相当,因此,在合理布设控制点的情况下,光束法平差引入的控制点数目越多,其精度越高,但是其引入的控制点数目达到了一定饱和量,其精度提高变化也不明显,趋于精度极限。
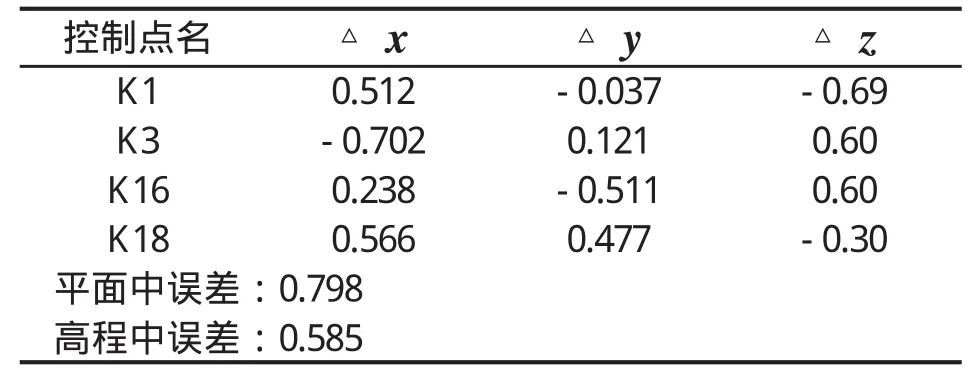
表2 4个控制点时实测值与平差值较值
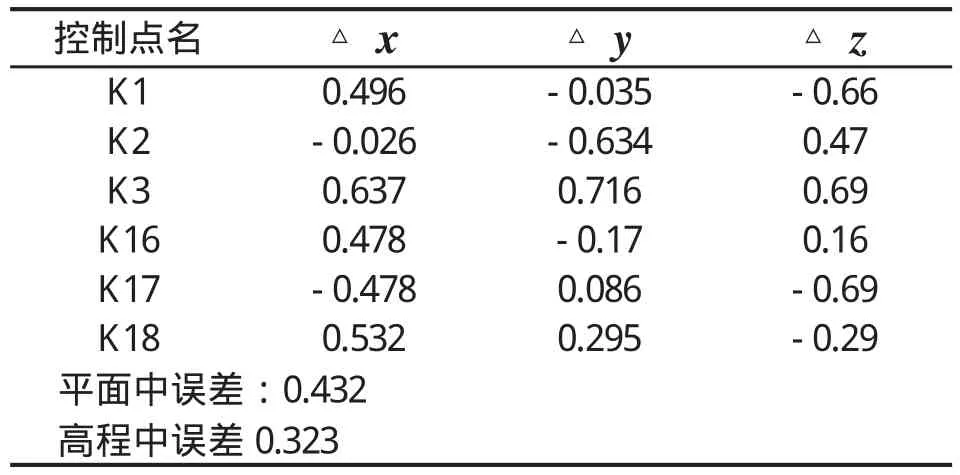
表3 6个控制点时实测值与平差值较值
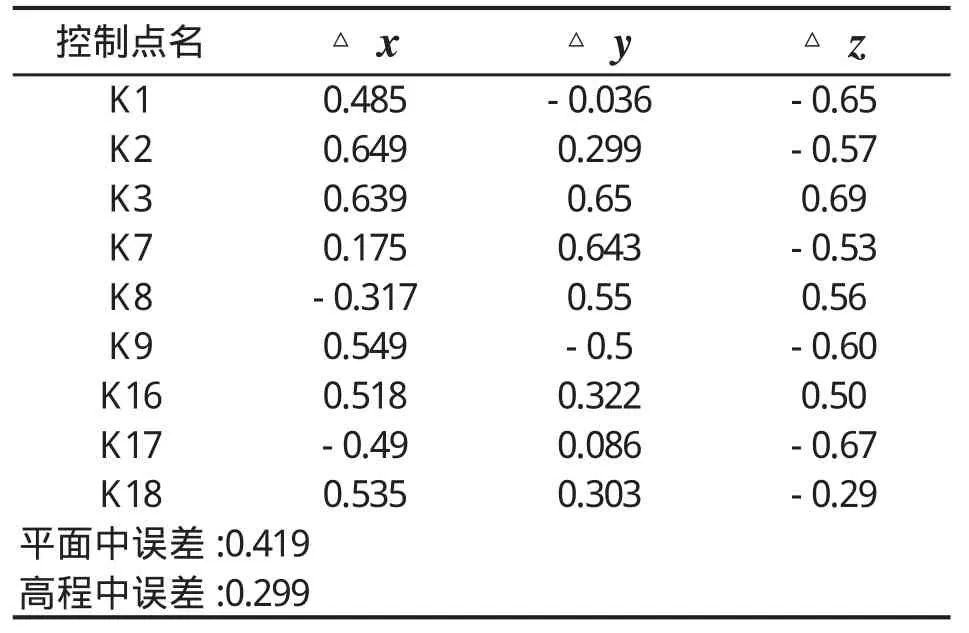
表4 9个控制点时实测值与平差值较值
4 结论
本文从光束法空中三角测量原理出发,分析了数据处理过程中粗差点的剔除方法,并在粗差剔除后的基础上,采用相同精度不同数量的控制点进行绝对定向,在不考虑外界其他因素对精度影响的情况下,加密点坐标精度随控制点的数量的增大而增大,但随着控制点到达饱和后,精度趋于稳定。
[1]袁修孝.GPS辅助空中三角测量的若干探讨[J].测绘学报,1997,(1):17-21.
[2]董秀军.三维空间影像技术在地质工程中的综合应用研究[D].成都理工大学,2015.
[3]陈姣.无人机航摄系统测绘大比例尺地形图应用研究[D].昆明理工大学,2013.
[4]史建青.机载LiDAR在省级基础测绘中若干关键技术研究[D].武汉大学,2014.
[5]陈涛.机载激光雷达技术在构造地貌定量化研究中的应用[D].中国地震局地质研究所,2014.
[6]郑强华.低空无人机空中三角测量精度分析[D].东华理工大学,2015.
[编校:杨 琴]
Data Processing and Precision Analysis of Aerial Triangulation by Beam Method
LUO Yong
(Changjiang Institute of Technology , Wuhan Hubei430212)
The accuracy of aerial triangulation is an important indicator of UAV in photogrammetriy proc ess, each link will affect the quality of photo processing in photography, and aerial triangulation methods is the important inf l uencing factors. There are three kinds of the aerial triangulation methods, among which bundle block adjustment is more rigorous, and is also widely used. This paper introduces the general and special gross error processing methods to solve bundle adjustment, and analyses the inf l uence of the number of control points on the accuracy of the results.
digital photogrammetry; bundle adjustment; precision analysis
P 231
A
1671-9654(2017)01-0069-03
10.13829/j.cnki.issn.1671-9654.2017.01.018
2017-01-20
罗勇(1982- ),男,江西九江人,讲师,工学硕士,研究方向为测绘技术教育教学。
猜你喜欢
儿童故事画报(2019年5期)2019-05-26
测控技术(2018年10期)2018-11-25
现代测绘(2018年3期)2018-09-13
中小企业管理与科技·下旬刊(2017年7期)2017-08-24
科学与财富(2017年19期)2017-07-19
长江工程职业技术学院学报(2017年2期)2017-06-19
科技资讯(2014年23期)2014-10-20
外语学刊(2011年3期)2011-01-22
漫画月刊·哈版(2009年9期)2009-11-25
漫画月刊·哈版(2009年12期)2009-03-26