力反馈技术及其在教育教学中的应用
2017-04-26 08:49刘路苗李伟戴佳佳
数字教育 2017年2期
刘路苗 李伟 戴佳佳
力反馈技术及其在教育教学中的应用
刘路苗 李伟 戴佳佳
(南京师范大学 教育科学学院,江苏 南京 210000)

力反馈技术的出现提供了一种新型的人机交互体验,它支持用户通过力反馈设备感受计算机虚拟环境中的物体运动和力觉信息,是一种新型的教育教学手段。本文在介绍力反馈技术的基本概念、工作原理及主流的力反馈设备以及总结力反馈技术关键问题的基础上,分析和归纳整理了力反馈技术被引入教育领域所取得的成果,得出力反馈技术在教育教学中的应用呈现教育教学层次多样化、教育教学领域多样化和教育教学方式多样化的特点。
力反馈;力反馈技术;力反馈设备;教育教学应用
虚拟现实技术是计算机图形学、人机接口技术、多媒体技术、网络技术、传感技术等的集合,是一门富有挑战性的交叉技术,被公认为21世纪影响人们生活的重要技术和发展学科。力反馈技术,作为一种重要的人机接口技术,它结合其他虚拟现实技术,使用户能够通过视觉、听觉和触觉等通道与虚拟环境进行交互,有助于用户对虚拟环境的熟悉和掌握。将力反馈技术引入到教育教学活动,用户一方面可以通过图形窗口观察教学情境,另一方面可以感受到在使用力反馈设备与教学情境中物体交互时产生的力反馈信息。力反馈技术和教学内容相结合,既可以活跃课堂的学习氛围,又可以激发学生的学习兴趣。此外,力反馈技术扩展了用户的人机交互方式,有助于用户手眼协调能力的提高,在教育领域应用前景广阔。经实践研
究和查阅文献资料,笔者了解到目前国内关于力反馈技术的研究和应用还处于起步阶段,本文对力反馈技术的概念、工作原理、主流设备及应用中的关键问题进行分析,对力反馈技术在教育教学领域中的应用进行分类整理,指出其应用特点和不足,以期对后来研究者起到参考和借鉴作用。
一、力反馈技术概述
(一)基本概念
力反馈是指在人机交互过程中,计算机对用户的输入做出响应,并通过力反馈设备作用于用户的过程[1]。它是一种机械装置表现出来的反作用力,将力反馈设备与环境中物体交互的信息转化成用户能够感知的力的效果[2],如触碰物体的阻力、举起物体的重力和“触摸”物体表面的摩擦力。基于力反馈的具体应用广泛存在:在击球训练的过程中,运动员在虚拟球场通过特殊的力反馈设备,身临其境地感受“击球”的力度和震感;在汉字书写训练中,用户借助力反馈设备训练书写过程中腕部和手指的运动控制能力和力度控制能力,并通过反复练习强化书写技能;在虚拟手术训练中,用户使用力触觉设备对虚拟的器官进行手术,根据人手感知到的反馈力控制手术刀的切口和力度,获得现场做手术时的逼真体验。相比单纯观看专家动作技能视频的教学方法,力反馈教学应用不仅提供了一种更具真实感和沉浸性的教学情境,而且其学练结合的模式有助于提高用户掌握动作技能的效率。
力反馈技术是一种新型的人机交互技术,它允许用户借助力反馈设备触碰、操纵计算机生成的虚拟环境中的物体,并感知物体的运动和相应的力反馈信息,实现人机力觉交互[3]。虽然传统的鼠标、键盘、触摸屏等交互手段可以满足用户与环境中物体交互的需求,但是缺乏力觉交互信息的反馈。力反馈技术结合其他的虚拟现实技术,使用户在交互过程中不仅能够通过视、听觉通道获取信息,还能够通过触觉通道感受模拟现实世界力觉交互的“触感”。因此,力反馈技术的引入,使交互体验更加自然、真实。
(二)工作原理
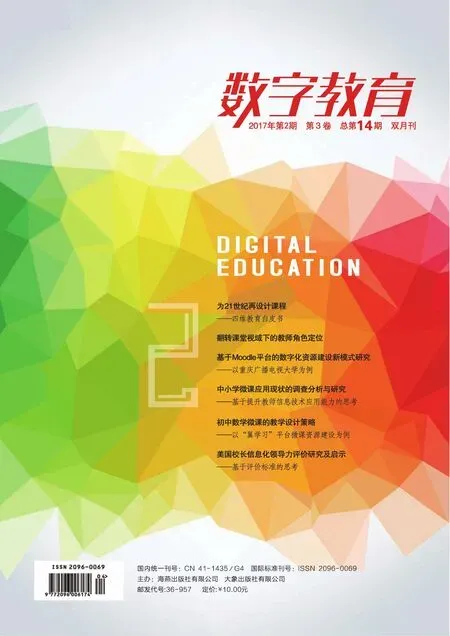
在力反馈系统中,用户一方面可以在图形窗口看到虚拟环境中的物体或场景,另一方面还可以借助力反馈设备身临其境地感受操纵物体时的力觉信息。力反馈系统的工作原理如图1所示。图中主计算机是整个系统的核心,用于执行程序的运算,处理外部设备输入,实现图形和力的同步实时渲染及力觉的输出;力反馈设备是力反馈技术的关键部分,允许用户操纵虚拟物体以及感受力觉信息;图像显示器,用于呈现渲染后的虚拟场景,通过可视化信息帮助用户设计、感知虚拟环境。力反馈系统的具体实现步骤如下:
第一,初始化。创建虚拟环境中物体的几何模型,依据其物理特征建立场景中物体柔软系数和作用力的映射关系;依据力反馈设备的运动空间与计算机中图形空间的映射关系,设置力反馈设备与虚拟物体的交互机制;初始化图形窗口和力反馈设备。
第二,信息计算。一方面,应用程序计算场景中的图形大小、位置和光照等视觉信息,另一方面,应用程序处理场景中物体的反馈力大小和物体材质等触觉信息。
第三,渲染和显示。依据计算好的图形信息,利用计算机在图形窗口中绘制相应的场景并将力觉信息输出到力反馈设备,同时用户感受到来自触觉设备的反馈力。
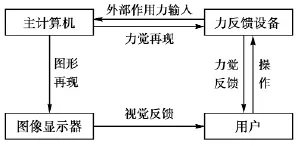
图1 力反馈技术工作原理
(三)主流的力反馈设备
在虚拟场景中,能够精确地反馈力/触觉信息的设备是至关重要的,它们是进行人机力觉交互的接口,它们可以实现识别用户的动作输入,并将计算机分析得出的反馈力作用于用户[4]。虽然力觉交互可以使用人体的许多部位来完成,但是目前只有基于手的力反馈设备较为发展成熟和广泛使用[5]。Geomagic、Force Dimension、Haption以及Immersion等公司[6]在该方面的研发上做出了贡献,图2展示了这类主流的力反馈设备。
美国Geomagic公司的Phantom系列是笔式的力反馈设备[如图2(a)(b)所示],在医学、艺术等领域已经得到广泛的使用;瑞士Force Dimension 公司的Omega系列和Delta系列是采用独特的Delta结构的力反馈设备[如图2(c)(d)所示],可在较大工作空间内实现作用力的大范围传递,主要应用于工业、医疗、航空航天、计算机模拟等环境要求苛刻的高端领域;法国Haption 公司的Virtouse 系列是可进行自行管理的力反馈设备[如图2(e)所示],具有活动范围广、可承受的力和扭矩大等优点,多应用于工业装配、航空维修和生物工程领域;Logitech公司的Force 3D和Microsoft公司的Sidewinder是游戏杆式的力反馈设备[如图2(f)(g)所示],在游戏领域使用较广;不同于上述桌面固定式的力反馈设备,美国Immersion 公司的Cyber Grasp 是一种装配在操作者身体上的手套式力反馈设备[如图2(h)所示],它可以同时为手和手指提供力反馈,适用于虚拟现实研究、产品设计、动画、教育等领域。
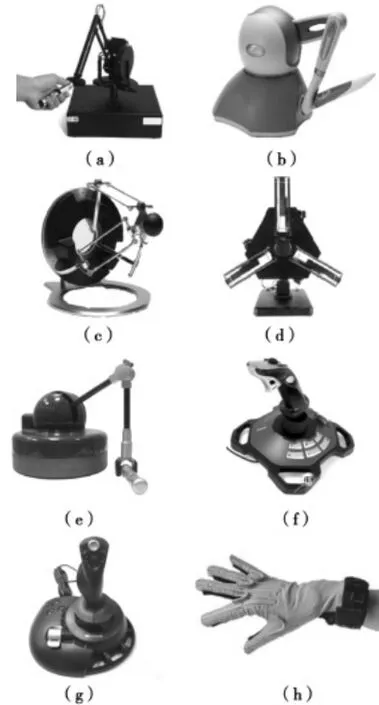
图2 主流的力反馈设备
(四)关键问题
力反馈系统的实现过程中涉及到以下关键问题:力反馈计算模型设计、碰撞检测、视觉与力觉的同步渲染,相应地产生了针对解决上述问题的一系列算法和接口。
1.设计力反馈计算模型
力反馈计算模型用于计算虚拟环境中物体间交互时产生的力,并由力反馈设备传递给用户[7]。目前,力反馈算法主要采用基于物理建模方法的有限元模型和弹簧—质点模型[8],如图3所示。其中,有限元模型将连续体离散为多个单元,分别对每个单元进行模拟,之后连接各单元模拟整个连续体,最后通过解方程组计算质点的受力;弹簧—质点模型首先将物体质量离散到各个质点,并通过弹簧连接柔性物体离散后的质点,依据胡克定律计算质点之间的力,从而模拟整个物体的受力。有限元模型能够较好地满足交互的真实性需求,但是运算量大、求解过程复杂,难以满足交互的实时性需求;而弹簧—质点模型具有建模过程简单、计算量较小、交互实时性较好的特点。
图3 有限元模型和弹簧—质点模型
2.实现碰撞检测
碰撞检测用于实时检测虚拟环境中物体间的碰撞情况,为之后图形信息的绘制及力反馈信息的计算奠定基础。当前的碰撞检测算法主要采用包围盒技术[9],首先对物体的包围盒进行相交检测(模糊碰撞检测),当包围盒相交时其包围的物体才有可能相交。然后进行物体间的精细碰撞检测,当包围盒不相交时,其包围的物体一定不相交,结束物体间的碰撞检测[10]。该方法可以避免大量不必要的相交测试,其碰撞检测过程如图4所示。
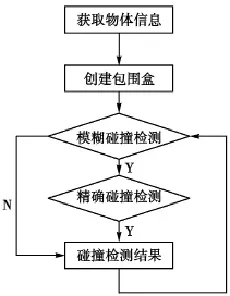
图4 碰撞检测流程图
3.增强力觉真实感
视觉与力觉的同步渲染用于保持较低刷新频率的视觉信息(30fps~60fps)和较高刷新频率的力觉信息(1000fps)的一致性。目前,主流的开源力反馈接口OpenHaptics、CHAI3D等都支持视觉与力觉融合的应用开发。其中,OpenHaptics是SenseAble公司针对Phantom系列力反馈设备研发的开发工具包,包括QuickHaptics API、Haptic Device API、Haptic Library API三个不同层次的接口库,能够满足不同用户的设计需求[11];CHAI3D是由斯坦福大学人工智能实验室研发的支持多种力反馈设备的开发工具包,它具有较好的可扩展性,允许用户在已有视觉、力觉渲染算法的基础上根据自己的需要设计新的渲染算法,也可以通过添加驱动的方法支持新的力反馈设备[12]。
四、力反馈技术在教育教学中的应用
力反馈技术最早应用于军事领域,主要用于飞行员、宇航员的模拟训练。随着计算机技术的发展,游戏厂商开始将这一技术引入电子游戏,普通的PC用户也能获得力反馈体验带来的乐趣。当前的教育活动主要通过文字、图形图像、声音、视频等给予学习者视、听觉信息,忽视了触觉信息对于培养学习者认知思维的重要性。随着力反馈技术的发展,将力觉交互引入教育应用成为可能。力觉信息和视觉、听觉信息相融合,进一步扩大了力反馈技术在教育中的应用。随着研究的深入,支持力反馈的教育应用分布呈现出教育教学层次多样化、教育教学领域多样化和教育教学方式多样化的特点。
(一)教育教学层次多样化
1.基础教育
在学习科学、技术、工程和数学(STEM:Science,Technology,Engineering & Math)课程时,用户常常会遇到一些复杂抽象的内容。研究表明,针对这些内容的学习,采用从具体到抽象的教学策略,有助于提高用户的学习效率。在教学过程中,师生先通过一定的教具以实践操作的形式进行具体事物的学习,再从符号、公式等抽象层次加深知识的理解。针对K-12数学教学,拉维克兰(Ravikiran) 等人[13]开发了支持力反馈的教具,并将它们应用于负数加法这一抽象概念的学习。负数加法教学过程中涉及的教具有:若干表面标有数字的小球作为加数(每个小球被赋予不同的力,力的大小与小球上数字的绝对值大小成正比,当小球上数字为正数时力的方向向下,负数时力的方向向上),一个加法容器(可放置一个或两个加数)。用户在进行加法操作时,首先借助力反馈设备移动加数到加法容器,操作完成后可明显感受到加法运算前后容器力的变化,即当向加法容器内加入一个正数时,加法容器向上的力相应增加;当向加法容器内加入一个负数时,加法容器向下的力随之增加。用户根据加法容器内力的大小和方向的变化情况,可以深入浅出地理解正负数对于相加运算后的和的影响。
2.高等教育
美国斯坦福大学和约翰霍普金斯大学[14]将力反馈技术融入大学生初级动力系统课程,并取得了良好的教学效果。该课程的学习内容分为以下三个方面:①力反馈系统的构建:首先,学生们要熟悉力反馈设备的操作方法和工作原理,并建立力反馈系统模型;其次,依据牛顿定律或其他类似的方法设计力反馈设备位置的运动控制方程,包括惯性、阻尼、摩擦力等参数的设定;最后,假设力反馈设备的运动是线性运动,校准力反馈设备的运动力矩输出和位置传感器。②系统响应和反馈控制的设计:学生们通过分析运动控制方程确定系统的极值,之后再通过一个放大回路连接计算机与力反馈设备。此外也可以借助控制软件调节控制增益和反馈增益确保系统交互的稳定性。③力反馈设备与虚拟环境的交互:学生们通过调整弹性系数和阻尼系数的大小,能够使力反馈设备模拟弹簧和阻尼器,同时明显地感知不同效果的摩擦力和阻尼力。此外,上述两所大学中的约翰霍普金斯大学开设了用于远程操作和虚拟现实的力反馈系统研究生跨学科课程,该课程采用学生分组的形式进行教学活动。小组成员来自不同专业,包括生物医学工程、计算机科学、电子工程和机械工程。该课程设立的初衷是鼓励来自不同专业背景的学生通过团队协作发挥各自的专长,如生物医学工程专业的学生能够具备人类心理物理研究所需的专业医学背景知识并且能够为外科手术仿真提供组织模型,计算机科学专业的学生可重点负责实施编程和力反馈渲染,其他专业的学生则完成力反馈机制的设计和实现。该课程的教学成果显著,课程开展的三年内有大约一半的课程项目论文被相关会议录用。此外,该课程的部分学生还参加了2006年巴黎支持力觉交互的机器人科学暑校活动,并展示了力反馈系统的基本设计实现过程。
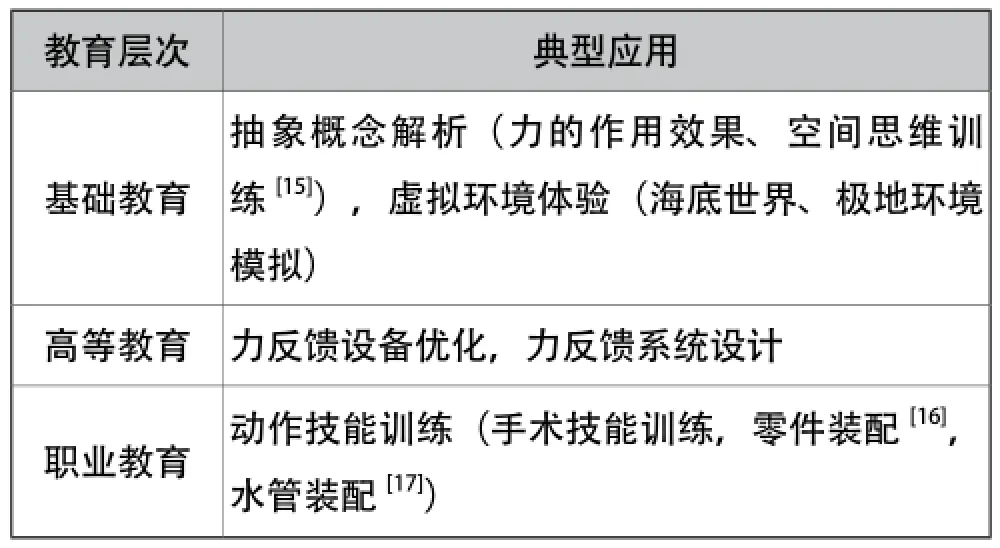
表1 力反馈技术在不同教育层次中的应用
(二)教育教学领域多样化
1.医学领域
“望、闻、问、切”四诊法是中医的精髓,其中“切”初指把脉,现在可泛指触诊。触诊是指医生通过手指触、摸、按、压被检查局部,以了解体表(皮肤及皮下组织等)及脏器(心、肺、肝、脾、肾等)的物理特征:大小、轮廓、硬度、触痛、移动度及液动感等。它可为医生检查部位及脏器是否发生病变提供重要依据,此外其诊断结果的准确性直接取决于医生手法的熟练程度。塞巴斯蒂安(Sebastia)等人[18]设计实现的触诊教学系统,不仅提供了逼真的生物软组织模型,而且优化了力反馈计算模型和力反馈设备的操作方式。用户在练习触诊手法时,一方面能够在显示器上看到自己的触诊动作,另一方面能够借助力反馈设备感受按压不同检查部位时力度的变化。该系统是一个可供用户双手操作的触诊教学系统,其仿真效果获得了触诊专家的认可。
2.生物学领域
“分子对接”是分子生命科学教育的核心概念,同时也是用户在学习过程中备感困惑的抽象概念。分子对接是一种将受体和配体分子通过空间匹配和能量匹配而相互识别形成分子复合物,并预测复合物结构的药物设计方法。康拉德(Konrad)等人[19]借助力反馈技术构建了分子对接模型,使用户能够通过操纵力反馈设备改变分子的位置和方向来寻找理想的对接位置,同时感知分子对接过程中作用力的变化,从而生动、直观地理解分子对接这一抽象概念。文章中设立两个实验组:视触觉学习组和仅视觉学习组,实验前后分别对实验组成员进行分子对接掌握程度测试。文章作者通过对比分析测试结果发现:学习结束后的测试中,视触觉学习组的测试时间少于仅视觉组,但测试准确率高于仅视觉组。
3.艺术领域
中国有句成语“字如其人”,它在一定程度上反映了一手好书法的重要性。在书法练习过程中,用户的笔画顺序和书写力度都会对书写效果产生影响。较之于以前的硬卡片书写练习,穆罕默德(Mohamad)[20]的基于力反馈的书法练习系统不仅能使用户模拟正确的书写轨迹,还能使用户在练习过程中及时纠正书写错误,例如用户在书写过程中过于偏离预定的轨迹,力反馈设备向用户施加相应的力引导至预定轨迹。该系统提供了三种学习模式,每种模式下提供不同的力反馈信息,能够满足不同用户的书法练习需求。
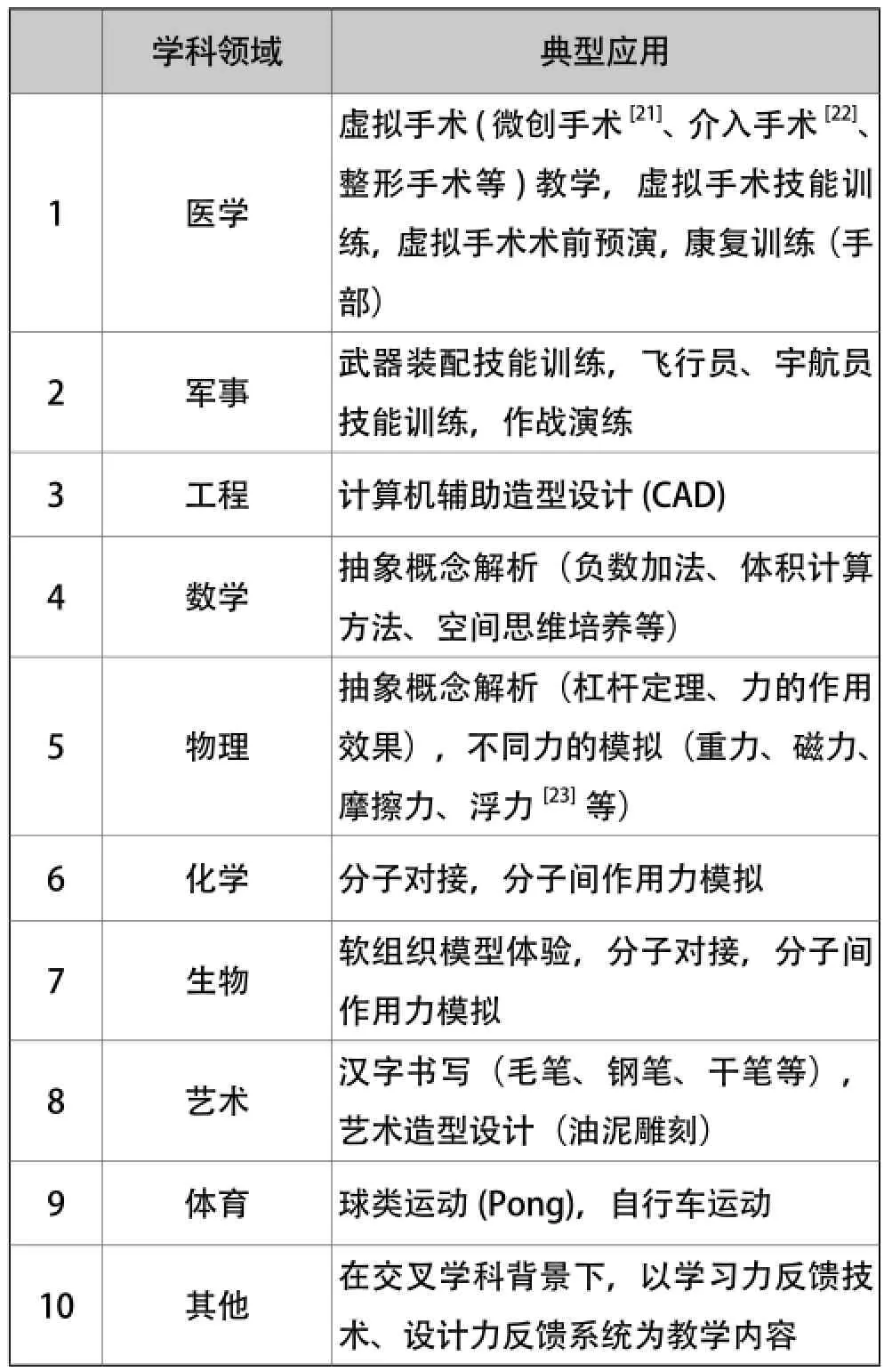
表2 力反馈技术在不同学科领域中的应用
(三)教育教学方式多样化
1.教学实验
针对齿轮工作原理的教学,Insook(因斯奥克)等人[24]以互相啮合的两个齿轮为例,设计实现了一个视觉、力觉融合的教学实验。实验过程中,用户借助力反馈设备转动其中一个齿轮并带动另一齿轮,这时就能感受到两个齿轮间的咬合力。实验结果表明,用户通过对引入力反馈的齿轮啮合仿真实验的学习能够加深齿轮工作原理的理解。闫峰新等人[25]构建了一个集物理、数学、生物、化学现象和仿真为一体的教学内容丰富的实验平台,此外该平台还提供了一系列实验工具用以辅助用户的学习活动。文中详细介绍了向心力的仿真实验以帮助用户理解质量、距离和速度对向心力大小的影响。实验中用户能够控制物体的质量、绕行速度、与另一物体的距离,并借助力反馈设备感受向心力的变化。
2.教育游戏
Pong 是一款古老经典且颇受玩家喜爱的弹球游戏,玩家需要在游戏中控制球拍将球击打出去,并在回接球时尽量不让球漏空。有相关研究团队[26]将力反馈技术引入到传统的Pong 游戏,使用户不仅能够借助力反馈设备控制球拍将球击打回去,还能体验挥动球拍击球时产生的力感和震感,增加游戏的趣味性。赫伯特(Herbet)等人[27]设计实现了一款面向成人口腔卫生护理的系统,该系统致力于通过教授正确的刷牙方法达到有效保持口腔卫生的目的。在该系统中用户既可以看到虚拟场景中的口腔模型和牙刷模型(力反馈设备的图形显示),同时也可以感受到操纵力反馈设备刷牙过程中的力(包括大小和方向)。实验结果表明,该系统能有效提高用户掌握正确刷牙方法的效率。
3.展览体验
力反馈技术在教育领域的另一个重要应用,是公共场所如博物馆和展览馆等的虚拟场景再现。在日常的文物展览馆,为了保护文物的完整性,绝大多数展品都设有禁止触摸的标识,用户只能通过眼睛观察文物的特征。使用虚拟现实技术和数字技术再现这些文物,既能允许参观者触摸这些文物,又能够保证文物的安全。展馆首先对这些文物进行3D建模,其次在模型表面添加纹理、材质等信息,最后连接力反馈设备,设计实现力反馈设备与场景中物体的互动机制[28]。参观者只需借助力反馈设备,即可“触摸”到文物的纹理和材质信息[29]。此外,在诸如珊瑚礁、沙漠等特殊场景中加入力反馈技术,用户不仅可以身临其境地观察场景中的鱼、珊瑚、仙人掌等物体,而且可以使用力反馈设备在场景中进行自由探索,同时获得相应的触觉信息[30]。使用力反馈技术数字再现的特殊场景融合了视、听、触多种感官信息,因而更加真实、自然,有助于激发用户的探索热情和学习兴趣。
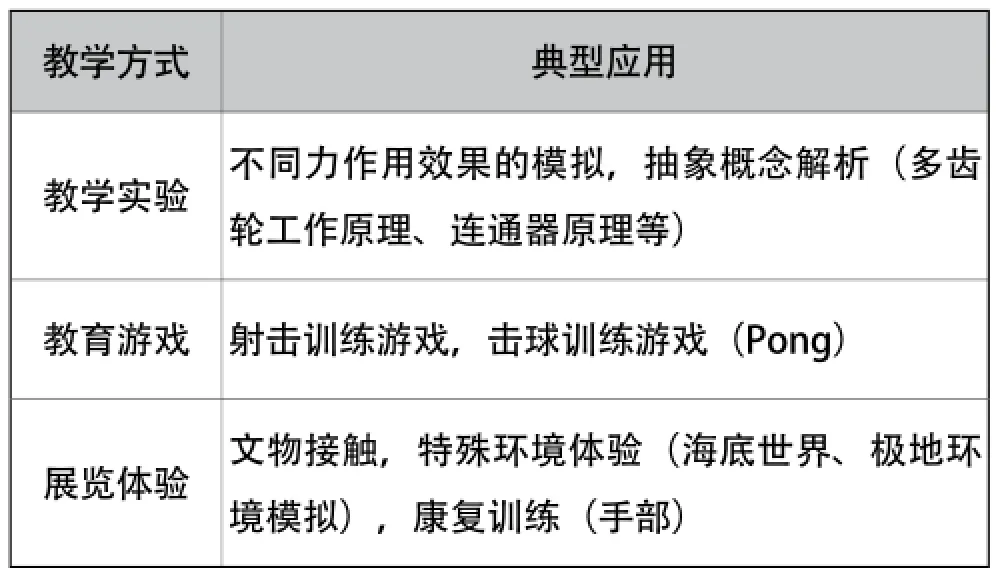
表3 力反馈技术教育应用形式
五、结语
作为虚拟现实技术的关键技术之一,力反馈技术实现了人机力觉交互,它结合其他虚拟现实技术提供了一种多感官通道融合的交互方式。与传统的以视听交互为主的教育应用相比,力反馈教育应用(其中包括力反馈技术以外的其他虚拟现实技术)不仅能为用户提供丰富的视听信息,同时允许用户通过操纵力反馈设备身临其境地感知虚拟环境中物体的运动和力觉信息。因此,将力反馈技术引入教育领域,能够增强学习活动的真实性和沉浸感。笔者通过查阅分析力反馈技术在教育中应用的相关文献,总结了不同教育层次、教学领域及教学方式下的主要应用,得到力反馈技术在教育中的应用具有教育教学层次多样化、教育教学领域多样化和教育教学方式多样化的特点。虽然与传统的教学系统相比,使用力反馈技术的教学系统,具有多感官融合、体验逼真、沉浸感强的优势,但是,力反馈技术在教育教学的应用过程中仍有一些问题亟需解决。第一,如何选择合适的教学内容:即如何依据既定的教学目标选择合适的教学内容,以充分发挥力觉交互在教学活动中的优势。第二,如何设计组织教学活动:由于教室空间有限和力反馈设备的成本问题,教学活动经常以分组形式进行,如何统筹小组合作和个人学习以确保教学目标的完成。第三,如何评价力反馈对学习效果的影响:教学活动中经常采用实验对比的方式判断力反馈是否影响最终的学习效果,但是还没有形成明确的评价标准,而且多数实验周期偏长(2—3个学期或学年)。由此可见,力反馈技术本身还不够成熟,力反馈教育应用尚处于初步发展阶段。然而作为一种重要的交互手段,它以其独特的优势指明了未来人机交互的发展方向,激发了广大教育工作者的探索热情和研究动力。相信在不久的将来,随着信息技术的发展和研究的深入, 力反馈技术将能够充分发挥其教育潜力,并且越来越多地应用于教育活动。
[1][3]杨立颖.基于力反馈的机器人遥操作系统研究[D].广州:华南理工大学,2011.
[2]一居.力反馈技术[J].个人电脑,2003,(8):174-175.
[4][7]陆九如,杭鲁滨,黄晓波,等.基于虚拟现实的力反馈交互系统应用技术[J].轻工机械,2016,34(2):98-102.
[5]陆熊,宋爱国.力/触觉再现设备的研究现状与应用[J].测控技术,2008,27(8):6-10.
[6]李佳佳,齐元胜,王晓华,等.基于虚拟现实的力反馈设备的研究与应用[J].机械科学与技术,2011,30(7):1107-1111.
[8]储丽丽.基于有限元分析和质点弹簧模型的软组织形变仿真研究[D].哈尔滨:哈尔滨工业大学,2014.
[9]马登武,叶文,李瑛.基于包围盒的碰撞检测算法综述[J].系统仿真学报,2006,18(4):1058-1061.
[10]陈学文,丑武胜,刘静华,等.基于包围盒的碰撞检测算法研究[J].计算机工程与应用,2005,41(5):46-50.
[11]SENSEABLE TECHNOLOGIES.3D Touch™ SDK OpenHap- tics™ Tookit Programer’s Guide(Version 3.0)[M/CD].Sense-Able Technologies,2008.
[12]CHAI3D.CHAI3D力反馈接口介绍[K/OL].(2013-08-18)[2017-01-10].http://www.chai3d.org/concept/about.
[13]SINGAPOGU R B,BURG T C.Haptic Virtual Manipulatives for Enhancing K-12 Special Education[C]//Southeast Regional Conference,Clemson,South Carolina,March 19-21,2009 New York:ASME,2009:1-4.
[14]GROW D,VERNER L N,OKAMURA A M.Educational Haptics[C].AAAI Spring Symposia-Robots and Robot Venues: Resources for AI Education,2007 San Francisco:AAAI,2007:53-58.
[15]COHEN C A,HEGARTY M.Inferring Cross Sections of 3D Objects:A New Spatial Thinking Test[J].Learning and Individual Differences(S1041-6080),2012,(22):868-874.
[16]Damian Grajewskia,Filip Górskia,Adam Hamrol,et al.Immersive and Haptic Educational Simulations of Assembly Workplace Conditions[J].Procedia Computer Science(S1877-0509),2015,(75):359-368.
[17]JAMES J,UNNIKRISHNAN R,DELMAR M.Haptic Sim- ulations for Training Plumbing Skills[C] IEEE International Symposium on Haptic,Audio and Visual Environments and Games,Richardson,TX,Oct 10-11,2014 New York:IEEE,2014.
[18]UllRICH S.Haptic Palpation for Medical Simulation in Virtual Environments[J].IEEE Transactions on Visualization and Computer Graphics(S1077-2026),2012,(18):617-624.
[19]KNORAD J,BIVALL P,TIBELL A E,et al.Exploring Relationships between Students’ Interaction and Learning with A Haptic Virtual Biomolecular Model[J].Computers & Education (S0360-1315),2011,5(7):2095-2105.
[20]EID M,MANSOUR M,LGLESIASR.A Haptic Multimedia Handwriting Learning System[C]//Proceedings of the Inter- national Workshop on Educational Multimedia and Multime- dia Education,Augsburg,Bavaria,Germany,September 28,2007 New York:ACM,2007:103-108.
[21]PINZON D,BYRNS S,ZHENG Bin.Prevailing Trends in Haptic Feedback Simulation for Minimally Invasive Surgery [J].Surgical Innovation(S1553-3506),2016,23(4):415-421.
[22]CHEN Guan-chun.Virtualreality Simulator System for Double Interventional Cardiac Catheterization Using Haptic Force Producer with Visual Feedback[J].Computers and Elec- trical Engineering(S0045-7906),2016,(53):230-243.
[23]MINOGUE J,BORLAND D.Investigating Students’ Ideas about Buoyancy and the Influence of Haptic Feedback[J].JSci Educ Technol(S1059-0145),2016,(25):187-202.
[24][29]HAN I,BLACK J B.Incorporating Haptic Feedback in Simulation for Learning Physics[J].Computers & Education (S0360-1315),2011,(6):2281-2290.
[25]YAN Feng-xin,HOU Zeng-xuan,ZHANG Ding-hua,et al. Research of Haptic Techniques for Computer-Based Educa-tion[C]//4thInternational Conference on Computer Science & Education,Nanjing,July 25-28,2009 New York:IEEE,2009:1636-1640.
[26]KESSLER J,LOVELACE R C,OKAMURA A M.A Haptic System for Educational Games:Design and Application-Specific Kinematic optimization[C]//Asme Dynamic Systems & Control Con-ference,Palo Alto,California,USA,October 21-23,2013 New York:ASME,2013,23(1):80-88.
[27]RODRIGUES H F,MACHADO L S,VALENCA A G. Applying Haptic Systems in Serious Games:A Game for Adult’s Oral Hygiene Education[J].SBC Journal on Interactive Systems(S2236-3297),2014,5(1):45.
[28]祁彬斌,陈彩华,庞明勇.Haptics 技术在教育教学中的应用研究[J].教育现代化,2015,(1):82-86.
[30]DARRAH M,MVRPHY K,SPERANSKY K,et al.Framework for K-12 Education Haptic Applications[C]// Haptics Symposium,Houston,TX,USA,February 23-26,2014 New York:IEEE,2014:409-414.
(责任编辑 孙志莉)
Haptic Technology and Its Application in Education and Teaching
LIU Lumiao,LI Wei,DAI Jiajia
(School of Education Science,Nanjing Normal University,Nanjing,Jiangsu,China 210000)
Haptic technology provides a new experience of human-machine interaction,which allows users to feel the motion and the force feedback information in the virtual environment through force feedback devices.It is a new means in education and teaching.In this paper we explained the basic concepts of the haptic technology and how it works,followed by a summary of main haptic devices and the key technologies included in haptic technology.We found that it features with diversified educational phases,educational areas and educational modes after our work on the analysis and summary of the application of the haptic technology in education and teaching.
force feedback;haptic technology;haptic device;education and teaching application
G4
A
2096-0069(2017)02-0034-08
2017-02-14
江苏省社会科学基金项目(15TQB005);江苏省现代教育技术研究2014年度课题(2014-R-33356);江苏省高校自然科学基金项目(11KJB520008)
刘路苗(1990— ),女,河南安阳人,南京师范大学教育技术系研究生,研究方向为数字几何处理;李伟(1990— ),男,山东泰安人,南京师范大学教育技术系研究生,研究方向为数字几何处理;戴佳佳(1993— ),女,安徽芜湖人,南京师范大学教育技术系研究生,研究方向为数字几何处理。
猜你喜欢
中学生数理化·高一版(2020年1期)2020-02-20
重型机械(2019年3期)2019-08-27
测控技术(2018年5期)2018-12-09
中学生数理化·八年级物理人教版(2018年10期)2018-12-06
电子制作(2018年9期)2018-08-04
商用汽车(2016年11期)2016-12-19
商用汽车(2016年6期)2016-06-29
浙江大学学报(工学版)(2016年9期)2016-06-05
商用汽车(2016年4期)2016-05-09
科普童话·百科探秘(2015年4期)2015-05-14