
基于自抗扰的三电机同步解耦控制系统
2017-05-02 07:35冯佩云冯俊青段小汇
微特电机 2017年5期
冯佩云,陈 冲,冯俊青,段小汇
(1.盐城工学院,盐城 224051;2江苏大学,镇江 212013)
0 引 言
在高性能的同步控制领域[1],为了达到最优的控制效果,必须使信号传输并处理及时,如果数据处理较慢,则在此情况下会使系统控制性能变差,而处理速度快的控制器价格很高,这就要求在合适的价位以及高性能的控制效果中权衡并选用合适的运动控制器。目前,我国运动控制器系列产品起步晚、发展相对较慢,所供应的产品大约有以下几种[2]:(1)用微处理器(MCU)作为控制器的“大脑”[3]。这种类型的控制器的控制精度不高,但控制器价格较便宜,所以适合于在一些低速控制领域或对运动控制精确性要求较低等场合使用;(2)将专用芯片设计为“指挥中心”。这类控制器结构简单、成本较低,是根据特定的控制要求来设计相应的控制方法,这一基本控制思想决定了它只能针对特定的系统实现特定的控制过程,限制了通过专用芯片设计的控制器使用广泛度,自适应性较差;(3)设计出用DSP并在外围扩展CPLD或FPGA的运动控制器[4-7],这种控制器利用了各个芯片的独特优势,采用开放式结构,便于开发人员二次开发等优点,在运动控制领域得到了很快的发展。本文选用第三种设计思路,设计了基于单片机、DSP和CPLD共同组成的三核控制器,完成了多电机同步协调控制,该控制器具有成本低廉,灵活方便,可靠性高等特点。
1 三电机同步系统的总体设计
1.1 三电机同步系统的控制方案
本文需要控制的参数是1个转速与2个张力,整个三电机系统是3输入3输出的被控系统,在控制过程中,先精确控制主电机的转速,在此基础上通过张力控制器1有效控制1,2号电机的张力值,以此来控制2号电机的转速,这就使2号电机跟随1号电机良好的运行,以此类推来控制最后一台电机的转速,使其跟随中间电机良好运行,从而达成整个被控目标同步协调运行。当选用经典PID控制方案时,调节过程完全依靠经验、调节时间长,增加了控制的复杂程度又达不到最优的控制效果,本文采用ADRC的控制方案[8],如图1所示。

图1 基于一阶ADRC的三电机同步控制策略
1.2 速度、张力自抗扰控制环的设计
本文主电机速度环选用的是一阶ADRC,将交流异步电机转动惯量变化和负载变化以及一系列不确定因素所引起的扰动均视为总扰动,用ESO观测后输入到控制器的前端实现补偿。TD,ESO,NLSEF和扰动补偿4个环节共同组成了ADRC[9]。由此推出一阶速度ADRC控制器的结构图,如图2所示。
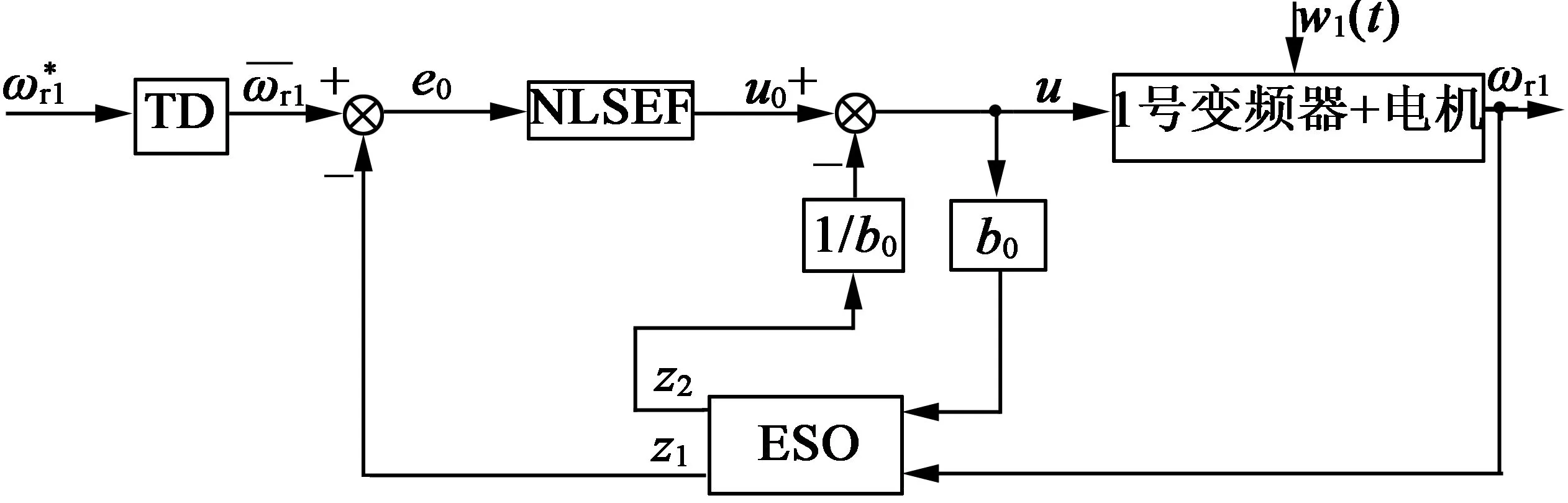
图2 一阶速度ADRC的结构图

2 系统的硬件平台
三电机同步控制系统主要由控制部分、驱动部分、反馈检测部分以及负载部分组成。
1)控制部分包括一台PC机和以单片机、DSP和CPLD为控制芯片所组成的三核控制器。控制器和工控机之间用RS-232通讯,用于实现对现场信号的检测以及上位机实时值显示和历史数据曲线的绘制,并对归档得到的数据进行逐个分析,以验证所设计控制器所表现出的各项性能情况,也可以用来作为配置控制器相关参数的依据。控制器中的CPLD与被控对象的3台变频器之间采用RS-485通讯,用于将控制器处理好的数据传输给变频器,进而再用变频器来控制电机,以实现3台电机的同步协调运行[10]。
文中所设计的三核控制器如图3所示。由图3可知,显示部分包括LCD彩屏显示和数码管显示,彩屏位于控制板上左上角,用以显示速度和张力的实时数值以及这3个参数历史数据的曲线绘制,并具有自动刷屏的功能;数码管位于右上方,用于控制过程中显示速度值和张力值。速度和张力的给定值可以在程序中直接给定,或者可以通过键盘设定张力和速度值,并经过74HC138编码后输入单片机处理。SN74LVC8T245芯片是用于将从单片机输出的5 V的信号转换为3.3 V信号输给CPLD进行2个张力的处理。

图3 控制器
2)驱动部分包括3台西门子MMV变频器和3台交流异步电机,3台变频器分别驱动3台电机。
3)反馈检测部分包括对速度的检测和对2个张力的检测。本文选用圆形的国产YGM-615编码器,实验中编码器输出的信号时常会带有毛刺,系统中毛刺的进入会影响每转脉冲数的计数值,所以在转速计算之前,必须在编码器输出信号后对其滤波,编码器输出线经330 Ω电阻降压为3.3 V,接到CPLD的96号引脚完成软件滤波。
张力传感器选用上海毅浦自动化设备有限公司生产的型号为YP-H2的传感器,将传感器测出的信号经过AD7705进行模数转换,得到相应的数字信号输入给单片机,再经过SN74LVC8T245芯片,将从单片机输出的5 V的信号转变为3.3 V信号输给CPLD进行2个张力的处理。
4)负载部分由3台电机轴分别与3台减速机和3台驱动滚筒同轴连接,3台驱动滚筒上分别安装了磁粉制动器,通过给磁粉制动器加激励电流来模拟实际工况下的负载。
三电机控制网络采用的是主-从站机制,其中,控制器是由MCU,DSP和CPLD的三核处理器组成,控制器和工控机作为系统主站,3台西门子MM440作为系统从站。系统整体网络结构,如图4所示。

图4 三电机系统整体网络结构图
3 系统的软件设计
本文设计了一个三核控制器,而这3个控制芯片分别是单片机、DSP和CPLD,利用3个处理芯片的各自优势,它们之间相互协调达成最终的控制任务。下面将针对这3个处理器所承担的任务,分别设计其相应的控制程序。
首先,单片机处理器选择的是STC89C52,主要完成2个张力采集时需要和前端模数转换芯片进行通信,在张力1采集完成后,需要对张力2进行采集,其过程类似于张力1。下面以张力1为例说明采集的详细过程:首先AD7705通信端口复位,并使A/D芯片第一个通道初始化,单片机的P3.5引脚通知模数转换芯片做好准备,等AD7705准备好后,向其通信寄存器写入一个命令,再从AD7705中读入一个字节的张力1转换后的数字量,将读入的数据放入寄存器中并还原成对应的电压值,再进行张力2的读入,至此,完成了张力的采集。
DSP作为主处理器处于系统的核心地位,在整个系统中主要作用有反馈信息的获取、控制信息的发送和PID或一阶ADRC算法的计算,实验中速度和张力数值的实时显示以及速度和张力曲线的绘制,整体的流程图如图5所示。
由图5可知,先进行系统配置寄存器的初始化及中断的初始化,所用中断引脚为XINT1,初始化通用I/O口,将I/O口配置为输入输出口。由于算法中用到的变量、数组等存储单元较多,编程时采用结构体形式存储数据,可以使程序阅读方便、结构清晰,同时在系统上电时要对自抗扰算法的相关数据进行初始化。速度信息采用1个字的信息来表示,2个张力也各是1个字,需要读取的参数信息一共6个字节。DSP数据接收口是8位并行数据线需要6次才能读完,每次中断读取1个字节。算法对反馈信息的处理程序都发生在中断子程序中,初始化完成后就进入了等待中断。当有中断来临读取并口数据线上的数据,接着判断电机停转标志位,该标志位由F12或F23大于900 N时引起,防止皮带过紧崩断,若是则在下次中断执行中发送电机停转指令,否则判断data_rx_over_flag是否等于“1”,该标志位置“1”代表CPLD发送过来的6个字节的反馈信息接收完毕,若是“0”则跳出中断,否则先将data_rx_over_flag清零,接着计算接收到的速度、张力数据的实际大小,以便为算法处理提供直观数据。若是电机的转速大于600 r/min则给定电机转速为600 r/min,目的是限制运行速度。计算过实际大小后,接着调用ADRC算法子程序返回调节后的控制量,返回的张力数据经过计算得到实际值。实验中获取的张力信号毛刺很多,滤除这些干扰采用一阶滞后滤波,滤波后判断张力是否过大,F12或F23超出900 N将电机停转标志位stop_flag置“1”,下次中断程序中发送停转指令,否则将获取的张力数据进行张力的ADRC计算,得到第二、三台电机的频率字。3台电机的频率控制字都得到后,统一通过SPI接口发送给CPLD进而发送给变频器。程序在执行完一个控制运算周期后,紧接着进入下次控制运算流程。

图5 DSP程序框图
CPLD主要实现对编码器输出信号的滤波处理、控制器和上位机的通信以及控制器输出信号与3个西门子变频器的通信。首先编码器采集主电机速度脉冲序列,在实际工况下,先对编码器代入的毛刺进行滤波,而单片机传输来的数据则需要经过分拣,编码器信号和张力信号都要经过合并,也就是将16位的数据寄存器存储值合并成32位数据进行并行传输,数据一方面将传输到232模块发送到上位机;另外将传输到数码管用于张力和速度的显示。数据还需要传输给DSP用于算法的处理,这里CPLD给DSP发出中断信号,然后进行相关算法的运算。
4 验 证
为了测试所设计三电机系统同步控制效果,进行基于ADRC算法与PID控制算法下抗负载扰动实验。在负载实验中,通过观察负载改变时,系统中主电机转速与2个皮带张力的变化情况。在系统中,设定主电机转速ωr1给定为300 r/min,张力F12给定为96 N,张力F23给定为72 N,不加负载的情况下使电机空载起动,在80 s的时刻,加载1.3 A的电流给主电机的磁粉制动器,得到使用PID控制器的各参数曲线,如图6所示。使用ADRC控制器的各参数曲线如图7所示。

图6 PID控制

图7 ADRC控制
由图6、图7可知,突然增加负载时,当系统选用PID方案时,则超调为-15.6%,调节时间为7.3 s;当系统选用ADRC方案时,则超调为-6.7%,调节时间为0.73 s。由此可知,采用ADRC控制器时,超调量减少而且调节时间也大大缩短,且在突加负载时,张力F12有负超调,随后带来了系统的振荡。从而得出采用ADRC方案的抗负载扰动能力优于PID。
[1] 张今朝,刘国海,潘天红.多电机变频调速同步系统的多模型预测控制[J].控制与决策,2009,24(10):1489-1494.
[2] 於新华.基于DSP+FPGA的多电机同步控制系统研究[D]:北京印刷学院,2011.
[3] 杨士河,刘景林等,基于DSP的多电机协同控制系统设计[J],测控技术,2010,29(6):45-47.
[4] 于凯平,郭宏,吴海洋.采用DSP 和FPGA 多电机速度伺服驱动控制平台[J],电机与控制学报,2011,15(9):39-43.
[5] 聂宜云,孟凡军,颜肖平.基于DSP_FPGA架构的嵌入式运动控制平台设计[J],测控技术,2015,34(5):69-71.
[6] 施文美.基于DSP_CPLD控制结构的矿用蓄电池机车设计[J].仪表技术,2016(8):18-22.
[7] 刘建国.基于DSP+CPLD的全数字脉冲MIG焊机的研制[D].广州:华南理工大学,2014.
[8] 韩京清.自抗扰控制器及其应用[J].控制与决策,1998,13(1):19-23.
[9] 韩京清.自抗扰控制技术:估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008:342-598.
[10] 王宏波.多电机驱动的带式输送机的传动控制[J].煤矿现代化,2009(5):60-61.
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
少儿科技(2022年4期)2022-04-14
马克思主义哲学研究(2021年2期)2021-06-05
新世纪智能(高一语文)(2020年9期)2021-01-04
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
中华诗词(2018年4期)2018-08-17
制造技术与机床(2017年7期)2018-01-19
