
一种大幅宽空间光学遥感器调焦控制系统设计
2017-05-09 17:58郑君张孝弘雷文平李坤张占东齐少凡李富强
航天器工程 2017年2期
郑君 张孝弘 雷文平 李坤 张占东 齐少凡 李富强
(北京空间机电研究所,北京 100094)
一种大幅宽空间光学遥感器调焦控制系统设计
郑君 张孝弘 雷文平 李坤 张占东 齐少凡 李富强
(北京空间机电研究所,北京 100094)
传统调焦控制系统的驱动力和体积大小,已无法满足大幅宽空间光学遥感器大焦面调焦的需求,为此,文章提出了一种双路直线驱动调焦控制系统设计。调焦控制系统通过焦面位置遥测单元的精确测量和焦面调焦控制单元的自主决策原则,运用分步调焦、实时监控、实时调整的闭环反馈控制方法,实现高精度、高可靠性的大焦面调焦控制。该系统设计具有调焦驱动力大、调焦精度高、调焦机构设计简单和调焦可靠性高等特点。调焦性能测试和外景成像试验,验证了系统设计的可行性。该设计可用于大幅宽空间光学遥感器的调焦控制,从而保证光学遥感器调制传递函数(MTF)及成像质量。
空间光学遥感器;调焦控制系统;闭环控制;编码器
1 引言
为了保证大幅宽空间光学遥感器的成像质量和几何精度,设计一套高精度、高稳定性的调焦控制系统是十分必要的。这是因为:①由于大幅宽空间光学遥感器的光学系统焦距较长,卫星发射过程中的振动、冲击,以及复杂多变的在轨温度、压力等环境,可能会导致成像系统偏离焦平面[1-3]。离焦是影响成像质量的重要因素,将导致光学遥感器调制传递函数(MTF)下降,从而降低成像分辨率,直接影响几何精度[4]。②在轨的最佳焦面位置与在地面常温常压实验室状态下的焦面位置,以及真空常温条件下的焦面位置,可能都会存在差异,必要时要进行在轨调焦[4]。③地球本身的椭圆特征、地表景物绝对高度的参差不齐,以及光学遥感器的变轨成像功能,也要求具备在轨实时调焦能力[2]。中巴地球资源卫星-02B(CBERS-02B)在轨测试期间,进行了在轨调焦,取得了明显效果[4]。美国艾科诺斯-2(IKNOS-2)卫星在轨也经历了多次调焦过程。世界观测-1(Worldview-1)卫星和地球之眼-1(GeoEye-1)卫星经在轨测试调整,确定了光学遥感器的最佳焦面位置[5]。
文献[1,3]中阐述了遥感器中一般常用的凸轮调焦机构、丝杠螺母调焦(螺纹调焦)机构和连杆调焦机构的调焦设计方案,但是这3种方式对于结构布局非常紧凑的大焦面来说,存在一定的局限性,占有较大的空间。本文以确保遥感器成像质量为出发点,提出了一种双路直线驱动高精度调焦控制系统设计,采用软硬件结合设计的闭环控制方法,调焦驱动力大,可靠性高,在确保光学遥感器的光学高稳定性基础上,实现高精度调焦。
2 调焦控制系统设计
2.1 总体设计
光学系统不同,应用领域不同,调焦方式也不同。光学遥感器常用的调焦方式有镜头调焦、反射镜调焦和焦面调焦3种[1]。镜头调焦通过移动光学镜头的方式改变光学间隔实现调焦,反射式光学系统中,主镜和次镜对成像质量影响较大,一般不作为调焦对象,而常采用三镜调焦方式[3]。高分二号(GF-2)卫星的高分辨率光学遥感器就采用三镜调焦方式进行调焦设计[6]。反射镜调焦通过移动在光学系统中起折转光路作用的反射镜进行调焦,常用于后截距较长、调焦精度较高的光学系统中。资源三号(ZY-3)卫星多光谱相机通过调整平面镜位置可实现焦面位置的调整[7]。焦面调焦的优点是能让光学系统保持很好的稳定性,适用于对光学系统非常敏感、稳定性要求高的光学遥感器。
对于大幅宽的光学遥感器,调整大尺寸的三镜或反射镜位置对成像质量非常敏感,其微小的角度变化都会使CCD光敏面偏离光学系统的焦平面,将直接导致MTF下降,其函数表达式为[8]
(1)
式中:M为离焦的MTF值;J1为一阶贝塞尔函数;S为轴向离焦量;NA=D/(2f)=1/(2F),其中,D/f=1/F,D为入射光瞳直径,f为光学系统的焦距,F为相对孔径的倒数。
式(1)显示了遥感器离焦直接影响MTF的大小。因此,在调焦控制系统设计中,本文采用焦面部件移动方式,有利于保证光学遥感器自身成像性能和几何精度的稳定性。但是,大幅宽势必导致焦面结构长度跨度大,焦面结构和电路设计规模大,质量大;同时,长焦面结构中间空间狭小,可利用空间不足。因此,采用焦面调焦需要解决的关键问题是:①要满足大驱动力的需求;②调焦机构占用空间小。为此,本文提出焦面两端采用双路直线驱动+闭环反馈控制的大焦面调焦控制系统设计。如图1所示,调焦控制系统包括电机1和2的驱动单元、焦面位置1和2的遥测单元、焦面调焦控制单元。电机1和2的驱动单元由2个相同的直线步进电机组成,分别安装在焦面两端。电机内部直接实现旋转运动到直线运动的转化,体积小,性能好,特别适用于在极其有限的空间内实现高性能和长久应用的场合。焦面调焦控制单元根据地面注入的调焦控制需求,依据自主决策原则产生相应直线步进电机的驱动脉冲信号,同时根据焦面位置遥测单元的遥测信号,实行闭环控制,完成焦面位置快速、准确的调整。
调焦分辨率是指焦面能移动的最小值,指电机每运行一个步距角所对应的焦面移动量,一般应小于光学遥感器半焦深的1/5[9],焦深|±Δ|根据式(2)求得。
(2)
式中:λ为光学遥感器工作的中心波长。
调焦控制系统设计的关键之处在于遥测和控制的准确性和可靠性。因此,要解决2个难题:①保证同步驱动一致性的问题;②保证系统高可靠性的问题。采用双路直线驱动存在焦面两端移动不同步、不一致的问题,从而导致焦面倾斜的风险,影响成像质量。对应的解决方案是采用闭环反馈控制。调焦控制系统实时读取2套焦面位置遥测单元的遥测信号来确定焦面两端的实际位置,同时通过实时比对遥测结果来判断2个电机的同步性,并修正驱动脉冲,满足焦面两端位置一致。为保证系统的高可靠性,电路系统中都采用成熟的功能模块化设计,针对关键的电路功能模块之间的接口,须加强硬件接口电路可靠性设计。

注:ASI为异步串行接口。图1 调焦控制系统设计方案Fig.1 Project design of focusing control system
2.2 焦面位置遥测单元设计
焦面位置遥测单元的作用是实现调焦过程中焦面位置的精确测量。一般,采用电位计测量焦面移动位置是最简单的遥测方法,但是,无论是普通机电式电位计,还是数字电位计,都有测试精度不高、测量范围小的局限性。为此,本文焦面位置遥测单元采用多圈绝对值式光电旋转编码器测量系统,包括:编码器光电转换系统和编码器信号处理系统。编码器测量角度精度高,16位的编码器分辨率达到0.005°,且测量范围宽,能记录旋转的圈数。如图2所示,编码器光电转换系统安装在直线电机的后部,为电机旋转轴的每一个位置提供唯一的编码数值,实时将角度信息转换成模拟信号,送入编码器信号处理系统,得到多圈绝对值式的角度值[10-11]。焦面调焦控制单元将电机旋转的角度值换算成轴向的直线距离,就可实现焦面位置的精确测量。
焦面位置遥测单元关键接口电路有两处:①编码器光电转换系统输出接口。编码器光电转换系统向编码器信号处理系统输出的模拟信号接口采用交叉主备份设计方案,既有光电转换系统的主备份电路设计,又有输出接口的主备份设计,具有高可靠性特点。②编码器信号处理系统输出接口。相对一般通用的数据传输方式(并行传输和同步串行传输),本文采用的编码器信号处理系统数据输出方式为ASI传输方式,在约定的波特率下,遥测数据由编码器信号处理系统传向焦面调焦控制单元。为保证可靠传输数据,编码器信号处理系统和焦面调焦控制单元之间的硬件接口电路也采用交叉主备份设计方案。

图2 焦面位置遥测单元原理示意Fig.2 Schematic diagram of focal plane position telemetry unit
2.3 焦面调焦控制单元设计
2.3.1 硬件设计
焦面调焦控制单元(见图3)包括反馈控制模块、电机脉冲驱动模块和电源模块。反馈控制模块是调焦控制系统的控制核心,其基本功能是:接收光学遥感器控制平台的调焦控制需求(调焦距离+调焦方向);同时接收焦面位置遥测单元的遥测信号来确定焦面结构的实际位置,并经过实时处理产生双路直线电机的相应脉冲时序信号。电源模块主要是为整个焦面调焦控制单元提供电能。电机脉冲驱动模块是执行组件,根据反馈控制模块输入的步进电机脉冲控制信号,产生步进电机所需的驱动信号。
为确保焦面两端调焦的同步性、一致性,反馈控制模块要具备:①实现2个电机驱动脉冲的时序同步,即时序控制同源性;②能够实现任意一个电机的单独驱动调整工作;③实时比较2个电机的同步性,并修正驱动脉冲满足焦面两端位置同步。
(1)时序控制同源性的实现。如图3所示,反馈控制模块向电机脉冲驱动模块1和2同时输出电机同步脉冲时序信号,并保证信号传输路径的长度一致,这样可以满足时序控制的“同源性”。也就是说:①路径a与路径a′的长度之和应等于路径b与路径b′的长度之和;②电机脉冲驱动模块1和2同时工作。
(2)单电机驱动调整的实现。在实现时序控制同源性的情况下,若某个电机在前进或后退过程中遇到阻力,出现实际的直线运行距离与指令要求的脉冲信号不匹配,即出现“丢步”情况。这时能根据实际遥测位置值来进行相应电机的单独驱动调整。如图3所示,反馈控制模块输出使能信号1和使能信号2。在同源时序驱动工作模式时,两路使能信号同时为高电平,允许2个电机脉冲驱动模块同时工作。若判断出某个电机出现“丢步”情况,该电机脉冲驱动模块收到的使能信号为高电平,其模块处于工作状态,同时使另一个电机脉冲驱动模块收到的使能信号为低电平,使其模块处于待机状态,这样就可以满足单独调整某电机的前进或者后退。如表1所示,使能信号1与使能信号2的不同组合,能够实现调焦控制系统的4种工作模式。
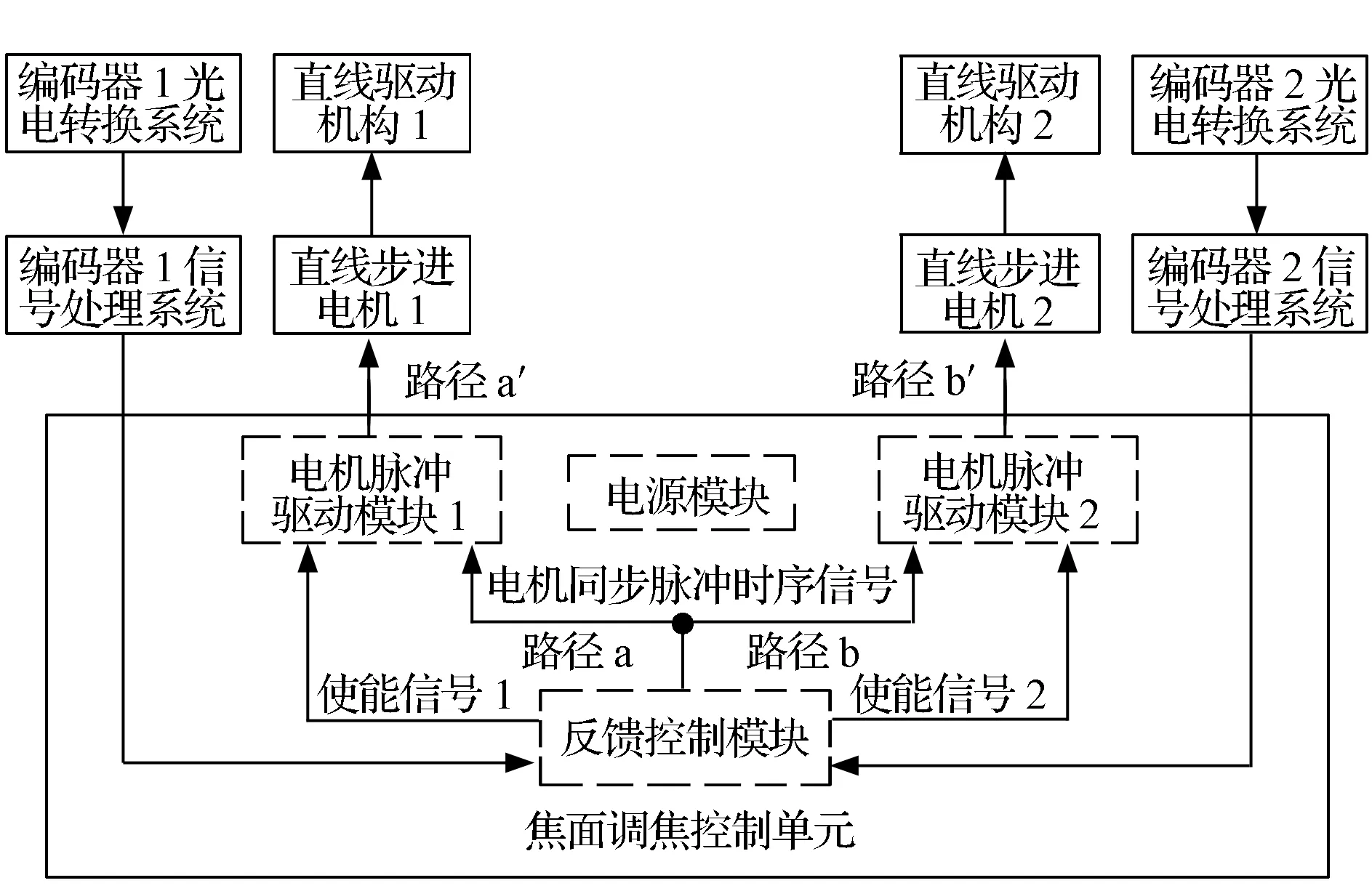
图3 焦面调焦控制单元结构Fig.3 Focusing control unit structure

使能信号1使能信号2电机脉冲驱动模块1电机脉冲驱动模块2工作模式说明高电平高电平工作状态工作状态同源时序模式高电平低电平工作状态待机状态电机1调整模式低电平高电平待机状态工作状态电机2调整模式低电平低电平待机状态待机状态待机模式
2.3.2 软件设计
调焦控制系统可实现分步调焦,实时监控,实时调整。硬件设计上实现了时序控制同源性和单电机驱动可调性,为软件的实施提供了保障。如图4所示,软件工作流程就是根据地面上注的调焦需求,依据自主判断原则确定调焦步长的策略。如果调焦步长D较大,则首先进行粗调,将大步调整化解成多个小步数dn调整,即D=d1+d2+d3+…+dn(n=1,2,3,…);进入精调范围时,按照最小步长dmin=1进行调整。无论是粗调还是精调,每次调焦都要进行距离比较。由于执行机构机械间隙的因素,两端的绝对位置不可能与理论计算结果完全相等。根据间隙误差分析得到的允许最大公差为
(3)
式中:L1和L2为编码器1和2的角度值;L0为焦面两端绝对位置相差所允许的最大值。
根据焦面移动距离比对结果作出实时调整,对移动位置小的一端进行单独修正,目的就是确保每走一步都能满足焦面两端的移动同步性,避免焦面结构倾斜,确保成像质量。

图4 调焦控制系统工作流程Fig.4 Working flow of focusing control system
3 试验验证与结果分析
试验验证包括实验室里的性能测试和实地外景成像测试。通过精确的数据测试和实物图像拍摄测试,能充分验证调焦控制系统的设计效果。
3.1 调焦控制系统性能测试验证
3.1.1 测试验证方案
根据式(2)求得本文验证用光学遥感器的焦深,调焦分辨率设计值应小于半焦深的1/5,设计数值应优于0.002 0 mm才能满足调焦精度要求。综合考虑机械加工误差、装配装调误差,以及在轨工作温度均衡变化等环境因素引起的遥感器光学系统变化,分析确定遥感器焦平面在光轴方向±2.00 mm的调焦行程可满足调焦范围要求。同时,根据光学系统仿真,焦面移动的角偏精度须优于10″的设计要求。为了充分验证上述性能指标,在洁净度10万级的实验室里进行直线度测试和精度测试。
直线度测试采用经纬仪测角法。如图5所示,在焦面机构中间粘贴了基准镜,测试时,经纬仪瞄准基准镜,将调焦机构由一个极限位置经中间位置移向另一个极限位置,分别记下经纬仪在各个位置的水平角和竖直角的读数,通过不同位置的角度来判断调焦过程中焦面机构运动的直线性。

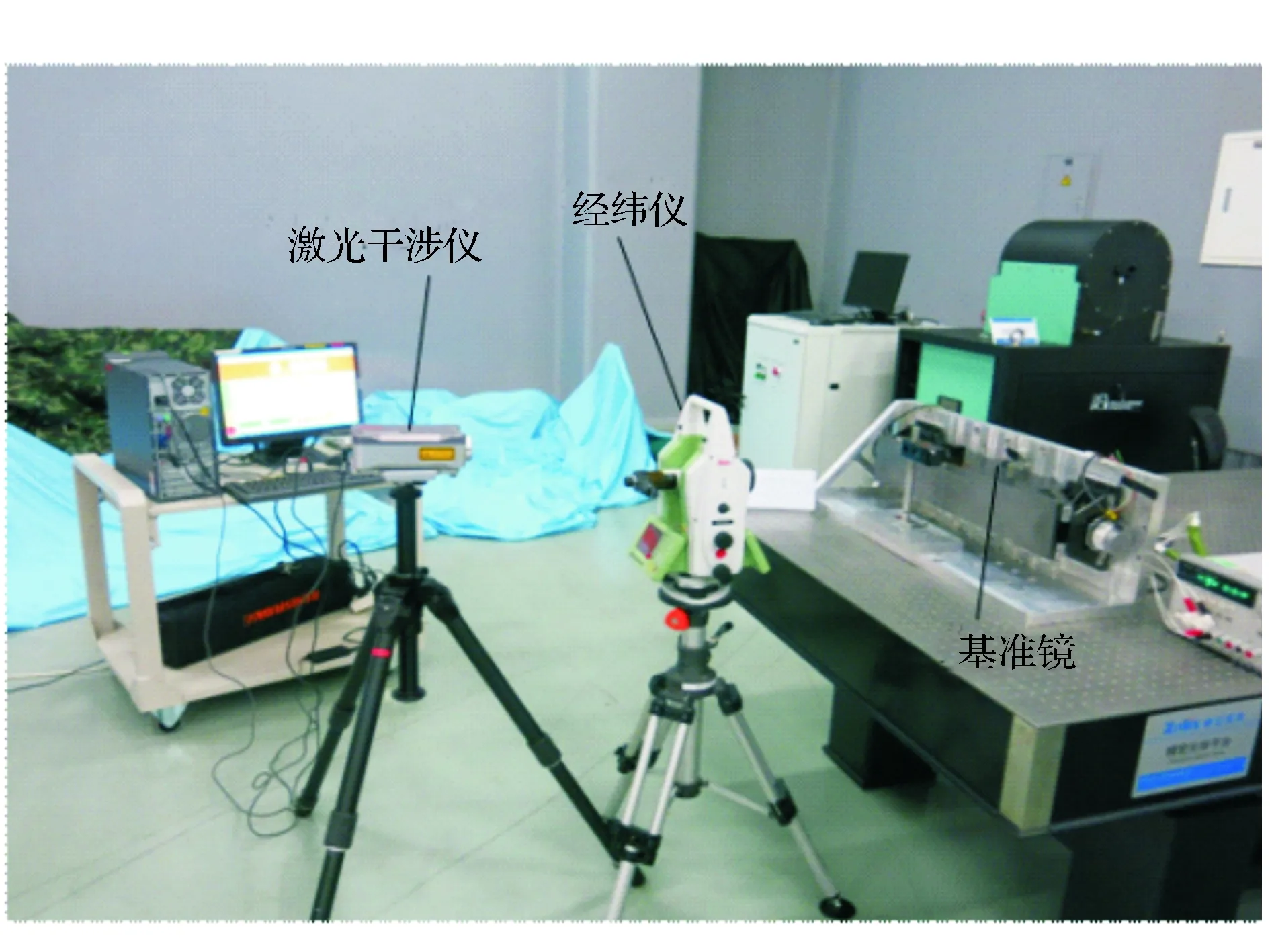
图5 调焦控制系统测试Fig.5 Test of focusing control system
3.1.2 测试验证结果与分析
调焦范围测试结果见表2,直线性测试结果见表3,调焦精度测试结果见表4,残差Si统计曲线见图6。分析可得:
(1)实际测试范围为±2.72mm,优于调焦范围设计要求±2.00mm。
(2)实际测试验证结果优于0.001 8mm,优于调焦分辨率设计要求0.002 0mm。
(3)根据表2,大范围移动时,焦面在水平角和竖直角方向的偏角变化在6″以内,满足10″的设计要求。
(4)根据表3,小范围移动时,焦面在水平角和竖直角方向的偏角变化在1″以内,满足10″的设计要求。
(5)根据表4和图6,由式(4)和式(5)得出调焦系统的最大误差为3σ=3×0.000 4=0.001 2mm。在±2.176 0mm调焦行程范围内,最大误差为1.2μm。参照文献[1,3,9]的测试情况,从调焦精度测试效果来看,性能测试结果较好。

表2 调焦控制系统范围测试
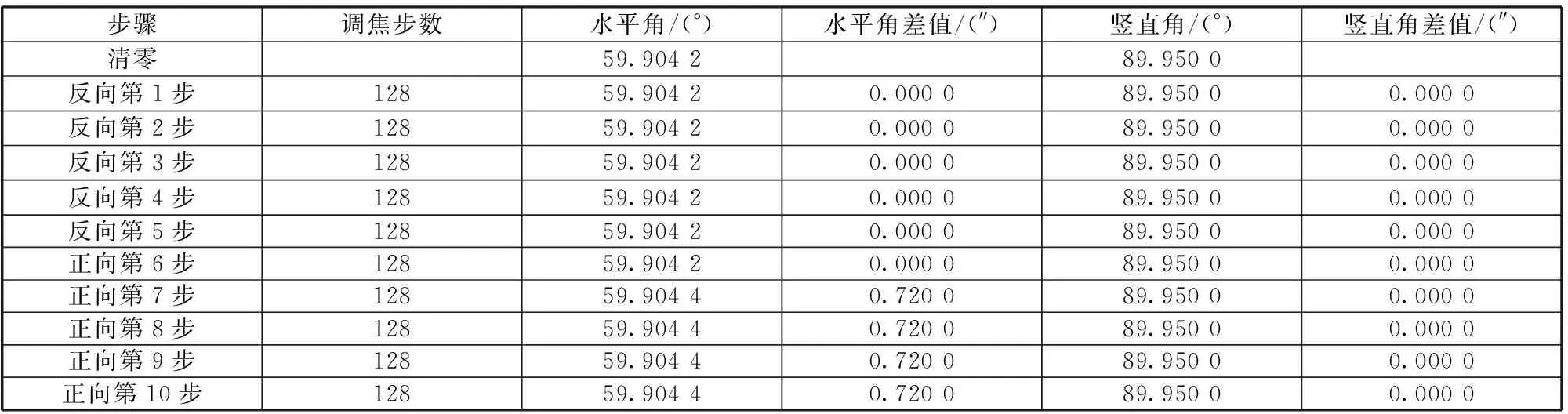
表3 调焦控制系统直线性测试

表4 调焦精度测试
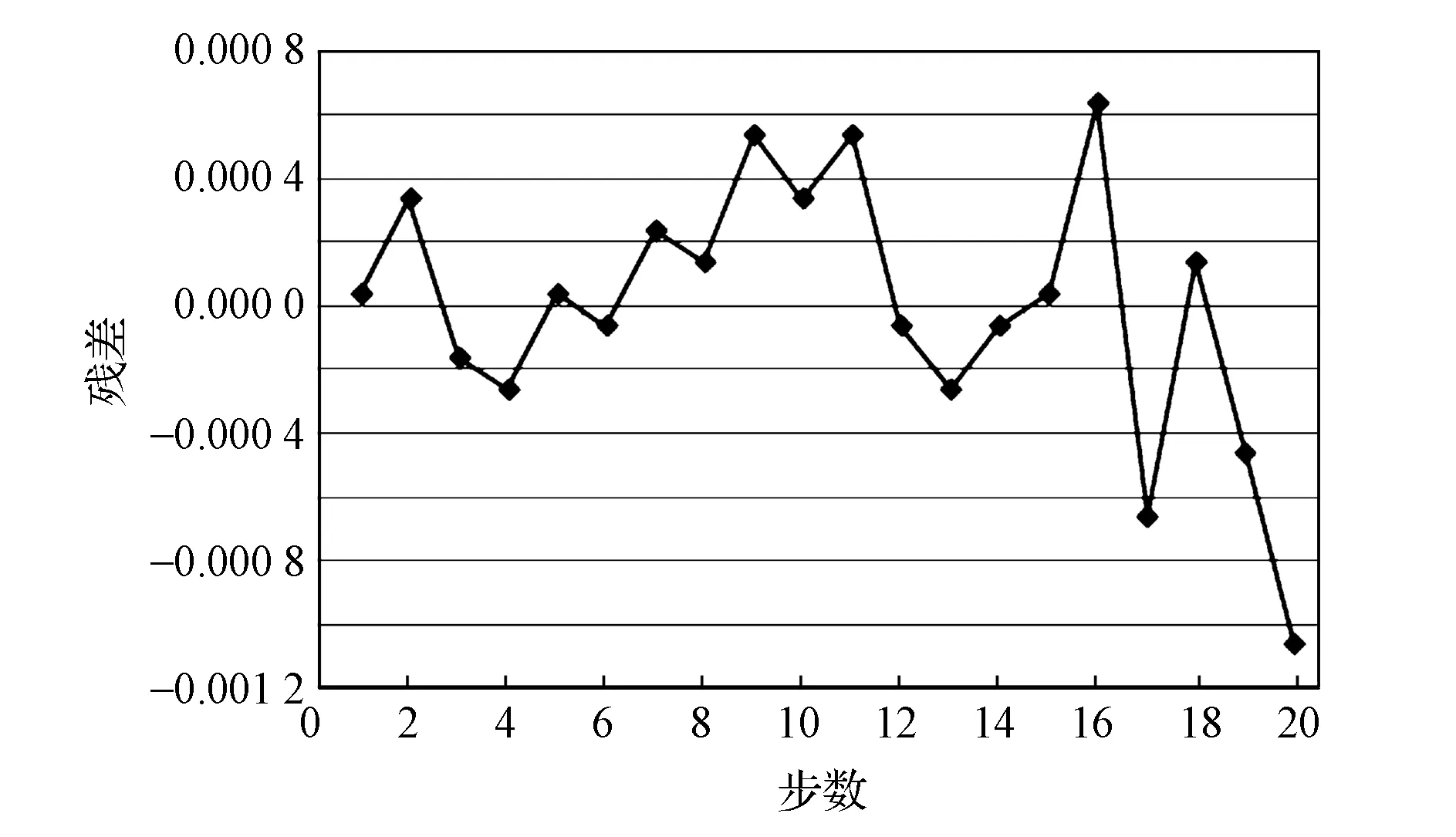
图6 残差Si统计曲线Fig.6 Statistical curve of Si
3.2 调焦控制系统外景成像试验验证
通过实景拍摄更为直观地验证调焦控制系统的性能。图7为某高楼的成像全景图(目标距离2.8 km)。图8为图7中蓝色标识处的局部放大图,其中图8(a)为非最佳焦面处的成像效果,图8(b)为最佳焦面处的成像效果,两者成像效果对比非常明显。图8(c)为图8(b)中红色标识处的局部放大图,其中空调的防护网清晰可见。试验结果表明,调焦精度高,调焦效果好。

图7 调焦试验成像全景图Fig.7 Imaging panorama of focusing test
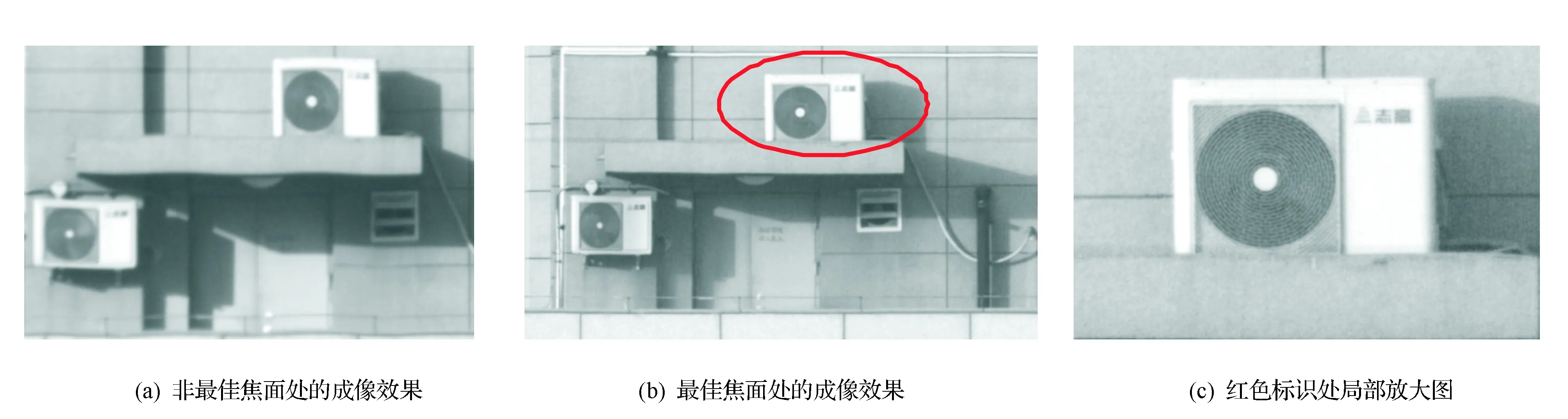
图8 调焦试验成像局部图Fig.8 Imaging local graph of focusing test
4 结束语
本文采用双路直线驱动和高精度、高可靠性的焦面位置遥测设计,结合基于自主决策的闭环反馈控制方法,设计了大幅宽空间光学遥感器调焦控制系统。试验验证结果表明,该调焦控制系统设计精度高、可靠性好,在轨可以实现焦面调整到最佳位置,从而保证系统MTF,提高成像分辨率,提高几何精度,确保成像质量。这对大幅宽空间光学遥感器的研制具有重要意义。
References)
[1] 张海青,张立平,王智.航天立体测绘相机调焦机构的设计与实验研究[J].机械设计与制造,2009(4):57-59
Zhang Haiqing,Zhang Liping,Wang Zhi. Design and experimental research on focusing mechanism of aerial stereo mapping camera [J]. Machinery Design & Manu-facture,2009(4): 57-59 (in Chinese)
[2]吕恒毅,刘扬,薛旭成,等.遥感相机的智能调焦方法[J].红外与激光工程,2012,41(5):1261-1265
Lv Hengyi,Liu Yang,Xue Xucheng,et al. Intelligent focusing method for the remote sensing cameras [J]. Infrared and Laser Engineering,2012,41(5): 1261-1265 (in Chinese)
[3]杨会生,张银鹤,柴方茂,等.离轴三反空间相机调焦机构设计[J].光学精密工程,2013,21(4):948-954
Yang Huisheng,Zhang Yinhe,Chai Fangmao,et al. Design of focusing mechanism for off-axis TMA space camera [J]. Optics and Precision Engineering,2013, 21(4): 948-954 (in Chinese)
[4]何红艳,王小勇,曾湧.CBERS-02B卫星高分辨率相机的在轨调焦方法[J].航天返回与遥感,2008,29(4):12-17
He Hongyan,Wang Xiaoyong,zeng Yong. The on-orbit refocusing method of high-resolution camera of CBERS-02B [J]. Spacecraft Recovery & Remote Sensing,2008, 29(4): 12-17 (in Chinese)
[5]曹启鹏,叶钊,董小静,等.基于图像评价的国外空间相机调焦方法[J].激光与光电子学进展,2015,52(1): 1-8
Cao Qipeng,Ye Zhao, Dong Xiaojing,et al. A method of focusing of foreign space camera based on image eva-luation [J]. Laser & Optoelectronics Progress,2015,52(1) :1-8 (in Chinese)
[6]姜海滨,罗世魁,曹东晶,等.“高分二号”卫星轻小型高分辨率相机技术[J].航天返回与遥感,2015,36(4):25-33
Jiang Haibin,Luo Shikui,Cao Dongjing,et al. Techno-logy of high-density and high-resolution camera of GF-2 satellite [J]. Spacecraft Recovery & Remote Sensing,2015, 36(4): 25-33 (in Chinese)
[7]范斌,蔡伟军,张孝弘,等.“资源三号”卫星多光谱相机技术[J].航天返回与遥感,2012,33(3):75-84
Fan Bin,Cai Weijun,Zhang Xiaohong,et al. Technology of the multi-spectral camera of ZY-3 satellite [J]. Spacecraft Recovery & Remote Sensing,2012, 33(3): 75-84 (in Chinese)
[8]刘亚侠,阮锦.长焦距航天遥感相机离焦对传递函数的影响[J].长春理工大学学报,2004,27(2): 26-28
Liu Yaxia,Ruan Jin. Discussion about off-focus influence on MTF for long focus aerial camera [J]. Journal of Changchun University of Science and Technology,2004, 27(2): 26-28 (in Chinese)
[9]王忠善,何欣,崔永鹏,等.长焦面空间相机调焦机构分析与验证[J].红外与激光工程,2014,43(4): 1206-1209
Wang Zhongshan,He Xin,Cui Yongpeng,et al. Analysis and validation of large size focal-plane focusing device for space camera [J]. Infrared and Laser Engineering,2014, 43(4): 1206-1209 (in Chinese)
[10] 万秋华,孙莹,王树洁,等.双读数系统的航天级绝对式光电编码器设计[J].光学精密工程,2009,17(1):52-57
Wan Qiuhua,Sun Ying,Wang Shujie,et al. Design for space-borne absolute photoelectric encoder of dual numerical system [J]. Optics and Precision Engineering,2009, 17(1): 52-57 (in Chinese)
[11]赵长海,万秋华,梁立辉,等.小型高精度航天级光电编码器[J].电子测量与仪器学报,2015, 29(8): 1224-1230
Zhao Changhai,Wan Qiuhua,Liang Lihui, et al. The small high-precision spaceborne photoelectric encoder [J]. Journal of Electronic Measurement and Instrumentation,2015,29(8): 1224-1230 (in Chinese)
(编辑:夏光)
Design of Focusing Control System for Wide Swath Space Optical Remote Sensor
ZHENG Jun ZHANG Xiaohong LEI Wenping LI Kun ZHANG Zhandong QI Shaofan LI Fuqiang
(Beijing Institute of Space Mechanics & Electricity,Beijing 100094,China)
The traditional focusing control system can not yet satisfy the requirements of large drive force and small size for space optical remote sensor with wide swath. To resolve these problems,the paper proposes a focusing control system design with dual linear drive which can achieve high precision and high reliability focusing control. The focusing control system adopts focal plane position telemetry unit with accurate measurement,focusing control unit with the principle of self-determination, and closed-loop feedback control method including step by step focusing,real-time monitoring and real-time adjustment. The focusing control system can meet the requirements of design,such as large driving force,high precision,concise design and high reliable scheme. The focusing control system is verified by the focusing capacity test and imaging test on the ground,and can be applied to space optical remote sensor with wide swath to ensure the system MTF and imaging quality.
space optical remote sensor; focusing control system; closed-loop control;encoder
2016-10-14;
2017-03-14
国家重大航天工程
郑君,男,硕士,工程师,研究方向为空间光学遥感器电子学总体设计。Email:zhj1766@163.com。
TB811;P407.4
A
10.3969/j.issn.1673-8748.2017.02.009
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
遥测遥控(2022年1期)2022-02-11
锻压装备与制造技术(2021年5期)2021-11-13
科学技术创新(2021年5期)2021-03-17
——编码器
演艺科技(2020年7期)2020-08-13
航天返回与遥感(2020年2期)2020-05-21
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
科技创新导报(2014年28期)2014-12-01
