基于CAN总线的电动叉车工况检测终端
2017-05-16 09:51王强洪占勇朱国强
物联网技术 2017年4期
关键词:电动叉车
王强+洪占勇+朱国强
摘 要:针对目前用户对电动叉车工况检测要求愈来愈高以及各制造商也在不断提高电动叉车状态信息可监控性和安全性的情况,提出以MSP430F149为主控芯片、以CAN现场总线完成数据采集和传输并联合物联网技术设计出一套面向电动叉车的远程工况检测终端系统,实现电动叉车运行状态信息的实时采集,并通过无线传输模块将采集到的信息上传到PC客户端,实现对电动叉车工况的实时远程监测和信息采集。
关键词:电动叉车;MSP430F149;CAN现场总线;工况检测
中图分类号:TP274 文献标识码:A 文章编号:2095-1302(2017)04-00-03
0 引 言
电动叉车在使用过程中,其系统工况直接影响叉车的工作性能和使用效率。并且目前用户对叉车工况监控、维护保养等售后服务的要求也愈来愈高,因此各制造商在不断提高叉车安全性的同时,也在不断提高叉车工况检测、维修等服务能力。其中,叉车工况检测等售后服务水平将是叉车制造商、供应商及销售商为用户提供优质服务的主要着力点之一。研发有实用价值和经济价值的电动叉车工况检测系统,关键在于获取实时状态信息、保存状态信息,从状态信息中判断车辆有无故障。因此设计开发出经济适用的叉车工况检测系统对于电动叉车的安全使用具有深远意义。
1 系统的硬件设计
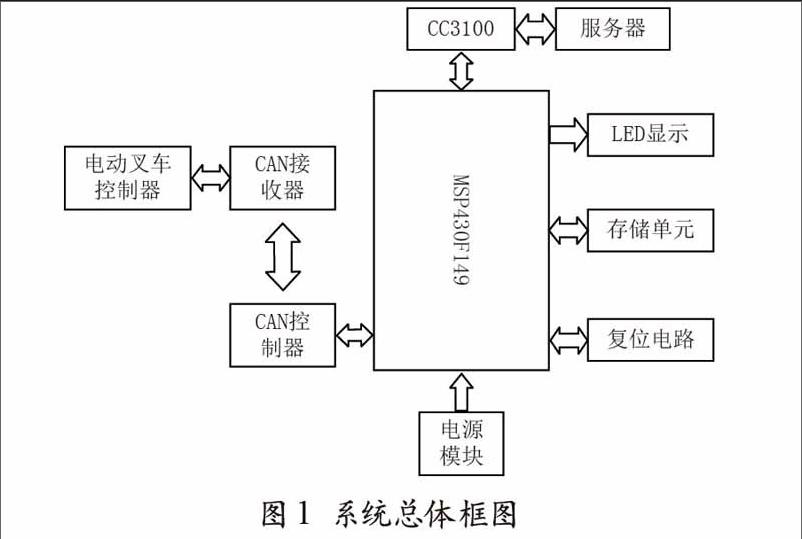
电动叉车工况检测终端的主控芯片采用MSP430F149,通过CAN现场总线与电动叉车的各控制器进行通信,提取控制器内部传感器所获取的电动叉车运行状态信息,进行存储和实时显示。并通过无线网模块与远程服务器相联,使工作人员可远程通过网络检测平台实时监测电动叉车的运行状态。
电动叉车工况检测系统集成了CAN现场总线通信、状态信息存储、信息实时显示、数据远程传输等一系列功能,主要分为主控模块、电源模块、数据存储模块、实时显示模块、CAN通信模块、数据远程传输模块。硬件设计将着重介绍主控模块、电源模块、CAN通信模块、无线传输模块的选择和设计思路。整体系统框图如图1所示。
1.1 主控模块
主控芯片是整个系统的核心,控制着系统中所有模块的协调工作。在本系统设计中主控芯片的功能主要是对整个系统进行初始化;响应SJA1000中断,将监听到的数据从SJA1000中读出,并存储到Flash中;驱动显示模块对采集的实时状态信息进行显示;驱动无线传输模块将采集存储的信息通过网络传输给远端服务器。
MSP430系列单片机是一种16位超低功耗,可实现模拟数字信号、混合信号处理的单片机,具有低电压、超低功耗、处理能力强、系统工作稳定、高性能模拟技术及片上外围模块丰富、开发环境方便灵活等显著特点[1]。本系统采用MSP430F149型单片机,它具有丰富的片上模块,即48个可独立编程的I/O、8路快速12位A/D转换器、3个16位定时器、60 KB的Flash、2 KB的RAM。完全能够满足次检测终端设计对主控芯片的要求。
1.2 电源模块
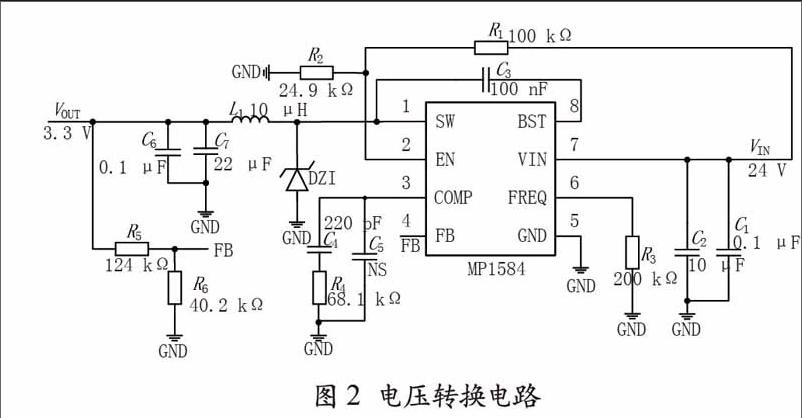
系统的供电由电动叉车车载蓄电池提供,但是叉车车载蓄电池的供电电压为24V,不同于MSP430F149主控芯片的3.3V供电,所以需采用MP1584EN DC-DC转换芯片将24 V电压转换为主控芯片可用的3.3 V工作电压。
MP1584EN是一个高频率、异步的降压开关稳压器,其输入电压的范围为4.5~28 V,具有软件启动、精密的电流限制等特点。1.5 MHz的开关频率使其能有效防止电磁干扰。其24 V电压转3.3 V 电压的转换电路如图2所示。
1.3 CAN通信模块
调研FRC15型号的电动叉车使用CURTIS控制器对叉车的动力和方向进行控制,并监控电动叉车中上百种状态信息参数,提供CAN接口供上位机连接,以进行叉车系统的调试与检测工作。状态信息主控单元通过控制器开放的CAN通讯接口实时获取控制器中的状态参数信息。
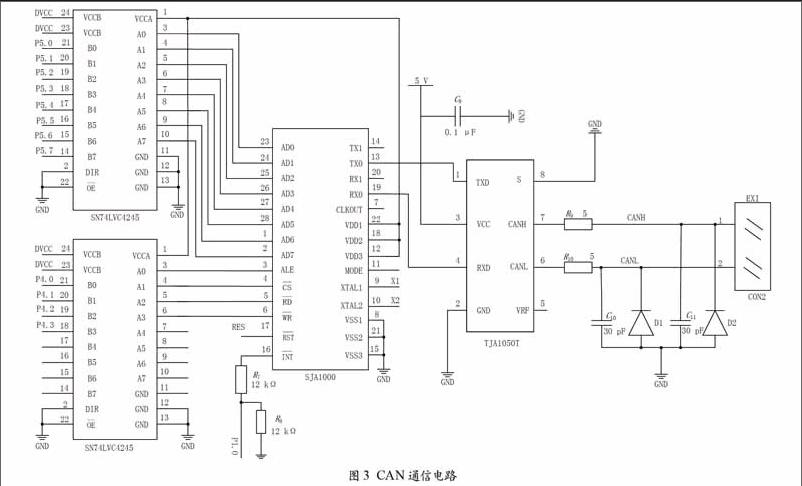
整体的通信模块由CAN控制器(SJA1000)、CAN总线收发(TJA1050T)、双电源移位器74LVC4245等组成, 在系统硬件接口设计时,选用主控芯片P5口作为数据和地址总线对控制器进行数据和地址的操作,选用P4口的部分管脚进行对控制器的读写和使能操作,同时通过P1.0所具有的中断功能对控制器的中断进行响应。CAN通信电路的原理如图3所示。
在CAN通信电路的设计中,为了防止总线接收器TJA1050T遭受过流冲击,在其CANL和CANH引脚与外接端口CON2之间分别串联一个5 Ω的电阻。其次为防止电磁辐射,滤除总线上的高频干扰,在总线收发器的CANL和CANH两引脚和地之间分别连接一个30 pF的电容[2]。TJA1050的电源引脚就近加入0.1 μF去耦电容。此外,在CAN总线的两端和地之间还分别加入了一个瞬变抑制二极管(反接),目的在于总线的过压保护。
在CAN通信电路设计中采用74LVC4245双电源电平移位器来解决MSP430F149主控芯片与CAN控制器SJA1000之间进行数据交换时存在的电平逻辑问题。
1.4 无线传输模块
在国内“互联网+”潮流的背景下,将电动叉车车况监控终端与网络化相联系,进行叉车状态信息远程监控、网络化诊断。实现电动叉车设备的网络化顺应了国内“互联网+”的潮流。
系统设计中,无线网传输模块选用无线WiFi模块CC3100。CC3100包含專用的ARM MCU,此MCU可完全免除主机MCU的处理负担。包含802.11 b/g/n射频、基带和具有强大加密引擎的MAC及嵌入式TCP/IP和TLS/SSL堆栈与HTTP服务器和多个互联网协议[3],大大简化了叉车状态信息主控模块的互联网实现,作为模块的从设备,与远程PC端服务器进行通信。
2 软件平台的设计
文中设计的系统主要对电动叉车进行数据采集、显示、存储以及数据通信。主要程序包括系统的初始化程序、主处理程序、CAN通信程序、显示和存储程序、数据无线发送程序。
2.1 系统的初始化
系统的初始化主要包括主控芯片MSP430F149的初始化、CAN控制器SJA1000的初始化以及无线WiFi模块CC3100的初始化。主控芯片的初始化主要是对端口及定时器进行初始化。CAN控制器SJA1000上电后处于复位状态,必须初始化后才能收发数据。SJA1000的初始化即设置其工作模式,对其时钟分频寄存器、验收滤波、CAN波特率、输出模式进行设置。设置完后清零模式寄存器bit0位退出复位模式,进入正常工作模式。
2.2 主处理程序
系统上电后,首先进行系统初始化,然后判断网络连接状态。进入中断后,CAN通信模块与叉车通信接口连接并通信,以提取数据。微处理器对数据处理后经WiFi无线模块发送至远程服务器。其主程序流程图如图4所示。
2.3 CAN接收子程序
接收流程如图5所示,主流程在中断控制的报文接收之前必须使能CAN控制器的接收中断。验收滤波器对要接收的报文验收后将其放在FIFO,之后产生一个接收中断,主控芯片响应后会将报文存入自身的报文存储器,并置位命令寄存器的释放缓冲区RRB。接收数据的顺序为:采用中断接收,关闭CPU中断,判断是否接受中断,判断是远程帧还是数据帧,读取数据,开中断。
3 实验结果
实验对象为FRC15型号的电动仓储车,作为实验环境的仓储间已被无线网覆盖。在实验过程中,分别在仓储车空载和满载的情况下将本文设计的工况监测终端通过CAN通信接口与仓储车的转向控制器进行通信,实时提取控制器所采集的仓储车运行状态信息。并通过CC3100无线通信模块与远程PC服务器进行通信。远程PC客户端对采集的数据进行实时显示。所显示转向控制器采集的状态信息经处理后如表1所列。
经现场试验后,所设计的工况监测终端能比较准确地提取叉车控制器所采集的状态信息,并能通过无线网模块与远程服务器进行通信,达到设计的要求。
4 结 语
本文所设计的电动叉车工况监控系统通过CAN通信模块和WiFi CC3100无线传输模块可实现对电动叉车运行状态信息的实时获取、上载等功能。设计符合当前用户以及生产商对电动叉车的要求。状态信息主控模块较好的耦合了不同类型控制器的叉车系统,提高了叉车系统状态信息的实时性和开放性,同时还增强了系统的可用性与数据传输的便捷性。远程状态监测的方式也符合物联网概念,顺应电动叉车系统的“互联网+”潮流。
參考文献
[1]洪利,章扬,李世宝.MSP430单片机原理与应用实例详解[M].北京:北京航空航天大学出版社,2011.
[2]龙志强,李晓龙,窦峰山,等.CAN总线技术与应用系统设计[M].北京:机械工业出版社,2013.
[3]德州仪器半导体技术 (上海)有限公司.CC3100使用手册[Z].上海:德州仪器半导体技术(上海)有限公司,2014.
[4]李杰.基于CAN总线的汽车远程故障诊断及驾驶行为的研究[J].电子技术与软件工程,2015,5(24):251-252.
[5]张英,张仁杰.基于CAN总线的汽车远程故障诊断系统研究[J].信息技术,2014,18(10):86-90.
[6]龚文,张辉,熊志.电动汽车远程监控系统[J].计算机与现代化,2014,30(7):98-103.
[7]张明江,袁弘,王滨海,等.基于可靠性的电动汽车监控系统设计与实现[J].制造业自动化,2014,36(5):135-140.
[8]康昊,谭秋林,秦丽,等.基于GPS的车辆安全检测系统[J].计算机测量与控制,2013,21(9):2406-2408.
[9]张昊,崔勇俊,沈三民,等.基于CAN总线的传感器网络设计[J].计算机测量与控制,2013,21(11): 1759-1761.
[10]吴银峰,李立功,易可夫,等.基于CAN总线的无线传感器网络测试系统设计与实现[J].计算机测量与控制,2013,21(7):1759-1761.
[11]岳阳,兰国辉,周红进.基于GSM和CAN总线的数据采集监控系统[J].电子测量技术,2012,35(10):107-109.
[12]陈腾鹏,吴萌岭,缪许敏,等.基于ARM的CAN总线通信节点设计及其在轨道交通制动系统中的应用[J].仪表技术与传感器,2012,49(6):101-102.
猜你喜欢
内燃机与配件(2020年16期)2020-09-10
内燃机与配件(2020年17期)2020-09-10
内燃机与配件(2020年11期)2020-09-10
科学与财富(2020年14期)2020-07-04
商情(2018年25期)2018-07-08
中国新通信(2017年4期)2017-04-10
中国储运(2017年4期)2017-04-08
电机与控制应用(2015年2期)2015-03-01
物流技术与应用(2009年2期)2009-03-07