
磁悬浮离心式压缩机的推力轴承喘振控制
2017-05-17 13:48崔恒斌
自动化仪表 2017年5期
唐 茂,周 瑾,崔恒斌
(南京航空航天大学机电学院,江苏 南京 210016)
磁悬浮离心式压缩机的推力轴承喘振控制
唐 茂,周 瑾,崔恒斌
(南京航空航天大学机电学院,江苏 南京 210016)
压缩机等流体机械在流量减少到一定程度时会发生喘振。针对传统喘振控制方法结构复杂、响应慢、存在功率损失等缺点,提出了一种新的喘振控制方法。通过磁悬浮推力轴承改变压缩机叶轮的叶顶与压缩机蜗壳之间的叶尖间隙,进行喘振控制。通过正弦和方波参考信号跟踪,采用悬浮于不同位置的干扰信号扫频试验,验证了基于控制算法的磁悬浮控制能够满足改变叶尖间隙所需要的位置跟踪性能和悬浮于不同位置的稳定性。设计了基于质量流量反馈控制和基于输出压力反馈控制的控制策略,并进行仿真验证。结果表明:变叶尖间隙喘振控制能够有效起到喘振抑制作用,扩大压缩机稳定运行范围,为磁悬浮流体机械的喘振控制开辟了一个新的方向。
离心式压缩机; 磁悬浮轴承; 叶尖间隙; 喘振控制; 位置跟踪
0 引言
压缩机等流体机械的喘振使转子及定子元件经受交变电场的动应力;级间压力失调引起强烈振动,使密封及轴承损坏,甚至发生转子与定子元件相碰,气体外泄,引起爆炸等恶性事故。因此,需要研究更好、更有效的防喘振措施,以提高离心压缩机的抗喘振能力,避免喘振发生[1]。常用的防喘振控制包括喘振避免和喘振控制。喘振避免包括固定极限流量法和可变极限流量法[2]。这类方法需要考虑一定的喘振裕度,减小了压缩机的工作区域,使压缩机不能在性能最佳的工作点运行。
喘振主动控制是对引起喘振的不稳定气流进行控制,从而防止喘振的发生[3]。目前喘振主动控制方法应用于实际还存在一些问题[4],包括执行器难以安装、成本过高、算法复杂、功率损失。所以研究一种更方便、可靠性更高、响应更快、能减小功率损失的喘振控制方式是很有必要的。
近年来,有学者提出,对于磁悬浮离心式压缩机,利用控制磁悬浮压缩机转子轴向约束的磁悬浮推力轴承,调整压缩机叶轮的叶顶蜗壳之间的叶尖间隙可以实现防喘振控制。这种方法不需要增加额外的硬件,只需要修改磁悬浮推力轴承的控制策略,不影响效率,响应时间快[5]。但相关研究还在起步阶段,在调整叶尖间隙进行喘振控制过程中,需对磁悬浮推力轴承的位置跟踪性能以及在不同悬浮位置的稳定性进行探索。
本文研究了在调整叶尖间隙进行喘振控制过程中,在正弦变化的位置参考信号和呈方波变化的位置参考信号条件下,磁悬浮推力轴承驱动转子改变轴向悬浮位置过程中的位置跟踪性能。通过干扰信号扫频试验,研究了系统在不同悬浮位置的稳定性。最后通过Matlab/Simulink仿真,对比了基于质量流量反馈和基于输出压力反馈的变叶尖间隙喘振控制方法。
1 推力轴承转子系统位置控制性能
1.1 位置跟踪性能
磁悬浮压缩机变叶尖间隙喘振控制原理:根据压缩机系统喘振状态下气体流量或压力的变化,喘振控制器计算出所需要的轴向间隙值,作为位置参考信号输入到磁悬浮推力轴承控制闭环中;磁悬浮推力轴承根据位置参考信号,使转子实际轴向位置发生改变,从而改变叶尖间隙来控制喘振。
在喘振控制过程中,为了改变叶尖间隙,需要磁悬浮推力轴承实时驱动转子改变轴向位置。而在压缩机工作状态下,由于轴向的压强差,会对转子施加轴向的载荷以及其他干扰,所以保证转子的位置跟踪性能以及悬浮在不同位置的稳定性显得尤为重要。
对磁悬浮轴承-转子系统的位置跟踪研究多见于机械加工领域,利用磁悬浮轴承改变刀具位置。Alexander Smirnov、Alexander H.Pesch[6-7]等人研究了径向磁悬浮轴承控制转子进行位置跟踪的性能,同时研究了传统的PID控制及Synthesis等先进鲁棒控制。T.P.Minihan[8]对轴向大间隙的位置跟踪非线性控制算法进行了研究。本文采用鲁棒控制算法,设计磁悬浮控制器,进行磁悬浮推力轴承位置控制性能研究。
根据麦克斯韦原理,得到转子所受的电磁力为:
(1)
式中:x0为悬浮于中间位置的单边气隙,x0=0.46 mm,转子轴位移范围为0~0.92 mm,通过位移传感器转换为电压信号为0~5 V,所以当转子悬浮于中间位置,对应的位移信号为2.5 V;i0为偏置电流;iδ为悬浮位置对应的控制电流;δ为悬浮位置相对于中间位置的变化量;ix为悬浮位置的电流扰动;x为悬浮位置附近的位移扰动;μ0为真空磁导率;A为磁极面积;N为线圈匝数。
由式(1)可知,压缩机转子所受的电磁力随着悬浮位置的改变产生非线性的变化,所以需要研究在足够的位移行程下,H∞控制能否满足位置跟踪需求。位置控制试验采用五自由度两支承磁悬浮轴承-转子试验台。位置跟踪试验原理图如图1所示。
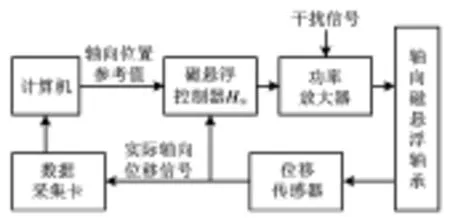
图1 位置跟踪试验原理图
径向与轴悬浮相互独立,忽略旋转对轴向的影响,采用径向静态悬浮对转子轴向位置进行控制。在控制器中,将连续正弦信号离散,即用离散的正弦信号作为喘振控制器输出的位置参考信号。喘振是属于压缩机气体的低频振动[4],所以对位置跟踪性能的研究只考虑较低频率。位置信号跟踪效果图如图2所示。
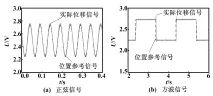
图2 位置信号跟踪效果图
本试验台转子轴向位移行程为0.9 mm,位移传感器测量得到的位移电压信号范围为0~5 V,所以位移传感器的分辨率为0.18 mm/V。位移信号均通过位移传感器转换为电压信号。根据对正弦信号以及方波信号的位置跟踪结果可知,误差波动范围为-0.04~0.06 V。考虑到对转子轴向位置的驱动是在低频范围内,鲁棒控制下的磁悬浮推力轴承系统能满足位置跟踪性能要求。
1.2 转子悬浮于不同位置的稳定性
转子随磁悬浮推力轴承的作用改变悬浮位置。当转子离开中间位置后,两侧气隙不同导致系统刚度阻尼特性也发生了变化,需要判断悬浮在非中间位置时系统是否稳定。
当转子悬浮位置电压分别为1.25 V、1.875 V和2.5 V时,将正弦干扰信号电流通过功放输入线圈作为干扰信号,变化干扰信号频率进行扫频,得到的H∞控制下不同悬浮位置实际位移对干扰信号的频响特性曲线如图3所示。
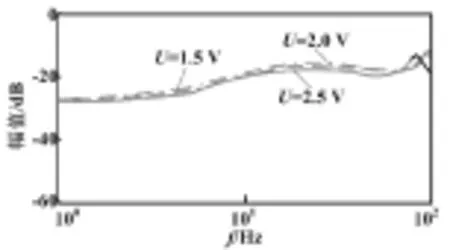
图3 频响特性曲线
由扫频结果可知,在不同的悬浮位置,在低频下幅频特性变化不大;在较高频率,悬浮位置越靠近中间,幅值衰减越快,说明越靠近中间位置,对干扰信号的抑制能力越强。扫频结果表明,H∞控制下的磁悬浮推力轴承系统满足悬浮于不同位置的稳定性要求。
2 变叶尖间隙喘振控制仿真
2.1 叶尖间隙对压缩机性能影响
磁悬浮离心式压缩机系统包括压缩机、管道、存储
气体的气室以及节流阀。压升与质量流量均采用无量纲表示,Ψc为压缩机压升,Φc为缩机质量流量,Ψp为气室压升,Φth为节流阀质量流量。压缩机系统结构简图如图4所示。
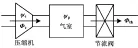
图4 压缩机系统结构简图
无量纲压升与无量纲质量流量的计算公式为:
(2)
(3)
式中:Δp为压力增量;V为压缩机叶轮外轮廓旋转的线速度;ρo1为外界大气密度;Ac为压缩机管道截面积。
压缩机选用文献[9]中型号为 GT70 的高速离心压缩机的参数,压缩机的特性曲线公式为:
(4)
在亚音速流动条件下,节流阀的无量纲质量流量是节流阀开度uth和气室无量纲压升Ψp的函数。
(5)
式中:cth为节流阀常数。
节流阀常数cth取1.2,可得到压缩机特性曲线与节流阀的节流曲线(载荷曲线)如图5所示。其交点为压缩机的稳定工作点。
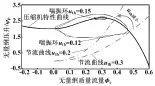
图5 压缩机特性曲线与节流曲线
由图5可知,随着节流阀开度的减小,节流曲线上移,节流曲线与特性曲线的交点即为压缩机工作点。
离心式压缩机中,叶尖间隙的影响通常通过压缩机效率的变化来表示,Senoo和Ishida[9-10]推导了一种用于压缩机泄漏损失的简单模型。当蜗壳与叶轮叶顶之间的叶尖间隙cl与叶轮出口处高度b2的比值为cl/b2<0.1时,效率损失量与间隙和叶轮出口处高度的比值呈比例关系,这种趋势可以表示为:
(6)
Δη为效率变化量,效率η的计算式为:
(7)
在压缩机设计间隙cln下,设计效率ηn:
(8)
可得到在叶尖间隙变化后,实际效率η与设计效率ηn的关系为:
(9)
定义叶尖间隙变化量δcl=cln-cl,间隙常数k0的表达式为:
(10)
则压缩机效率与叶尖间隙变化量的关系可表示为:
(11)
在等熵和理想气体假设条件下,可推导得到叶尖间隙对压缩机压升的影响函数:
(12)
式中:φc=pc/po1为压缩机的压强比;φc,ss为叶尖间隙为设计间隙cln时的压缩机压强比,其值可以根据压缩机特性曲线通过给定的质量流量值得到。
根据式(2)可推导出无量纲压升与压比关系,再结合式(12)得到叶尖间隙影响方程:
(13)
为了便于设计线性的喘振控制器,忽略系统的非线性,对模型进行线性化处理。当δcl=0时,对式(12)泰勒展开并线性化,可得到:
(14)
定义叶尖间隙增益kcl:
(15)
(16)
进行去量纲化,得到:
(17)
采用经典的Greitzer模型对系统进行建模:
Ψc=BωH(Ψc-Ψp)
(18)
(19)
式中:ωH为Helmholtz频率;B为稳定参数,用于预测压缩机系统特性出现不稳定状况的一种定量度量。
在式(18)中加入叶尖间隙影响的Greitzer模型,得到:
(20)
2.2 喘振控制仿真
选择合适的喘振控制算法,采用了基于质量流量反馈的喘振控制算法[5]。该算法结构简单,易于实现,不需要精确的系统模型。
(21)
(22)
式中:Ψeq与Ψeq分别为平衡工作点的压升与质量流量。
(23)
(24)
对式(24)进行时间上求导:
(25)

(26)
假设节流阀开度不变,则工作平衡点不随时间变化,Ψeq与Φeq为常数,可得到:

(27)

(28)
当压缩机状态在稳定平衡点,即Ψp=Ψeq且Φth=Φeq,此时V1=0,根据节流曲线式(5)可知,Vp与Φth是同时增大或同时减小。由此可知,Ψp-Ψeq与Φth-Φeq始终有相同的正负性,则有:
V1=-(Ψp-Ψeq)×(Φth-Φeq)<0
要使系统稳定,根据李雅普诺夫定理,充分条件为V<0,所以要证明V2<0。
(29)
(30)

(31)
(32)
满足上述条件的控制增益kp满足系统大范围渐近稳定性要求。采用Matlab/Simulink软件,对喘振控制系统进行仿真。系统包括磁悬浮推力轴承及轴承控制器,压缩机模型及喘振控制器。喘振控制框图如图6所示。
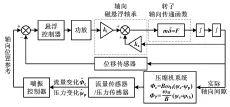
图6 喘振控制框图
当uth=0.14时,质量流量反馈控制结果如图7所示。

图7 质量流量反馈控制结果示意图
根据质量流量反馈控制仿真结果可知,引入喘振控制后,喘振得到有效抑制,并且随着控制增益kp的增大,喘振控制效果增强。
在喘振控制中,能够作为控制系统反馈信号的除了质量流量信号还有压力信号,所以采用输出压力反馈控制,也是一种可研究的控制策略。定义输出压力反馈控制策略:
(33)
同样在节流阀开度为14%,即uth=0.14的情况下,对系统进行仿真。根据输出压力反馈控制的仿真结果可知,当控制增益kp增大到一定值,喘振的压力波动明显减小;但随着kp的继续增大,喘振没有继续减小,并且加入该反馈控制后,喘振的振动频率增大。质量流量反馈控制的控制效果明显优于输出压力反馈控制。
3 结束语
利用磁悬浮推力轴承改变离心式磁悬浮压缩机转子轴向位置,进而改变压缩机叶尖间隙,从而起到对喘振进行主动控制的作用。该方法具有控制简单、无外加硬件、没有效率损失等优点。本文研究了在变叶尖间隙喘振控制中,磁悬浮推力轴承-转子系统的位置控制性能,包括位置跟踪性能以及悬浮在不同位置的稳定性。通过试验表明,在满足喘振控制所需的轴向位置移动范围内,采用H∞控制能够具备满足喘振控制的轴向位置控制性能,位置跟踪误差在允许范围内。随后研究了基于质量流量反馈控制和基于输出压力反馈控制,并进行了对应的仿真。仿真结果表明,输出压力反馈控制具有一定控制效果,但随着控制器增益kp增大,控制效果没有进一步优化,而质量流量反馈控制能够对喘振进行有效控制,压缩机稳定运行范围扩大,控制效果明显优于输出压力反馈控制。
[1] 朱瑞,白晖宇,孟光,等.透平压缩机常见振动故障分析与处理[J].深冷技术,2012(4): 60-66.
[2] 何道清,湛海运,张禾.仪表与自动化[M].北京: 化学工业出版社,2008:242-244.
[3] GU G,BANDA S,SPARKS A.An overview of rotating stall and surge control for axial flow compressors[J].IEEE Transactions on Control Systems Technology,1997,7(6):2786-2791.
[4] 王传鑫.离心压缩机综合控制方法研究[D].大连: 大连理工大学,2010.
[5] SANADGOL D.Active control of surge in centrifugal compressors using magnetic thrust bearing actuation[D].Virginia: University of Virginia,2006.
[6] SMIRNOV A,PESCH A H,PYRHONEN O,et al.High-precision cutting tool tracking with a magnetic bearing spindle[J].Journal of Dynamic Systems Measurement & Control,2015,137(5):51017.
[7] PESCH A H,SMIRNOV A,PYRHONEN O,et al.Magnetic bearing spindle tool tracking through -synthesis robust control[J].IEEE/ASME Transactions on Mechatronics,2015,20(3):1448-1457.
[8] MINIHAN T P,LEI S,SUN G,et al.Large motion tracking control for thrust magnetic bearings with fuzzy logic,sliding mode,and direct linearization[J].Journal of Sound & Vibration,2003,26(3):549-567.
[9] 李瑭珺.离心压缩机喘振模型与稳定性分析[D].上海:上海交通大学,2011.
[10]SENOO Y,ISHIDA M.Deterioration of compressor performance due to tip clearance of centrifugal impellers[J].ASME Journal of Turbomachinery,1987,109(1):55-61.
Surge Control of the Centrifugal Compressor with Magnetic Thrust Bearing
TANG Mao,ZHOU Jin,CUI Hengbin
(College of Mechanical and Electrical Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China)
For fluid machinery,such as compressor,etc.,when the fluid reduces to a certain degree,the surge may occur.Aiming at the weakness of traditional surge control methods,e.g.,complex structure,long response time,and the power loss,etc.,a new control method is proposed.The impeller tip clearance between the top of the impeller and volute of the compressor is changed by adopting maglev trust bearing.Firstly,the maglev control algorithm is verified satisfying the tip clearance control performance and stability by sine and square wave signal tracking experiments and the interference signal frequency sweep experiments in different suspension location.Then,the control strategies based on mass flow feedback control and based on the output pressure feedback control are designed,and verified by simulation.The results show that the new control method changing tip clearance with thrust magnetic bearing can control the surge effectively and expand the range of stable operation of compressor.The research provides a new direction for surge control of magnetic fluid machinery.
Centrifugal compressor; Magnetic bearing; Impeller tip clearance; Surge control; Position tracking
国家自然科学基金资助项目(51675261)、中央高校基本科研业务费专项资金资助、南京航空航天大学研究生创新基地(试验室)开放基金(kfjj20160509)
唐茂(1991—),男,在读硕士研究生,主要研究方向为机电一体化、振动控制。Email:tangm@nuaa.edu.cn。 周瑾(通信作者),女,博士,教授,主要研究方向为磁悬浮技术、机电一体化。Email:zhj@nuaa.edu.cn。
TH138;TP273
A
10.16086/j.cnki.issn1000-0380.201705004
修改稿收到日期:2017-01-15
猜你喜欢
东北电力技术(2022年7期)2022-08-26
设备管理与维修(2022年9期)2022-07-14
小猕猴智力画刊(2022年4期)2022-05-23
石油机械(2022年2期)2022-02-28
小学科学(学生版)(2021年4期)2021-07-23
湖北农机化(2020年4期)2020-07-24
航空发动机(2020年3期)2020-07-24
燃气涡轮试验与研究(2019年5期)2019-12-01
创新作文(小学版)(2019年21期)2019-01-11
军事文摘(2017年16期)2018-01-19
