
电液伺服升降台参数优化仿真设计
2017-06-23 08:54张文群
哈尔滨师范大学自然科学学报 2017年1期
张文群
(合肥通用机械研究院)
电液伺服升降台参数优化仿真设计
张文群
(合肥通用机械研究院)
运用AMESim仿真软件建立电液位置伺服系统图形化模型,根据工程经验预估该模型关键件选型参数及批处理增益参数,进行仿真并对仿真结果进行比较分析,最终取得了液压升降台液压泵选型参数及最佳增益控制参数.所得结果直接指导了某项目汽车制造生产线升降转接设备的工程设计,经实际应用验证,效果良好.
位置伺服;给定量;控制量;批处理;仿真
0 引言
在汽车制造行业,电液伺服升降转接装置在车身转接中得以广泛应用,但不同供应商提供的装置很不一样,要么节拍比较慢要么升降动作有冲击,分析原因多数是模块化选型不合理,或与系统控制不匹配.随着计算机仿真技术的发展,液压系统的软件仿真在产品设计[1-2]及工程设计[3-4]中已得到越来越多的应用,液压仿真分析开始成为液压系统设计[5]的一部分.但这些仿真大多是从产品的角度进行,偏重部件设计,对工程设计来说,多的是模块选型及电气软件设计,因此对工程设计的借鉴性非常有限.为此文章应用Lab AMESim仿真软件平台对电液位置伺服升降装置进行仿真设计,该仿真应用是一个有代表性的仿真设计案例,取得了很好的工程设计应用效果.
1 AMESim简介
Lab AMESim是IMAGINE公司于1995年推出的图形化的开发平台,用于工程系统的建模、仿真和动态性能分析.该软件采用能量端口建模方法,直接表示物理拓扑结构,使用户能从繁琐的数学模型建模工作中解放出来而专注于物理系统本身的设计[6].AMESim仿真平台包含5大功能 软 件:AMESim、AMESet、AMECustom、AMERun和AMEHlep.其中,AMESim功能软件具有面向对象仿真功能,按仿真流程设置有草图模式(Sketch mode)、子模型模式(Submodel mode)、参数模式(Parameter mode)、仿真模式(Simulation mode),是仿真平台的最基本功能应用软件[7].

图1 电液位置伺服系统方框图
2 电液位置伺服系统原理
液压伺服控制通过改变输入信号,连续、成比例地控制流量和压力的液压控制;根据输入信号的方式不同,分为电液伺服控制和机液伺服控制.电液伺服控制通过控制系统,将电信号输入控制系统,控制有关的液压控制元件动作,从而控制液压执行元件跟随输入信号而动作[8];根据被控物理量的不同,分为位置控制、速度控制及压力控制.电液位置伺服系统包含:控制器、数模转换、功率放大器、伺服阀、伺服缸及位置反馈等.该系统主要用于解决位置跟随问题,其根本任务就是通过执行机构实现被控量对给定量的及时准确跟踪,并要有足够的控制精度.该系统工作原理如图1所示.
3 电液位置伺服系统数学模型
文章所述伺服阀频宽较高,系统的固有频率较窄,输入信号e(单位V)和阀芯位移xv(单位m)之间可近似看成一个比例环节,其传递函数如下:

其中Xv(s)为xv的传递函数变量;E(s)为e的传递函数变量;KV为近似线性比例K的传递函数常量.
液压缸活塞的动力学平衡方程:

其中,F为液压缸压力,单位N;Ap为活塞面积,单位s2;pL为压强,单位MPa;xp为活塞位移,单位m;t为时间,单位s;A、B及C为系数.
经过系列转换简化后,液压缸输出位移 xp对伺服阀输入电信号e的传递函数可等效为:

其中XP(s)为xp的传递函数变量;a及b为传递函数系数,数值分别为2和3.
由传递函数可看出这是一个二阶系统,系统设计不合理的情况下容易出现震荡现象,给工程应用会带来负面影响.
4 电液位置伺服系统仿真
4.1 建立仿真模型
在AMESim功能软件的草图模式下,根据电液位置伺服系统的设计结构选择液压模型库中元件子模型,构建整个伺服系统的仿真模型.该模型由信号源、信号比例放大器、电液伺服控制阀、伺服缸、质量负载模块、位置检测模块、溢流阀及液压泵等构成.图2所示为构建的电液位置伺服系统仿真模型.液压泵采用恒压泵模型.伺服电磁阀模型采用三位四通电液伺服阀.草图模式结束后进入子模型模式,在该模式下完成各个子模型的选择匹配.
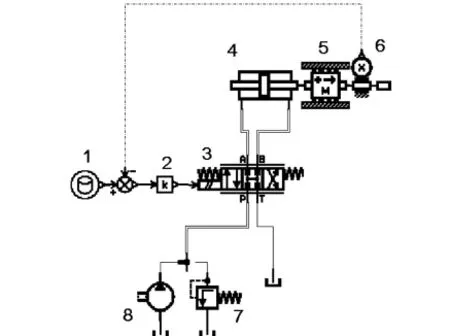
图2 电液位置伺服模型
4.2 仿真模型参数设置
完成草图及子模型模式后,随后进入参数模式(Parameter mode).为了使电液位置伺服系统设计合理,对仿真模型进行合理参数预估是非常重要的.本实验的液压管路、溢流阀及油箱的变量均采用默认值;质量负载模块的质量设置为300 kg;位置检测模块的信号输出增益采用默认值1 V/m;信号源亦即位移给定量为AMETable数据报表,设置的给定量报表如图3所示.电液位置伺服升降装置的升降平台从0 m标高开始上升,8 s后升到1.1 m标高,10 s后升到1.2 m目标高度,然后升降平台稳定在1.2 m标高,以实现升降平台上的车身自动流转.
4.3 预估参数设置
由于工程设计存在专业分工,工程结构设计受制于工艺规划,往往工程设计一开始,机械设计工程师就根据升降结构、升降速度、负载大小及有限的空间等直接选定液压缸,剩下的设计工作交给液压专业及电气专业.故对于文章所述的电液位置伺服系统来说,影响升降转接稳定性最大的因素为液压泵输出能力和放大器增益K,这两个参数在仿真前要根据工程经验或设计手册进行预估.为此文章做了两次批处理仿真实验.液压泵额定转速选型参数为1500 r/min.第一次批处理仿真实验液压泵名义流量设置预估为15 cc/r,对信号放大器增益值K进行预估批处理参数设置,设定的批处理预估参数为:50、100、400、1000;第二次实验设置液压泵名义流量预估为20 cc/r,对信号放大器增益值K进行同样的批处理参数设置.进行批处理预估参数设置是为了在同一个液压泵预估选型结果分析报表上展示不同K值下的动态响应状态,提高仿真效率.批处理预估参数设置如图4所示.
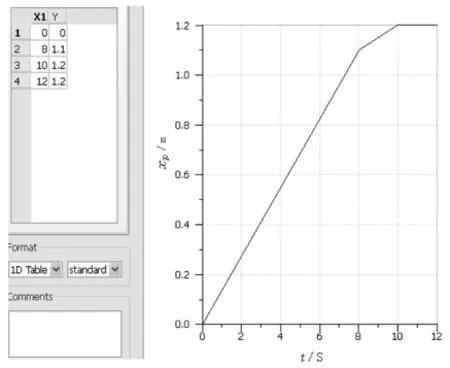
图3 位移给定值图
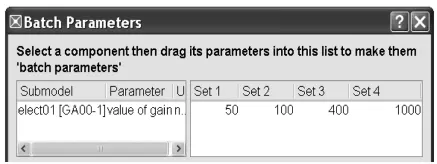
图4 信号放大器K值设置
4.4 仿真、分析及优化
仿真模型参数设置完后,即进入仿真模式(Simulation mode),并启动仿真运行功能.图5为第一次批处理仿真运行后的分析图表,液压泵名义流量为15 cc/r.图6为第二次批处理仿真分析图表,液压泵名义流量为20 cc/r.
分析图5得出第一次批处理实验控制值曲线组明显与图3位移给定值图差异很大,位移曲线斜率明显偏小,即整体上升速度明显偏低;增益值K最佳时,1.2 m目标高度控制值的实现也比给定值慢了2 s;且控制值曲线无减速段.分析图6可以看出第二次批处理仿真实验比较成功,K值最佳时,控制值曲线与给定值曲线基本一致,实现了升降平台10 s后到达1.2 m目标高度的实验要求,随后进入稳定状态.分析图6可以看出,对增益K参数进行预估的4个值中,最佳值为400个单位,K值偏小执行终端动态响应太慢,偏高则执行终端在目标高度随着时间延续有振荡现象,亦即执行终端的升降动作处于不稳定状态.
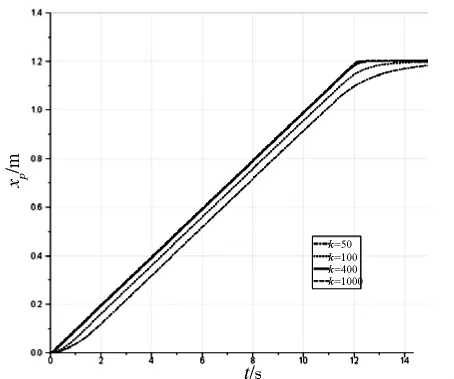
图5 第一次批处理仿真结果
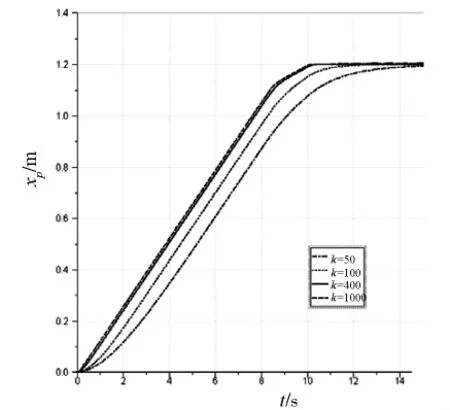
图6 第二次批处理仿真结果
综合分析仿真实验曲线可以得出结论:液压泵的名义流量选型设计及信号放大器的增益设计对电液位置伺服系统位置跟踪能力及动态响应有很大的影响.仿真分析优化结果:本电液伺服系统关键件液压泵名义流量应优化为 20 cc/r,K值推荐为400个单位,此举能降低装备的研发成本、制造成本,又保证装备的生产节拍,还确保了系统的动态响应满足生产工艺要求.
5 结束语
该文中所述AMESim参数优化仿真设计有如下突出优点:首先该优化设计从系统工程的角度,不仅优化硬件选型设计,还优化软件设计;从装备设计的角度,指导了电液伺服升降设备研发过程中硬件方面的机械部件选型及软件控制方面的参数设置,实现了工艺目标;提升了非标电液伺服升降台交货周期短条件下的研发效率;降低了该装置的研发成本.电液伺服升降台参数优化仿真设计技术的应用对工程设计的指导作用明显高效,能显著降低设计验证成本,意义深远,值得推广.
[1]李宝金,廉自生.AMESim环境下安全阀动态特性仿真分析[J].煤矿机械,2012,(6):67-68.
[2]张远深,薛飞,柳志姣,等.基于AMESim的高压气动减压阀的稳定特性[J].液压与气动,2015(9):68-72.
[3]杨昆,初长祥,周永飞,等.基于AMESim的装载机转向快慢特性分析[J].液压与气动,2016(5):102-106.
[4]牛家强.基于CAD/CAE/CAI技术的装载机工作装置及液压系统的研究[D].北京:北京邮电大学,2013.
[5]郭津津,王收军,杨秀萍,等.液压系统CAD_CAE应用技术的教学研究[J].液压与气动,2016(5):51-54.
[6]刘昕晖,陈晋市.AMESim仿真技术在液压系统设计分析中的应用[J].液压与气动,2015(11):1-6.
[7]付永颂,祁晓野.AMESim系统建模和仿真:从入门到精通[M].北京:北京航空航天大学出版社,2006.
[8]左健民.液压与气动技术[M].北京:机械工业出版社,2013.
Parameters Optimization and Simulation Design in Electro-Hydraulic Servo Elevator-Platform
Zhang Wenqun
(Hefei Institute of General Professional Technology)
In AMESim simulation environment,graph digital model of the system is constructed,and the critical part’s model-selecting and batch processing gain parameters are preset according engineer experiences.After simulation and comparative analysis,appropriate model-selecting and gain parameters are produced.The parameters are directly instructive for an automobile manufacture line’s lifting and transferring engineer designing,and the excellent result is proved by practice.
Position servo;Giving value;Control value;Batch processing;Simulation
TH137
:A
:1000-5617(2017)01-0051-04
(责任编辑:李家云)
2016-11-27
猜你喜欢
低温与特气(2022年2期)2022-11-26
科学导报·学术(2020年84期)2020-11-08
电脑爱好者(2019年1期)2019-10-30
通信电源技术(2018年5期)2018-08-23
电脑爱好者(2017年18期)2017-11-03
科技与创新(2017年3期)2017-03-17
电脑知识与技术(2016年22期)2016-10-31
科技与创新(2015年23期)2015-12-08
农业科技与装备(2014年11期)2015-02-02
中国修船(2014年5期)2014-12-18
