荡越式巡检机器人的设计与越障机理
2017-06-29 09:02北京联合大学朱永林闫贵琴杨志成
电子世界 2017年11期
北京联合大学 朱永林 闫贵琴 杨志成 刘 茜
荡越式巡检机器人的设计与越障机理
北京联合大学 朱永林 闫贵琴 杨志成 刘 茜
针对现有巡检机器人越障速度低,提出了一种由机体和双臂结构组成的荡越式巡检机器人,可使越障时间缩短为单摆周期。并在总体设计、行走机构设计和越障机理等方面进行了研究。为了验证机器人结构的合理性,根据机器人机械特性,对其在越障时动力学进行了数学建模分析。利用MATLAB软件对机器人进行动力学仿真,说明了荡越式机器人具备越障速度快、所需电机转矩小的优点。为了进一步验证理论的正确性,制作了样机。通过对机器人试验,机器人能够荡越式越障,证明了设计的正确性。
荡越式;快速搭线脱线;结构设计;越障速度;运动学;仿真

图1 机器人结构示意图
架空电缆需要长期的保护和维护,人工维护劳动强度大、工作环境危险、工作效率低。因此,我国主管单位对巡检机器人的研究非常重视,陆续推出了多款巡检机器人,并在电力部门获得一定程度的应用[1-3]。
但是,就目前推出的机器人系统而言,研究重点大多围绕越障控制问题、障碍自动识别等问题。与实际的应用要求相比,越障过程质心位移平衡式机器人调整时间过长。
1.荡越式电缆巡检机器人总体设计
1.1 机器人总体设计及机体自平衡原理
机器人有一个正四棱柱型的机体,机体的两端各有一条手臂。机器人结构简图如图1所示,每条手臂设计了3个回转关节、1个平移关节和1个旋转关节,回转关节分别是肩部电机、肘部电机、腕部电机;平移关节是电磁阀;旋转关节是行走轮,行走轮安装在行走机构中。机器人越障过程中,一般前臂作为吊挂臂,承担整个身体的重量。同时机体调整姿态也是以前臂动作趋势提前调整。后臂作为工作臂,调节肩关节、肘关节和腕关节的电机转动角度,用于调节手臂的姿态,定位行走轮的搭线角度和位置。=
1.2 行走机构的设计
能过快速实现搭线、脱线是荡越式机器人成功的关键,设计能够快速搭线脱线的机器手尤为重要。行走机构的快速搭线和脱线,在做越障运动时,在动势能转化中减少能量损耗,还可提高越障速度[11]。此装置可以使行走轮从电缆下方直接搭线;从电缆上方直接脱线。它克服了常规电缆机器人在越障时,行走轮需从侧方绕过电缆,才能实现搭线和脱线的繁琐程序。
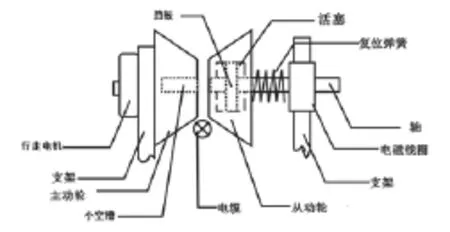
图2 行走机构结构图
2.机器人越障机理
机器人无障碍行走时,两个手臂承受了机器人的重量,机器人机体始终保持水平。其余各关节均处于待命状态,当行走至坡路时,调整一个肘关节夹角就可以很好地控制机器人的身体姿势,该机器人有了较好的适应性。
机器人遇到障碍物时,陀螺仪和加速度传感器测量出机体与地平线的夹角,就可判断机器人的位姿,通过调整肩关节的角度,就可保持机体水平。并以此为参照,控制另一个机器臂的肩关节、肘关节、腕关节和行走机构协调运动,完成其行走轮脱线、越障、搭线等动作。
图中“▇”代表左臂行走机构;“□”代表右臂行走机构。

图3 越障机理过程示意图
如图3(A)所示,机器人遇到障碍物停止前行,此时,两个机器臂均受力。图3(B)所示,左手臂指关节机构脱线,机器人的两个肘关节逐步伸直,机器人的质心下移,整个机器人以右手机构为圆心,以两臂长为半径做半圆周转动。图3(C)右臂回转关节转动,当左臂末端行走轮到达电缆下方时,电磁阀开、合运动,指关节完成搭线动作。如图3(D)所示,机器人完成单臂越障行动。图3(EF)重复图3(BC)运动,区别左右手动作顺序交换。最后,机器人还原初始状态,完成越障过程。与文献[1]蠕动式越障对比,将分解的7个简单动作,组合成3个复合动作,提高了越障速度。
3.机器人受力仿真
从图3所示的巡线机器人越障过程可以看出,由于机器人减少了用于平衡机体的质心机构,手臂的各关节承受的转矩将大大减小。即便如此,为了提高机器人在越障过程中安全性,仍保留两种不同的越障方式,即传统方式越障和荡越方式越障。
设置仿真过程中机器人各部分质量如下: m0=7.63 kg(因为减少了配重模块等),m1=2kg ,m2=l kg,m3= 0.5kg, m4= 1kg,m5=2kg;l1=250mm,l2=350mm,l3=200mm,l4=350mm,l5=250mm。
巡线机器人在荡越障碍物时,由于惯性的存在,手臂从脱线到搭线过程中,机器人由势能转化成动能,再由动能转化为势能。根据机械能守恒定律,机器人越障过程几乎不需要外加动能。现实来说,各个电机的力矩输出也会较小。下面详细分析机器人在越障时各个阶段,双臂各关节的受力情况。
脑,需要读取物资信息时,扫描该物资的身份二维码,即可读取到所需的数据。
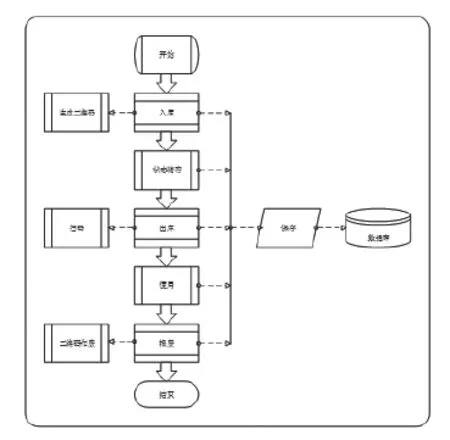
图2 系统工作流程图
3.2 系统工作流程
系统工作流程如图2,物资入库时,用户通过软件客户端录入相关信息,并由二维码生成模块生成该物资唯一的二维码,此时数据全部存入数据库作为初始数据;在储存过程中物资的状态发生改变时,需要在数据库中记录该物资状态变化的信息;物资出库投入使用时可用扫码设备对其扫码识别,以读取初始数据信息;在使用过程中随着使用时间的推移,其对应信息均由系统自动保存入数据库;物资达到使用年限,需报废处理时,在数据库中删除其信息,同时其对应的二维码也随之作废。
4.结束语
二维码技术的兴起和其在购物、支付、信息追踪等各方面的广泛应用,极大的便利了现代人的生活。本文根据基层台站物资管理的特点以及二维码在信息储存等方面的优点和使用的便捷性,论述了二维码技术应用于基层台站物资管理中的可行性和实现方法,为后续基于二维码技术的台站物资管理系统开发提供参考。
[1]刘志海、万丽荣、宋作玲.条码技术及应用技术标准.化学工业出版社.
[2]BarTender具体功能描述. BarTender官网.
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17
农业装备与车辆工程(2021年8期)2021-08-28
南方农机(2021年1期)2021-01-20
童话世界(2020年32期)2020-12-18
今日农业(2020年14期)2020-12-14
港口装卸(2020年3期)2020-06-30
现代营销·理论(2019年10期)2019-09-10
学生天地(2017年10期)2017-05-17
金色少年(奇趣科普)(2016年8期)2016-09-21
我爱学(创意美术与手工)(2016年4期)2016-07-14