
基于卡尔曼滤波算法的车辆振动状态估计与最优控制研究*
2017-07-19 13:38钟孝伟陈双张不扬
汽车技术 2017年5期
钟孝伟陈双张不扬
(1.辽宁工业大学,锦州 121000;2.吉林大学,汽车仿真与控制国家重点实验室,长春 130022)
基于卡尔曼滤波算法的车辆振动状态估计与最优控制研究*
钟孝伟1陈双1张不扬2
(1.辽宁工业大学,锦州 121000;2.吉林大学,汽车仿真与控制国家重点实验室,长春 130022)
在建立2自由度1/4车辆悬架振动模型基础上,提出了利用卡尔曼滤波算法估计车辆行驶振动状态的方法。通过设计卡尔曼滤波算法,对在不平路面上行驶车辆的车身垂向位移、垂向速度和车轮垂向位移、垂向速度状态进行估计,并通过Matlab/Simulink对估计效果进行验证。验证结果表明,该方法能够在不同路面、不同车速下准确估计车辆的相关参数,为汽车主动悬架的最优控制提供了基础。
1 前言
主动悬架能根据汽车的行驶工况对悬架系统的刚度和阻尼特性进行动态自适应调节,使悬架系统始终处于最佳减振状态。在主动悬架控制(特别是容错控制)研究中,车辆的状态估计至关重要,也是悬架控制器设计的基础[1~2]。卡尔曼滤波算法是车辆系统状态估计中比较经典的一种算法,如文献[3]利用卡尔曼滤波算法对汽车横向速度、横摆角速度进行了估计,文献[4]采用卡尔曼滤波算法对汽车纵向和侧向速度进行估计,但目前对悬架状态变量估计的研究较少。
针对汽车主动悬架最优控制中所需的状态变量问题,本文建立了基于卡尔曼滤波算法的车辆振动状态估计模型,用于估算车辆行驶在不平路面时的车身垂向位移、垂向速度、车轮垂向位移、垂向速度,为汽车主动悬架的最优控制提供基础。
2 2自由度1/4车辆模型
建立2自由度1/4车辆悬架动力学模型[5],如图1所示。定义x1为车身垂向位移,x2为车轮垂向位移,kt为轮胎等效刚度,m1为车身质量,m2为车轮质量,kf为弹簧刚度,cf为悬架阻尼系数,q为路面激励。
频域模型是广泛采用的路面模型。路面不平度功率谱密度用指数函数拟合,在一般情况下,当车辆以速度v匀速行驶时,路面不平度功率谱密度表示为:


图1 2自由度1/4车辆悬架模型
由式(1)可得单轮路面不平度的微分方程为:

式中,w(k)为k时刻系统噪声,是均值为0的高斯白噪声;n00=0.01/m为路面空间截止频率。
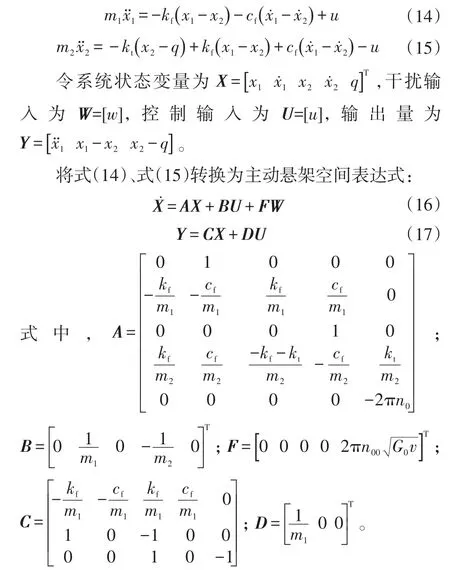
根据牛顿运动定律,得到运动微分方程为[6]:

将式(1)、式(2)转换为主动悬架状态空间形式:

3 卡尔曼滤波算法
在工程实践或控制研究中,受测量硬件成本过高等因素的影响,往往无法得到所需状态变量的真实值,因此需要找到一种低成本且可靠的状态估计方法。随着计算机技术的发展,卡尔曼滤波算法越来越受到人们的青睐。
由于卡尔曼滤波算法将被估计的信号看作白噪声作用下的一个随机线性系统的输出,并且其输入、输出关系是由状态方程和输出方程在时间域内给出的,因此,这种滤波方法不仅适用于平稳随机过程的滤波,而且特别适用于非平稳或平稳马尔科夫序列或高斯-马尔科夫序列的滤波,所以其应用范围十分广泛。
卡尔曼滤波算法是一种时间域滤波方法,采用状态空间描述系统。系统的过程噪声和量测噪声并不是需要滤除的对象,它们的统计特性正是估计过程中需要利用的信息,而被估计量和观测量在不同时刻的一、二阶矩却是不必要知道的。卡尔曼滤波通过实时更新均值和协方差执行滤波过程,基于卡尔曼滤波的状态估计实际上是基于状态变化为一阶马尔科夫过程假设的“预测-校正”的反馈控制器[7]。卡尔曼滤波可分为时间更新过程(预测)和测量更新过程(校正)两部分。时间更新过程根据当前时刻的系统状态获得对下一时刻的先验估计,测量更新过程将测量和先验估计相结合,获得改进的系统后验估计[6~8]。
首先建立包含被估计状态量的车辆动力学系统数学模型:

式中,x(k)、x(k-1)分别为k和(k-1)时刻的状态矢量;y(k)为k时刻的观测矢量。
由于系统是线性的,且系统噪声是高斯分布的,容易得出卡尔曼滤波算法的时间更新和测量更新方程[9]。
a.滤波时间更新
状态预测方程为:

误差协方差预测:

式中,Q(k)为系统噪声的协方差;P(k|k-1)为先验状态估计下的协方差的传播形式,即先验状态估计下的协方差的时间更新表达式。
b.滤波测量更新
增益方程为:

滤波方程为:

后验状态估计下的误差协方差一步更新表达式为:

式中,I为适维单位矩阵;kg即为所求的卡尔曼滤波增益。
4 状态估计结果分析
本文采用的卡尔曼滤波状态估计流程如图2所示。车辆参数如表1所示。

图2 卡尔曼滤波状态估计流程

表1 车辆模型参数
在Matlab/Simulink中搭建卡尔曼滤波算法模型,分别对B级路面70 km/h车速工况下和C级路面40 km/h车速工况下的车辆振动状态进行估计,估计值与仿真值的对比如图3、图4所示。

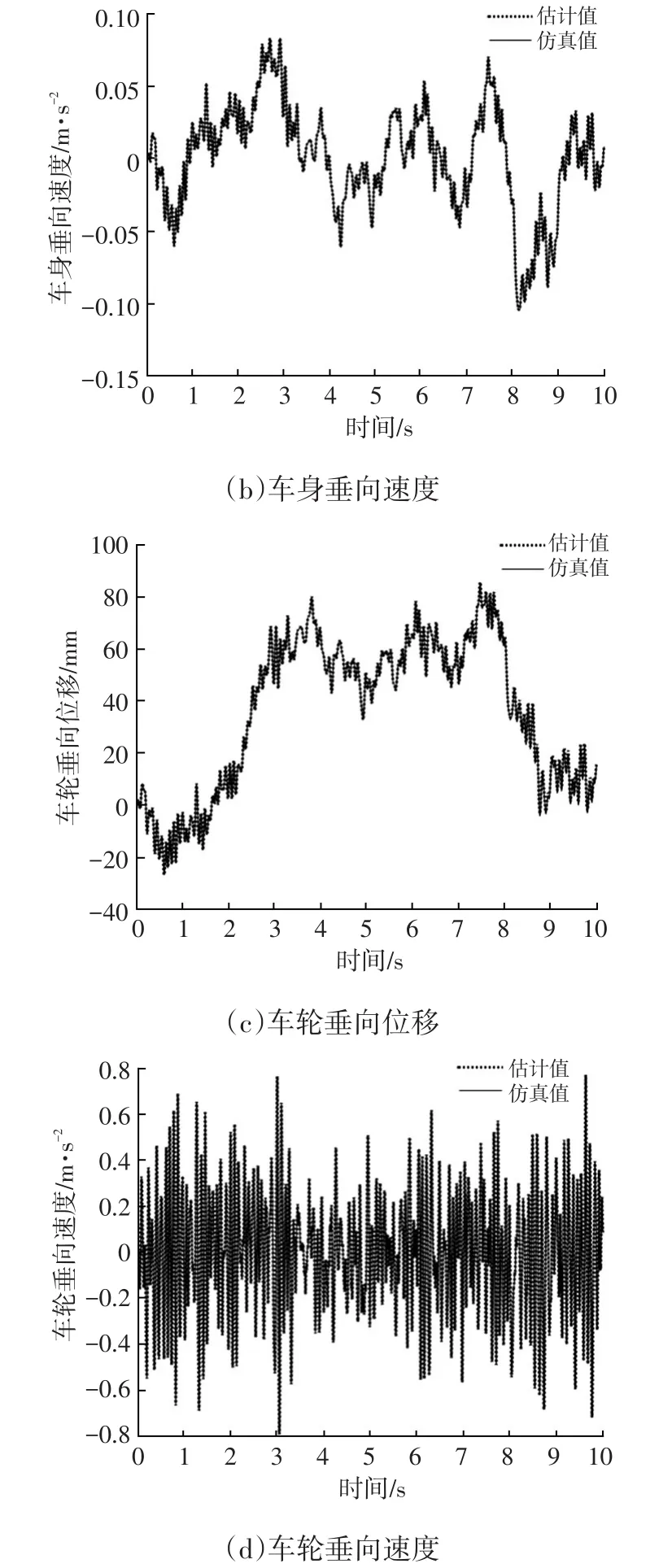
图3 B级路面70 km/h车速工况下车辆振动状态估计值与仿真值
由图3、图4可以看出,所设计的卡尔曼滤波算法能够较好地对不同等级路面、不同车速状态下的悬架状态变量进行估计,车身垂向速度和车轮垂向速度估计结果重合度很高。虽然车身位移和车轮位移估计结果存在一定的偏差,但与仿真结果趋势完全一致。各状态变量估计误差值见表2。

表2 状态量估计误差 %

图4 C级路面40 km/h车速工况下车辆振动状态估计值与仿真值
由表2可以看出,两种工况下悬架状态变量估计值均方根误差均较小,可用于悬架最优控制。
5 基于状态估计的悬架最优控制
在图1的基础上将其改为主动悬架,车辆模型如图5所示,其中,u为作动器控制力。

图5 2自由度1/4车辆主动悬架模型
根据牛顿运动定律,主动悬架运动微分方程为[5]:
对主动悬架采用线性二次型最优控制[10],其中悬架的状态变量均采用卡尔曼算法估计值,考虑到汽车行驶平顺性、操纵稳定性和降低能耗的要求,选取车身垂向加速度、悬架动挠度(x1-x2)、轮胎动行程(x2-q)和控制输入u作为性能评价指标。采用状态调节器,其指标泛函为:

整理成标准二次型形式:

式中,q1、q2、q3、q4为性能评价指标的加权系数。
在 Matlab中调用 LQG工具箱,求得控制率[K,S,e]=lqr(A,B,Q,R,N),K即为所求的最优反馈控制率,改变q1、q2、q3、q4的值,反复调试,直到出现良好的控制效果,得到q1=10 000、q2=100、q3=100、q4=0.085。
在Matlab/Simulink中搭建车辆模型,对采用估计的状态变量设计的LQG控制器进行仿真验证,控制效果如图6所示,各性能指标结果如表3所示。

图6 仿真验证结果
由仿真验证结果可知,在基于卡尔曼的LQG控制下,车身垂向加速度降低了29.87%,悬架动挠度增加了17.99%,轮胎动行程增加了33.04%。最优控制较大程度地降低了车身垂向加速度,因此,造成悬架动挠度稍有增加,同时也牺牲了一部分轮胎动行程。

表3 主、被动悬架性能响应对比
6 结束语
a.采用的卡尔曼滤波算法能够很好地对车辆悬架振动的状态变量进行估计,且在不同车速、不同路面下均有较好的可靠性,可用于汽车主动悬架控制。
b.在主动悬架最优控制基础上,由卡尔曼算法估计出的状态变量可代替传感器测量值,可满足预期的控制效果,且降低了成本。
c.设计的卡尔曼滤波算法还可以用于控制系统故障检测与诊断,为主动悬架容错控制提供信息,提高控制的可靠性。
1 张俊智,王丽芳,葛安林,等.汽车容错控制技术.汽车技术,1997(2):56~59.
2 闻新,张洪钺,周露.控制系统的故障诊断与容错控制.北京:机械工业出版社,1998.
3 包瑞新,贾敏,Sabbioni E,等.基于扩展Kalman粒子滤波的汽车行驶状态和参数估计.农业机械学报,2015,46(2):301~306.
4 时艳茹.基于UKF滤波的汽车纵向和侧向速度估计算法研究:[学位论文].长春:吉林大学,2011.
5 喻凡,林逸.汽车系统动力学.北京:机械工业出版社,2014.
6 芦冰,解小华,蔡可天,等.UKF车速估计器的算法研究与仿真.吉林大学学报:信息科学版,2015,33(1):7~11.
7 Simon D.最优状态估计.北京:国防工业出版社,2013.
8 李刚,赵德阳,解瑞春,等.基于改进的Sage-Husa自适应扩展卡尔曼滤波的车辆状态估计.汽车工程,2015,37(12):1426~1432.
9 张嗣瀛,高立群.现代控制理论.北京:清华大学出版社,2006.
(责任编辑 斛 畔)
修改稿收到日期为2017年3月27日。
Research on State Estimation and Optimal Control of Vehicle Vibration Based on Kalman Filter Algorithm
Zhong Xiaowei1,Chen Shuang1,Zhang Buyang2
(1.Liaoning University of Technology,Jinzhou 121000;2.State Key Laboratory of Automotive Simulation and Control, Jilin University,Changchun 130022)
Based on the establishment of the two-degree-of-freedom 1/4 vehicle active suspension vibration model, the method to estimate vehicle vibration state by using Kalman filter algorithm was proposed.The vertical displacement and vertical velocity of the body and wheel of vehicles on uneven road surface were estimated by the design of the Kalman filter algorithm,and the estimation effect was verified by Matlab/Simulink.The results show that the proposed Kalman filter algorithm can accurately estimate the relevant vehicle parameters at different speeds and on different road surfaces, providing foundation for the optimal control of active suspension.
Automobile suspension,State estimation,Kalman filter
汽车悬架 状态估计 卡尔曼滤波
U461.4
A
1000-3703(2017)05-0014-05
国家自然科学基金项目(51605213);辽宁省科技厅项目(201602367);辽宁省教育厅科学研究项目(L2015227)。
陈双(1979—),女,辽宁锦州人,博士,副教授,研究方向为车辆系统动力学及控制,cslxy74@163.com。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
北京航空航天大学学报(2021年7期)2021-08-13
北京航空航天大学学报(2021年6期)2021-07-20
时代汽车(2021年1期)2021-03-03
电脑知识与技术(2020年15期)2020-07-04
北京汽车(2019年4期)2019-09-17
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
