子阵级数字阵列雷达单脉冲测角精度影响因素分析
2017-08-07 07:19张洪波
航天电子对抗 2017年3期
张洪波
(海军航空工程应用所,北京 100071)
·工程应用·
子阵级数字阵列雷达单脉冲测角精度影响因素分析
张洪波
(海军航空工程应用所,北京 100071)
为了提高子阵级数字阵列雷达(DAR)单脉冲测角精度以及算法稳健性,针对数字干涉法和数字相位和差单脉冲测角方法进行了对比试验性仿真。对基于子阵级DAR的两种方法进行了原理分析和测角建模,并重点针对影响测角性能的主要因素如信噪比、幅相误差(重点是子阵级)以及波束指向偏差等进行了性能对比仿真分析,仿真结果表明:当目标信噪比超过10dB时,干涉测角算法测角性能比相位和差法更加稳健(尤其是当波束指向误差较大时)。仿真结果和结论可以为子阵级DAR系统工程化设计提供参考。
数字单脉冲测角;干涉测角;相位和差
0 引言
与常规单脉冲测角相比,数字单脉冲测角[1-2]具有处理方式灵活、测角精度[3]相对更高的优点,但对于子阵级数字阵列雷达(DAR)而言,其测角性能除了受常规相控阵雷达阵元级幅相误差、信噪比、波束指向偏差等因素影响以外,还受到子阵级幅相误差的影响。
相位和差法与干涉法是机载雷达常用的两种测角方法,相关研究文献较多,如文献[1~2,4]主要对基于DAR的数字和差单脉冲测角问题进行了一维线阵或二维面阵的不同形式下单脉冲和差测角方法探讨,文献[5~7]分别研究了干涉测向解模糊方法、极化误差、入射角影响等。本文对两种数字单脉冲测角方法进行了两维面阵的对比仿真研究,具体包括信噪比、幅相误差、波束指向偏差等主要测角性能影响因素的分析,从而为子阵级DAR系统参数设计提供参考。
1 数字单脉冲测角原理
1.1 数字干涉测角
干涉测角原理如图1所示。
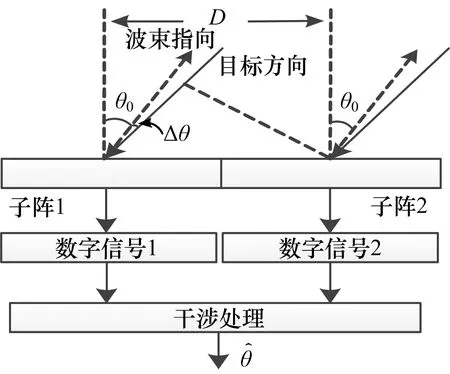
图1 干涉单脉冲测角原理图
图1中,两子阵相位中心距离为D,假设雷达波束指向角为θ0,目标位于θ0+Δθ(|Δθ|≤θB/2,θB为雷达当前波束宽度)处,则两子阵的接收信号为:
y1(t)=s(t)
(1)
y2(t)=s(t)e-j2πDsin(θ0+Δθ)/λ
(2)
对两路信号进行数字化并干涉处理可得:
Δy(n) =y1(n)conj(y2(n))e-j2πDsinθ0/λ
≈|s(n)|2ej2πDΔθcosθ0/λ
(3)
式中,conj(·)表示取共轭。由于Δθ远小于1,因此有cosΔθ≈1,sinΔθ≈Δθ。
则目标角度估计值为:
(4)
式中,arg(Δy)表示取Δy的辐角主值。
1.2 数字相位和差测角
图2显示了相位和差测角原理。
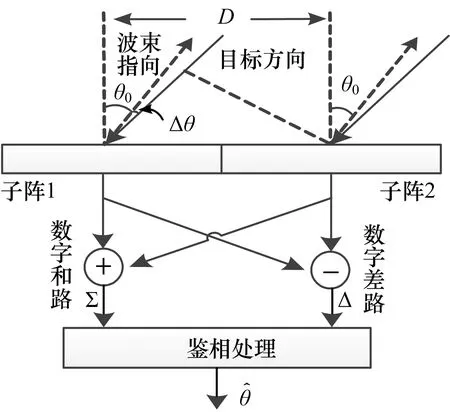
图2 相位和差单脉冲测角原理图
文献[8]阐明,经过子阵中移相器移相补偿后,实际送到数字波束形成器的两子阵接收信号相位差为δφ:
δφ=2πDcosθ0sinΔθ/λ≈2πDcosθ0Δθ/λ
(5)
等式(5)的近似条件同等式(3)。因此:
Δθ=λδφ/(2πDcosθ0)
(6)
设天线两子阵增益相同,经移相、数字下变频、AD采样等处理后两路信号可分别表示为:
s1(n,θ)=S(n)e-jδφ
(7)
s2(n,θ)=S(n)
(8)
得到数字和、差信号分别为:
∑(n,θ)=s2(n,θ)+s1(n,θ)=S(n)(1+e-jδφ)
(9)
Δ(n,θ)=s2(n,θ)-s1(n,θ)=S(n)(1-e-jδφ)
(10)
对以上差、和信号进行归一化处理,可得比值K(θ)为:
K(θ)=Δ(n,θ)/∑(n,θ)=jtan(δφ/2)
(11)
则:
δφ=2arctan(imag(K(θ)))
(12)
式中,imag(·)表示取虚部。将式(12)代入式(6)得到:
Δθ=arctan(imag(K(θ)))/K
(13)
式中,K=πDcosθ0/λ,可以通过公式计算获得,也可以通过数字和差方向图差斜率拟合[9]估计得到。因此目标角度估计值为:

(14)
2 仿真结果及分析
理论上,单脉冲测角的单次测量精度的极限值可以表示为:
σΔθ=θ3dB/(Km(S/N)1/2)
(15)
式中,θ3dB表示3dB波束宽度,Km表示单脉冲测角灵敏度函数或差斜率,它与天线方向图形状有关,而天线形状又与阵元数、幅相误差、加权方式等因素密切相关。S/N表示目标信号信噪比。可以看出,波束宽度越窄,单脉冲测角精度越高。因此,不同的波束指向角会影响测角精度。波束指向角偏离法向越大,波束宽度越宽,测角误差越大。波束指向偏差主要影响目标信噪比和差波束零深,波束指向偏差越大,目标信噪比越低,差波束零深抬高,测角精度越低。对于子阵级数字阵列雷达而言,子阵级幅相误差对天线方向图的影响要远大于阵元级幅相误差的影响。因此,本文针对性地对信噪比、子阵级幅相误差、波束指向偏差等几大因素进行了仿真与分析。
仿真条件:非均匀划分8子阵,单个子阵阵元数80~160不等;X波段载频,阵元间距半波长。假设子阵级、阵元级两级幅相误差均服从均匀分布,设置仿真参数如表1所示。
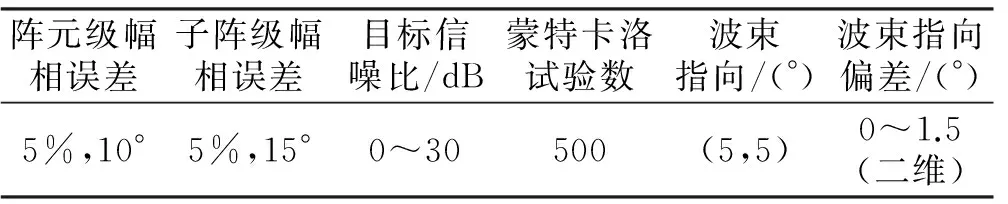
表1 仿真参数表
注:表中波束指向方位角在前,下同。
为了分析信噪比、子阵级幅相误差以及波束指向偏差对测角精度的影响,分别进行以下三组仿真,以均方根误差作为测角精度评价指标进行统计分析。
2.1 信噪比对测角精度影响分析
假设阵元级幅相误差分别为5%、10°,子阵级幅相误差分别为5%、15°,二维波束指向(方位在前,下同)及指向偏差分别为(5°,5°)、(-1.5°,-1.5°),进行500次蒙特卡洛仿真得到信噪比0~30dB的两种测角方法测角精度曲线,如图3所示。
图3 不同信噪比下的二维测角精度
图3仿真结果表明:1)在其它仿真条件一定的情况下,随着信噪比由0dB逐渐增加至30dB,两种方法的测角精度均逐渐收敛。2)波束指向偏差较小时(如0.1°),两种方法随SNR变化的测角精度相差不多;随着波束指向偏差逐渐增大到0.8°,信噪比超过20dB时干涉法测角精度才会略优于相位和差法,约0.03°;值得注意的是,当波束指向偏差到1.5°时,小信噪比(低于10dB)情况下,两者测角精度基本相当;当信噪比超过10dB时,干涉法测角精度高于相位和差法(信噪比30dB时相差约0.08°)。事实上,主要原因是相位和差法在角度测量过程中需要估计差和比斜率,此过程产生了额外的估计误差。
2.2 子阵级幅相误差对测角精度影响分析
将2.1节仿真条件中信噪比固定为15dB、子阵级相位误差随机取值范围的绝对值由0°逐渐增加到15°,其它仿真条件不变,得到如图4所示仿真结果。
图4 不同子阵级幅相误差下的二维测角精度
图4仿真结果表明:1)当其它仿真条件不变时,随着子阵级相位误差随机取值范围的绝对值由0°逐渐增加到15°,两种测角方法的均方根误差整体上均逐渐增加。2)波束指向偏差0.1°时,两者测角精度相差无几;随着波束指向偏差增加到0.8°时,干涉测角精度优于相位和差法约0.03°;当波束指向偏差进一步增加到1.5°时,随着子阵级相位误差的逐渐增加,两者的测角误差均方根值相差0.08°左右。
仿真结果中,测角精度出现一定程度的波动是由于存在两级相互独立随机幅相误差的缘故(下同)。
2.3 波束指向偏差对测角精度影响分析
将2.1节仿真条件中信噪比固定为15dB、波束指向偏差0°~1.5°(方位俯仰均同步变化),其它仿真条件不变,得到仿真结果如图5所示。

图5 不同波束指向偏差下的二维测角精度
由图5可以看出,随着波束指向偏差由理想情况(0°)逐渐增加到1.5°,两种测角方法的均方根误差整体上均逐渐增加。
其它仿真条件相同,波束指向偏差在0.7°以内时,两种方法测角精度基本相当(最大相差约0.01°);随着波束指向偏差由0.75°增加至1.5°,干涉测角精度优势逐步显现,至波束指向误差1.5°时均方根误差已相差达0.06°。
以上三组仿真结果表明:在阵元级幅相误差分别为5%、10°,子阵级幅相误差分别为5%、15°,且波束指向偏差在半波束宽度范围内的情况下,大信噪比(15dB及以上)时干涉测角精度整体上相对更高(最大相差约0.1°)。由此说明,干涉法测角在较大信噪比(超过10dB)情况下测角稳健性比相位和差法更优,更有利于工程化应用。
3 结束语
本文仿真分析了信噪比、子阵级相位误差和波束指向偏差对子阵级DAR测角精度的影响,并对两种测角方法进行了对比分析,得出了相应的结论。研究结果可以为子阵级DAR系统参数设计提供参考。■
[1] 朱伟,陈伯孝,周琦.两维数字阵列雷达的数字单脉冲测角方法[J].系统工程与电子技术,2011,33(7):1503-1508.
[2] 杨晓倩,刘海波,姜菡,等.基于数字阵列雷达的单脉冲测角技术研究[J].空军预警学院学报,2013,27(3):184-187.
[3] Richard ON.Accuracy of angle estimation with monopulse processing using two beams[J].IEEE Trans.on Aerospace and Electronic Systems, 2001,37(4):1419-1423.
[4] 杨雪亚,刘张林.子阵级和差波束形成及测角方法研究[J].中国电子科学研究院学报,2015,10(1):82-86.
[5] 郭斌兴,张永杰.一种旋转相位干涉仪测角解模糊方法[J].弹箭与制导学报, 2015,35(2):185-189.
[6] 戴幻晓,申绪涧,乔会东,等.基于极化误差的干涉仪测角性能建模与仿真[J].计算机仿真,2013,30(10):237-240.
[7] 纪强,罗义军,李劲,等.实际入射角的相位干涉仪测角方法[J].中国空间科学技术,2012,(1):72-76.
[8] 张光义,赵玉洁.相控阵雷达技术[M].北京:电子工业出版社,2006:225-228.
[9] 韩彦明,陈希信.自适应和差波束形成与单脉冲测角研究[J].现代雷达,2010,32(12):44-47.
Analysis of digital monopulse angle estimation precision of DAR at subarray-level
Zhang Hongbo
(Naval Aviation Engineering Application Institute, Beijing 100071, China)
In order to improve digital monopulse angle estimation accuracy and algorithm stability of digital array radar(DAR) at subarray-level, comparative simulation experiments of two methods are carried out, including digital interferometry and digital sum-difference phase-comparison. Firstly, principles and modeling of two methods are introduced, and then the performance comparison and analysis are developed, including several main factors which impact on angle measuring accuracy: the signal-to-noise ratio(SNR), the amplitude and phase errors at subarray-level, the beam pointing errors etc. Simulation results show that: when target SNR exceed 10dB, the interferometric algorithm can obtain more robustness especially in large beam pointing errors. The simulation results and conclusion can be used for guiding subarray-level DAR system engineering.
digital monopulse angle estimation; interferometric DOA estimation; sum-difference phase comparison
2017-02-21;2017-04-12修回。
张洪波(1967-),女,高工,主要研究方向为通讯和电子。
TN971+.5;TN974
A
猜你喜欢
信息通信技术(2022年2期)2022-05-31
现代仪器与医疗(2022年1期)2022-04-19
北京理工大学学报(2021年12期)2022-01-13
火控雷达技术(2021年1期)2021-04-20
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
舰船电子对抗(2020年1期)2020-04-27
舰船科学技术(2020年3期)2020-04-22
北京航空航天大学学报(2019年9期)2019-10-26
计算机测量与控制(2018年10期)2018-10-18