
地面LIDAR在地籍测量中的应用
2017-08-22 13:09贾娜娜魏建新
湖北农业科学 2017年14期
贾娜娜+魏建新

摘要:随着科学技术的不断发展与完善,三维激光雷达技术在地籍测量中得到广泛应用。为了更加完善地籍测绘任务,使用地面激光雷达系统对新疆伊犁地区进行地籍测量,通过实例操作,并进行精度验证,最终得到较传统测量更加客观的效果,为地籍测量提出了一种更加方便、高效率、高精准的测量方法。
关键词:地面激光雷达;点云数据;地籍测量;数据处理
中图分类号:P271 文献标识码:A 文章编号:0439-8114(2017)14-2605-05
DOI:10.14088/j.cnki.issn0439-8114.2017.14.002
Abstract: With the continuous development and improvement of science and technology, the 3D laser radar technology in the cadastral survey is widely used. In order to be more perfect cadastral surveying and mapping tasks, this article USES the ground laser radar system in xinjiang ili region for cadastral survey, through the instance, and the precision verification, get more objective than traditional measurement effect, put forward a more convenient for cadastral survey, high efficiency, high precision of a measurement method.
Key words: ground laser radar; point cloud data; cadastral surveying; data processing
隨着高科技术的快速发展,地籍测量的发展经历了多次技术革新,而现阶段的地籍测量也多与现代技术相结合。目前,地籍测量领域中应用到的新技术主要包括电磁感应测量法、雷达探地测量、GIS等高新技术[1],这些技术共同组成了现阶段地籍测绘体系。采用高端科学技术手段辅助地籍调查,可以更加准确快捷地完成土地调查工作[2]。这些高新技术在地籍测绘体系中发挥着重要作用,激光雷达系统就是其中的代表,这给中国地籍测绘工作的发展带来了很大契机。
近年来,激光雷达已成为测绘领域中的一个新的研究热点,这一高新技术在地籍测绘中发挥着重要作用[3]。激光雷达技术可为空间三维信息数据的获取提供全新的技术手段,采用非接触式主动测量方法,快速采集、获取目标物高分辨率数据以及空间三维坐标数据。本研究主要介绍了地面激光雷达的基本原理、系统特点及应用领域,并将其技术成功应用于新疆伊犁地区霍城县地籍测量中。通过实践表明激光雷达技术能够成功应用在地籍测绘中,并可显著提高地籍测绘的效率与精度。
1 激光雷达系统介绍
激光雷达(Light Detection and Ranging,LIDAR)是近几十年来摄影测量和遥感领域最具革命性的成就之一,也是继GPS全球定位系统之后又一项崭新的革命性测量工具[4]。激光雷达技术是一种可以精确、快速获取地面或大气三维空间坐标的主动遥感技术,激光雷达按照不同的运载平台可以分为地基LIDAR、机载LIDAR及星载LIDAR。
1.1 地面激光雷达
地面激光雷达是一种集成了多种高新技术,采用非接触高速激光测量方式,利用激光束对扫描物体进行大面积、高速度、高精度、大密度扫描[5],以点云的形式获取被测目标物的三维坐标及复杂物体三维表面的阵列式几何图形数据的一种新型测量设备。其中,被激光束扫描经过的位置均以三维点的形式被记录下来,测量得到的目标每个反射点的相对坐标数据被称为点云数据。
1)地面激光雷达的构造组成。地面三维激光扫描仪主要由扫描系统、控制系统和电源系统三部分构成,其中核心是扫描系统,其组成部分主要包括激光测距系统、激光测角系统、CCD相机和仪器控制校正系统等。激光发射装置激发射出激光束,激光束通过旋转反光镜反射,从发射窗口射出之后在空间范围内进行扫描,与之发生接触的位置或物体均以三维空间坐标点的形式记录下来。
2)地面激光雷达的测量定位原理。地面激光雷达主要通过仪器自身发射激光束到旋转式镜头中心,镜头通过快速而有序地旋转将激光依次扫过被测区域,一旦接触到物体,光束立刻被反射回扫描仪,根据光束的飞行时间可计算出激光光斑与扫描仪两者之间的距离[6]。与此同时,仪器通过内置角度测量系统来测量每一激光束的水平角与竖直角,进而获得每一个扫描点在扫描仪所定义坐标系内的X、Y、Z坐标值[7]。并将其录入存储设备予以记录储存。从而能够精确、快速地获取高精度、实时的三维点云数据。
1.2 激光雷达技术特点
1)非接触主动式工作。地面激光雷达在获取点云数据时不需与测量对象发生直接接触,便可快速获取真实准确的目标物点云数据[8],可以很好地解决不宜接触目标的测量与数据上的误差问题。
2)获取数据速度较快。地面激光扫描仪能在短时间内获取大量空间目标的三维数据,目前脉冲式扫描速度已经达到30万/S,相位式扫描速度已经达到96万/S[9]。这一特点给野外数据的采集带来极大方便。
3)数据信息丰富。获取的数据包含物体表面精细信息,根据点云数据密度高的特性,获得高清晰度信息。也可对表面复杂的物体进行测量,最终实现对目标物体的精细化测量。
1.3 LIDAR应用领域
近年来,激光雷达技术已成功运用到各领域,如测量、林业调查、数字建设、工程设计、农业、矿业、交通、城市规划和城市三维建模、灾害监测和遗产记录等领域。
1)测量方面中的应用。在基础测绘工作中,激光雷达可以获取高密度、高精度的点云数据,以记录被测物体的表面三维信息,通过数据加工和处理,以获取高精度的DEM产品。相较于传统的测绘技术手段具有显著的优势。
2)林业调查中的应用。在林业调查工作中,使用激光雷达采集的三维点云数据同航拍影像的结合,可以提取更多树木信息,也用于森林区域水平的重建。
3)在数字建设方面的应用。通过激光雷达对地面建筑物进行多角度的扫描,可以快速获取城市中各类建筑物的三维点云数据[4]。借助三维点云数据具有高精度、真三维、可测量等特点,进行数字城市的建设,以此创建的三维模型具有更逼真的效果和更精准的尺寸比例。
4)在农业方面的应用。利用自动化三维激光扫描系统鉴定分析作物表型,具有巨大的潜在优势,这样可以大幅度降低人力投入,能够节约大量的人力和时间,并大大增加试验数据的客观性。
2 地面激光雷达在地籍测量中的应用
地籍是为土地税收、土地产权保护、利用规划及日常管理等方面顺利进行的服务基础[10]。从新中国成立以来,中国地籍工作就受到了国家的高度重视。20世纪80年代改革开放以来,中国地籍工作得到快速发展。在此期间,国家也先后出台并完善了地籍的一些相关政策及地籍调查的技术规范、规程、规定和数据库建设标准,并且统一了地籍测绘成图结果的数据标准。
地籍测绘是地籍调查过程中最核心的部分,是以权属调查为依据,进行获取和表达地籍信息所进行的一项测绘工作。地籍测量成果是土地登记的依据[11]。地籍测绘的核心内容是房屋界址点的确定与测定宗地面积与边界。
地籍测量发展到今天,经历了多次技术革新。地籍测绘的方法从最传统的配合测量仪器(如皮尺、经纬仪等)用纸、图进行记录完成野外调查这一方法,发展到航空摄影立体测量。尽管航空摄影立体测量在地籍测绘上有较为明显的优势,但由于地籍调查工作对地籍界址点精度要求较高,航空摄影立体测量很难从立体像上直接获取界址点坐标等,这给测图增加了很大的工作量。而近年来,国内所开展的地籍测量工作大多是全国性的测绘任务,并且地籍数据具有法律效力,对数据精度要求高,同步变更需及时。地面激光雷达点云数据具有现势性较强、扫描对象完整、测量范围容易控制等众多特点,作为主要数据源进行地籍调查具有巨大优势。因此将地面激光雷达应用在地籍调查中,可大大缩小地籍调查的周期性。随着高科技术的快速发展,激光雷达高新技术在摄影测量领域应用广泛。目前,激光雷达技术是测绘领域众多测绘方法中最全面、最精确的技术手段。
2.1 地面激光雷达系统数据采集与处理
2.1.1 前期准备 ①测区资料搜集。测区资料主要包括测区的航拍或卫星影像及地形图等。同时需很好地了解当地气候气象信息,调查测区内的道路分布以及地表地物分布状况,从而确定测站点的架设方式。②扫描线路初期设计。初步设计测区的扫描线路,线路的设计主要依据测区覆盖完整、测站点分布均匀、测量站移动站便捷且路径不重复等规则选择合适位置布设测站点、标靶及控制点。并将设定好的扫描路线以及站点分布标识于地形图或遥感影像图上,实地踏勘检查站点设置以及线路的设定是否合理高效。③测区实地踏勘。工作开始前,根据测区的道路状况进行实地踏勘,实地踏勘是极为关键的一个环节。通过在测区内进行实地探访,根据测区的道路状况对扫描线路进行修正,根据地物的分布疏密以及重要性扫描对象的位置合理规划扫描站点的分布。
2.1.2 规划作业方案 根据项目要求对扫描作业制定方案,基于实地踏勘的情况,对初期设定的扫描线路进行调整与修改,实现在符合作业规则的前提下合理分布站点,根据地物的分布情况确定扫描模式。并依据预定的站点数以及扫描模式估计工作量。在完成以上工作之后,开始依据方案开展数据采集作业。
2.1.3 外业数据采集 ①检查数据获取设备。数据采集之前,首先需要试运行整个系统,检查数据获取与数据存储是否正常,标靶数量是否匹配、检查点云数据和二维影像是否能准确匹配等。②数据获取。根据规划作业方案,采用“基站点+测站点”的方法,进行转扫测量。即通过在已知控制点上架设三维激光扫描仪为基站点,同时在与另一测站点相互通视的已知控制点上架设标靶(记为标靶点),根据测量物体的特征,对三维激光扫描仪按一定的参数进行设置后采集被测物体点云数据;在点云数据中找到标靶点的位置并对标靶进行精细扫描,最终获得后视点标靶的相对坐标[12]。③数据质量检查。对当日扫描数据备份存储之后,进行粗拼接检验,通过对全局数据拼合效果的检查,确定测区内关键地物是否覆盖完全,是否有漏测空洞,点云密度是否符合后期处理需求等。通过检查,对点云数据获取不理想的区域,通过调整局部扫描精度重新扫描,直到符合标準再进行下一个区域的扫描测量。④数据补测。对于质量不达标的测量数据,需要进行加站补测作业。补测主要针对数据点密度不足以反映被测物体所关注的细节以及存在数据空洞的情况分别在原来站点处进行加密扫描与寻找区域内的制高点进行补站测量。
2.2 地面激光雷达数据内业处理流程
内业数据处理是对外业数据采集的所有数据进行处理,主要内容包括点云数据拼接及坐标转换、地籍要素绘制、图廓整饰、数据检验及精度验证等。
1)坐标系转换。由于地面激光雷达数据的采集过程是单站逐个扫描的形式,每一测站获取的点云数据均有独立的扫描仪坐标系(SOCS),为了得到完整的目标数据,必须将每一个测站的点云转换到同一个坐标系统之内[13]。在数据采集完成之后,在点云工作站中需要进行工程级别的单站数据之间的拼接处理,将整个的扫描区域归一到统一的坐标系统之下,即工程坐标系(PRCS)。经过拼接之后,工程坐标系下的所有单站之间具有准确的相对位置关系,通过全局配准将所有的三维坐标点转换到地理坐标系下,即全局坐标系(GLCS),以便准确实现实景照片和点云数据的匹配。
2)数据拼接。点云拼接的过程主要包括两个环节,首先进行手动粗拼接,在要进行拼接处理的相邻两站点之间,通过手动寻找同名点对来解算转换矩阵SOP,获得一个较好的初始相对位置。然后在此基础上,通过迭代最近点算法(Iterate Closest Points)进行自动精确拼接,从而达到不同站点之间的点云的精细拼合。
3)地籍要素绘制。首先根据点云三维显示的俯视投影图,勾勒出研究区各线状地物的轮廓。采取人机交互的操作,在南方CASS软件中进行地籍要素的提取、属性编辑和修饰等地籍要素矢量数据。
4)图廓整饰。通过选择不同的视图模式来判断界址点和边界的位置信息,用点云工作站的测图模块提取界址点。最终完成在点云数据基础上的地籍图的绘制。
3 实际应用
基于中国正在开展的全国地籍调查项目的实施,本研究选择以新疆伊犁地区霍城县为试验区进行地籍调查,该试验区能够很好地反映出中国西北地区农村居住特点。研究区地处伊犁河谷的开阔地带,农村居住房屋建筑具有时间较长、宅基地较为集中,建筑物不规则等特点。利用地面激光雷达技术对该地区进行地籍测量,快速获取被测物体的空间三维坐标数据及各地籍要素,并同步拍摄实景照片,真实再现所测对象的三维立体景观[14],通过照片信息获取建筑结构、街道名等信息,为地籍图的绘制做准备。
首先根据规划方案扫描研究区,获得被测区的三维点云数据图(图1),可以清晰地看出房屋的边界、农用地、道路等要素,并且通过不同角度的旋转清楚的确定房屋脚点以及界址点、特征线等。
扫描工作结束后,内业人员通过人机交互的作业方式,将点云导入点云工作站中,根据点云三维显示的投影图(图2),依据地籍测绘规范在南方CASS软件中进行矢量数据的提取,得到地籍要素的矢量数据并进行属性编辑和修饰等(图3)。通过选择不同的视图模式来判断界址点和边界的位置信息,用点云工作站的测图模块提取界址点。最终完成在点云数据基础上的地籍图的绘制。
在地籍要素获取过程中,对复杂地段隐蔽的界址点,提取困难以及有部分激光雷达无法采集到的区域,将在后期使用GPS-RTK或全站仪测量方式进行人工实地补测。最终综合激光雷达获取的数据与补测数据共同完成地籍成图。
4 试验结果评估与精度验证
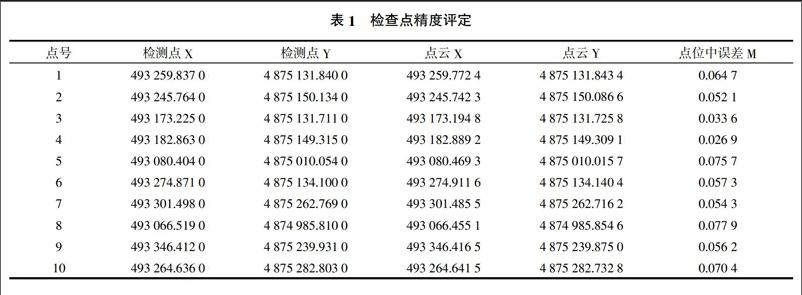
在完成全测区的测量成图之后,利用全站仪进行了点位的核查,显示RTK检测点与点云检测点(图4),将全站仪精确测量的点位与地面激光雷达获取的对应点的坐标进行精度的检查和对比,采用解析法根据坐标得到点位中误差(表1)。
《地籍调查规程》表明,地籍测量的允许限差在15 cm以内。从统计结果可以得到,在点位的实际检查过程中选取的部分数据精度误差完全符合《地籍调查规程》解析界址点的精度要求。试验证明,地面激光雷达测量系统点云的精度能够满足地籍测量的测图精度。采用地面激光雷达测量系统进行地籍测量这一方法是可行的。
5 展望
通过使用地面激光雷达系统作业方式,对新疆伊犁某农村进行试验。经过解算得出精确的数据信息,并在点云的基础上完成界址点选取、界址线界定及宗地边界的提取等工作。分析可知,激光雷达技术具有明显的优势,能够快速获取地籍测量所需的信息,实现多种数据同时入库。通过验证采用激光雷达进行地籍测量这一方法具有很高的可行性。
激光雷达技术作为一种新型的测量技术,可以快速获取全面的空间三维信息,为常规传统的测量带来了新的突破。至目前为止,国内所进行的地籍测绘工作都是在二维地籍的基础上开展的,但随着城市的快速发展和土地的集约、节约利用,迫使其向立体化方面发展[15]。三维地籍必将成为今后地籍管理工作的发展方向。根据激光雷达目前的发展趋势来看,激光雷达技术必将在地籍测绘领域发挥越来越重要的作用。
参考文献:
[1] 郑 培.地籍测量与现代测绘新技术的精度控制[J].硅谷,2013(2):20-21.
[2] 叶 松,曹 波,张 煜.机载激光雷达技术及其在土地调查中的应用[J].测绘通报,2010(3):68-71.
[3] 刘慎栋.浅谈新技术在地籍测绘中的应用[J].价值工程,2011(19):164.
[4] 张 婷.土地测绘信息化技术在土地开发管理中的应用[J].科技创新与应用,2014(14):132.
[5] 张新磊.基于地面型三维激光扫描系统的场景重建及相关应用[D].贵阳:贵州大学,2009.
[6] 邱贞生.三维激光扫描技术在矿山采空区测绘中的应用[J].福建地质,2012(1):90-94.
[7] 王汉顺.三维激光扫描技术在公路边坡监测中的应用[J].科技与企业,2013(5):111.
[8] 李恒星.激光雷達点云特征分析与数据分割[D].西安:西安电子科技大学,2014.
[9] 戴升山,李田凤.地面三维激光扫描技术的发展与应用前景[J].现代测绘,2009(4):11-12,15.
[10] 刘剑飞.城乡地籍数据集成技术研究[D].南京:南京师范大学,2008.
[11] 张攀科,裴 亮,王留召,等.车载激光扫描系统在地籍测量中的应用[J].测绘科学,2015(9):163-166.
[12] 李 震,刘红星.三维激光扫描仪在城市记忆工程的应用研究[J].河南水利与南水北调,2015(6):58-60.
[13] 代世威.地面三维激光点云数据质量分析与评价[D].西安:长安大学,2013.
[14] 陶茂枕.基于BP神经网络的三维激光扫描点云数据的滤波方法研究[D].西安:长安大学,2014.
[15] 房延伟.三维激光扫描技术在地籍测绘中的应用[D].长春:吉林大学,2013.
猜你喜欢
北京测绘(2022年5期)2022-11-22
汽车观察(2021年8期)2021-09-01
资源信息与工程(2020年3期)2020-07-09
浙江国土资源(2019年10期)2019-10-31
中国交通信息化(2019年1期)2019-03-26
电子制作(2018年16期)2018-09-26
地理空间信息(2018年8期)2018-08-29
中国公共安全(2017年7期)2017-10-13
电子制作(2017年9期)2017-04-17
城市建设理论研究(2014年11期)2014-04-21
