基于Pro/E的扭矩扳手仿真
2017-08-30 00:17西安思源学院工学院谭栓斌
电子世界 2017年15期
西安思源学院工学院 谭栓斌
陕西众拓科技发展有限公司 朱智民
西安思源学院工学院 胥云博
基于Pro/E的扭矩扳手仿真
西安思源学院工学院 谭栓斌
陕西众拓科技发展有限公司 朱智民
西安思源学院工学院 胥云博
本文以汽车常用扭矩扳手为例,详细测绘该扭矩扳手的各个零件。在此基础上,使用三维软件Pro/E构建其装配图,并且分析其运动状态和受力情况。结果表明:当弹簧压缩为1mm时,所对应的设定力矩为0.53 N·m。当扳手头部施加0.53 N·m的力矩时,扭矩扳手会碰撞套筒,并且联接杆受力明显减小,方向接近于水平。
扭矩扳手;仿真;扭矩值
一、引言
扭矩扳手广泛用于对拧紧工艺有严格要求的装配线,比如汽车发动机的装配线。使用扭矩扳手可以使各个紧固件扭矩值达到合理的设计值,从而保障产品的均匀性和可靠性。按照使用动力的区别,扭矩扳手一般分为手动、气动和电动扭矩扳手。其中,手动机械音响扭矩扳手因为价格便宜,扭矩调整方便,扭矩精度可以控制,所以仍然是市场的主力产品。
在实际工作中,为了保证紧固件扭矩值的一致性,常常要求扭矩扳手设定的扭矩值具有稳定性,因此对于扭矩扳手的质量有严格的要求。与日本、德国等发达国家的扭矩扳手相比较,我国制造的扭矩扳手不管是扭矩值的设定,扭矩值的稳定性方面都还有较大的差距。本文以某著名厂家的扭矩扳手(扭矩值小于50N·m)为例,详细测绘该扭矩扳手的各个零件。在此基础上,使用三维软件Pro/ E构建其装配图,并且分析其运动状态和受力情况。
二、建模
详细测绘该扭矩扳手的各个零部件,应用Pro/E软件进行装配,图1为装配效果图。爆炸展开后见图2所示。从总体上来说,该扭矩扳手可以分为三部分,分别为头部,中部和尾部。
头部的主要作用是连接紧固件和扭矩扳手,并且按照需要使得扳手可以进行顺时针和逆时针进行旋转。完成这些功能主要依靠零件10、9和2。一方面,零件10的方头可以连接紧固件,另外一方面,当拨动控制杆2时,零件9的左或者右便和零件10的齿轮部分紧密配合,这种情况下扭矩扳手只能进行顺时针或者逆时针单向转动施加扭矩,反向不能施加任何扭矩。这样可以让扭矩扳手在进行零件的拆卸或组装时,可以连续不断的转动,不用脱离紧固件。从而大大提高了工作效率。
尾部的主要作用是扭矩值的设置,这部分功能主要依靠零件21、26和27等来完成。旋转扭矩调整环26,在扭矩调整螺母22等零件的作用下,压缩弹簧21,当扭矩值到达所设定的值时,通过锁定螺钉27进行扭矩值的锁定,以防止在工作过程中扭矩值的变化。
中部为一脱开机构,这部分功能主要依靠零件3、5、16和19等来完成。当扭矩扳手不工作时,在零件21弹簧的作用下,零件3的斜面紧贴零件19的斜面部分;当旋转扭矩扳手进行工作时,扭矩到达所设定的扭矩值时,零件3绕着零件14的轴进行旋转,此时零件16便开始转动,零件16转动的结果使得零件19向右运动进一步压缩弹簧。此部分为扭矩扳手的核心之一,在零件16的作用下,零件19向右运动,表面看起来零件19越向右运动,弹簧对其的作用力便越大,似乎零件19不可能继续向右运动,但是,随着零件19向右运动,零件16对零件19的作用力矩却在增大,增大的主要原因是随着零件16的旋转,零件3通过零件16对零件19的作用力臂在不断增大。正是这一原因,只要一达到所设定的扭矩值,零件3便绕着零件14进行旋转,直到零件3右端的突出部分碰到零件17而发出清脆的"卡塔"声,提示操作者扭矩值已达到设定值,不应该继续加力。
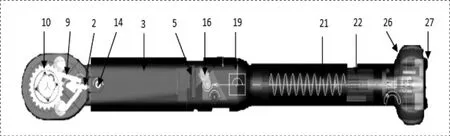
Figure 1. Model of torque wrench图1扭矩扳手Pro/E建模图
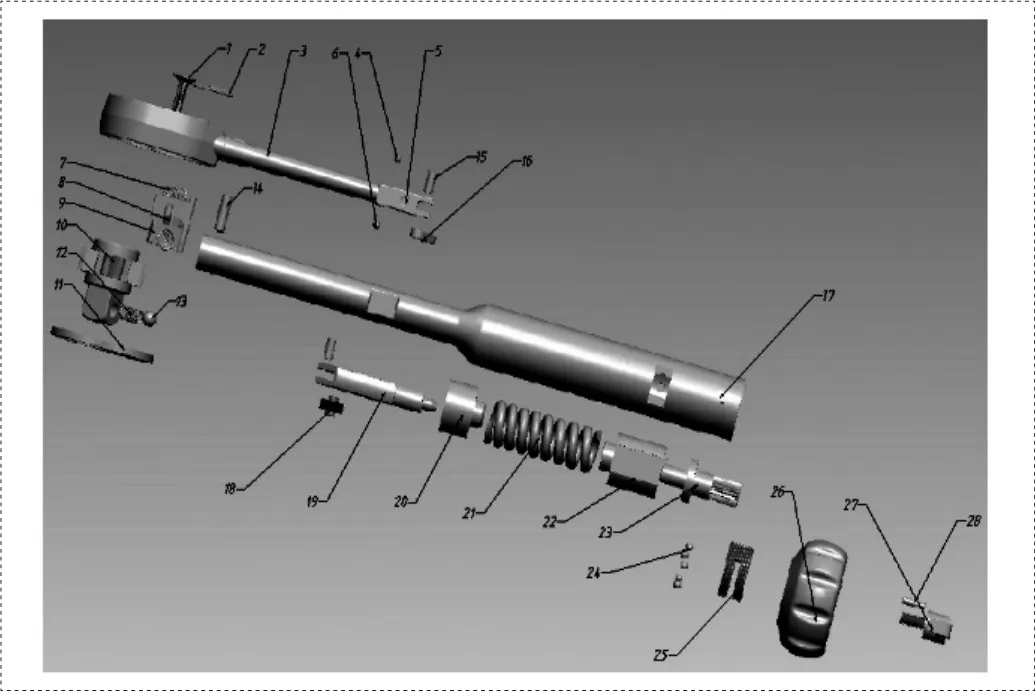
Figure 2. Exploded fi gure of torque wrench图2 扭力扳手爆炸图
三、仿真
为了说明问题的方便,扭矩扳手可以用如图3所示的简化方式进行表示。当设置好一扭矩值的时候,主弹簧处于压缩状态。如果扭矩扳手开始旋转拧紧螺钉,如图4所示,相当于在扳手头部施加一个力矩,在这一力矩的作用下,扳手杆围绕支撑部分进行旋转,同时导致连接板的旋转运动,随着连接板的旋转,连接板推动滑块向右运动,并且压缩弹簧。当位于扳手杆右部的突出部分碰撞扭矩扳手套管的外壁,发出清脆的"卡塔"声,扳手杆、连接板不再旋转,滑块不再向右运动,弹簧不再进一步受到压缩,其运动状态如图5所示。
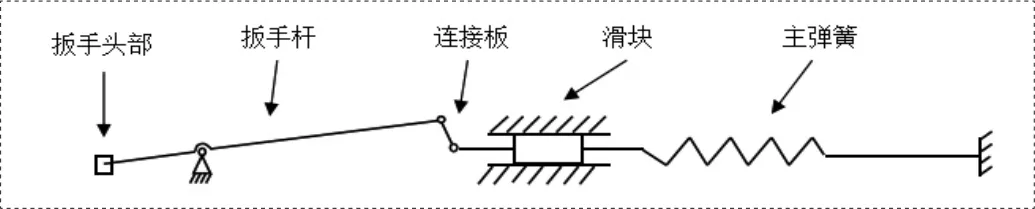
Figure 3. Kinematic sketch of torque wrench图3 扭矩扳手运动传递简图

Figure 4. Initial working sketch of torque wrench图4 设定好扭矩值的扭矩扳手开始工作示意图

Figure 5. Final working sketch of torque wrench图5 达到设定扭矩值时扭矩扳手状态图
按照以上的分析,在Pro/E进行仿真的时候,主要设定如图4所示的4个销钉连接,销钉连接在仿真进行的时候只有一个旋转的自由度;1个滑块连接,所设定滑块连接在图4所示的状态只有左右平移的一个自由度。选定弹簧的基本参数为F=K(u-x),其中K值设定为5N/mm,弹簧的自由长度为50mm,设定好扭矩值,对应的弹簧长度为49mm。
四、结果分析
按照以上设定的初始条件在机构分析模块中对扭矩扳手进行静态分析。Pro/E的静态分析主要研究机构中主体平衡时的受力状态,由于不考虑速度和惯性,这种机构分析模式比动态分析可以更快的找到平衡状态。
进行机构仿真分析的时候,在图3所示的扳手头部施加一系列力矩,观察连接板的运动状态。结果显示:当施加力矩小于0.53 N·m的时候,扭矩扳手处于图4所描述的状态;当施加力矩等于0.53 N·m的时候,扭矩扳手的连接板发生旋转,并且会达到图5所示的状态;施加力矩不存在大于0.53 N·m的时候,因为只要施加力矩等于0.53 N·m,扭矩扳手就会发出清脆的"卡塔"声,提醒操作者已经到达所设定的扭矩。通过以上的分析,可以明显的看出,弹簧由50mm压缩到49mm,所对应的扭矩扳手扭矩值为0.53 N·m。
Pro/E的静态分析的结果显示,当在扭矩扳手头部施加5291N·mm(0.53 N·m)的力矩时,扳手开始工作时候主要元件的受力图见图6所示。图中左边的箭头表示支撑部分对于扳手杆作用力的方向和大小,力的大小约为66N。图中右边的两个大小相等,方向相反的箭头表示扳手杆和滑块对连接板作用力的大小和方向,力的大小约为73N。同时,弹簧被压缩1mm,弹簧所受的压缩力约为5.4N。

Figure 6. Initial force diagram of torque wrench applied torque of 0.53 N·m图6 施加力矩为0.53 N·m扳手开始运动瞬间受力图

Figure 7. Final force diagram of torque wrench applied torque of 0.53 N·m图7 施加力矩为0.53 N·m扳手受力平衡受力图
当在扭矩扳手头部施加5291N·mm(0.53 N·m)的力矩时,扳手处于平衡时候主要元件的受力图见图7所示。图中左边的箭头表示支撑部分对于扳手杆作用力的方向和大小,力的大小约为101N,相比较与上图,力的方向变化较小,力的大小从66N增加到101N,增加很明显。图中右边的两个大小相等,方向相反的箭头表示扳手杆和滑块对连接板作用力的大小和方向,力的大小约为25N,相比较与上图,力的大小和方向变化都非常明显,力的大小从73N减小到25N,力的方向从接近铅锤方向变化为接近水平方向。在以上分析的力中间,还存在一个大小为94.6N的力,这是由于扳手杆运动到碰撞套管,套管对扳手杆有一接近向上的作用力。同时,弹簧被压缩5mm,弹簧所受的压缩力约为24.7N,增加很明显。
五、结论
a) 利用Pro/E清楚的再现了扭矩扳手的结构和运动。
b) 当弹簧压缩为1mm时,所对应的设定力矩为0.53 N·m。
c) 当扳手头部施加0.53 N·m的力矩时,扭矩扳手会碰撞套筒,并且连接杆受力明显减小,方向接近于水平。
[1]祝凌云,李斌编. Pro/Engineer运动仿真和有限元分析[M].北京:人民邮电出版社,2004.
谭栓斌(1970-),男,高级工程师,研究方向为材料成型和模具设计。
陕西省教育厅自然科学基金(12JK1069)
猜你喜欢
凿岩机械气动工具(2017年3期)2017-11-22
军营文化天地(2017年7期)2017-09-25
军事文摘·科学少年(2016年8期)2016-11-02
军事文摘(2016年16期)2016-09-13
中学生数理化·高三版(2016年2期)2016-09-10
中学生数理化·高二版(2016年6期)2016-05-14
中国塑料(2015年9期)2015-10-14
河南科技(2015年2期)2015-02-27
中国卫生(2014年5期)2014-11-10
河南科技(2014年3期)2014-02-27