基于SX—815Q装置机器人单元工作任务的研究
2017-09-05 14:24赵丽
山东工业技术 2017年15期
赵丽
摘 要:根据SX-815Q由MPS模块化生产线设备中的六轴工业机器人单元控制要求研究教学中的怎样拆分该单元的工作任务,及任务中的教学实施核心专业知识,达到该设备在教学中的充分利用。
关键词:六轴工业机器人;控制要求;工作任务;程序编写;参数设置
DOI:10.16640/j.cnki.37-1222/t.2017.15.024
SX-815Q由MPS模块化生产线设备组成,共分为颗粒上料、加盖拧盖、检测分拣、6轴机器人和成品入仓五个基本工作单元和几个扩展单元组成,工作单元由工业机器人、PLC、特殊功能模块、变频器、伺服驱动、步进驱动、气动元件、触摸屏等工业控制器件构成。以下就是笔者对六轴机器人单元工作任务研究的内容:
1 六轴工业机器人单元控制要求
六轴工业机器人单元。其控制要求是:
(1)“单机”工作状态下按“启动”按钮,或者“联机”状态下,主站给出“启动”信号后,系统进入运行状态,“启动”指示灯亮,档料气缸伸出,同时推料气缸A将物料盒推出到装箱台上;机器人开始从检测分拣单元的出料位将物料瓶搬运到物料盒中;物料盒中装满4个瓶子后,机器人再用吸盘将物料盒盖吸取并盖到物料盒上;6轴机器人最后根据装入物料盒内4个物料瓶盖颜色的顺序,依次将与物料瓶盖颜色相同的标签贴到盒盖的标签位上。
(2)在“单机”工作状态下按“停止”按钮,或者“联机”状态下主站给出“停止”信号,“停止”指示灯亮,系统进入停止状态,机器人停止搬运,其它所有机构均停止动作,保持状态不变。
(3)在“单机”工作状态下按“复位”按钮,或者“联机”状态下主站给出“复位”信号,“复位”指示灯亮,系统进入复位状态,机器人复位,其它执行机构均恢复到初始位置。
(4)初始位置要求:机器人处于安全位置;加盖定位气缸缩回;A、B推料气缸缩回;升降机构A处于第一个盒子出盖高度;升降机构B处于第一个盖子出盖高度。
2 六轴工业机器人单元工作任务
根据控制要求经理论分析得到了实训的工作任务是:
任务一:六轴工业机器人单元安装与接线。
RV-2SD型工业机器人是一款额定负载2公斤的,小型6自由度工业机器人,它由机器人本体,控制器,示教器等组成。
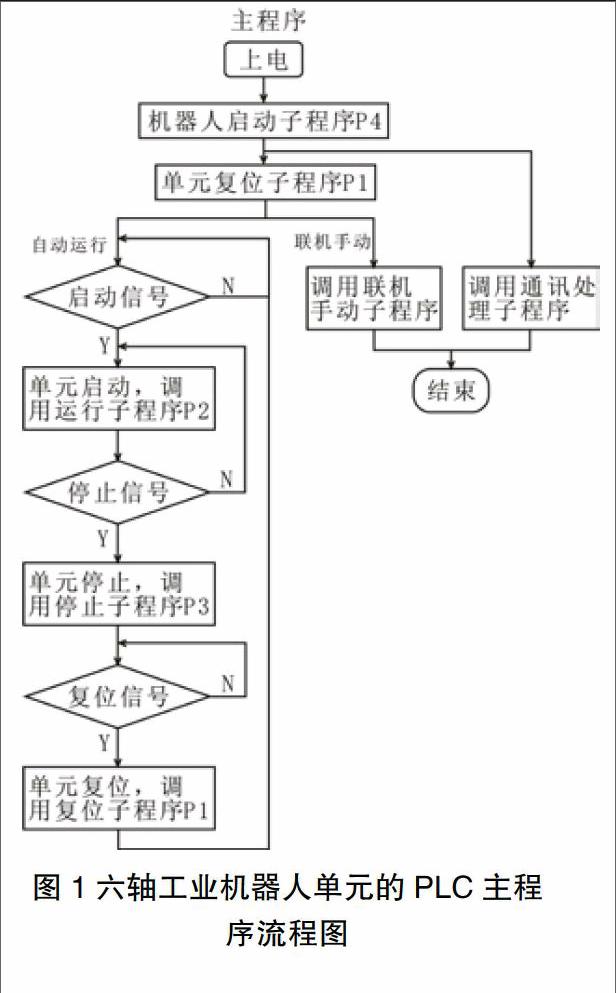
任务二:六轴工业机器人单元的PLC程序设计;
根据六轴工业机器人单元控制要求编写PLC主程序流程图如图1所示,之后根据主程序流程图编写PLC的控制程序。
任务三:六轴工业机器人的程序编写与参数设置
2.1 程序编写
根据控制要求编写机器人程序,再输入到机器人专用编程软件RT TOOLBOX2里再把程序下载到控制器里,就完成了程序编写的任务。
2.2 参数设置
2.2.1 三菱6轴机器人原点数据输入。
(1)在“在线”的模式下,点击“在线”,再“维护”,然后双击“原点数据”, 再点击“原点数据输入方式(R)”,
(2)根据机器人自带的原点数据填写原点数据,
(3)填写完成之后,再点击“写入”(每台机器人的原点数据不同,根据机器人自带的I/O数据设定)。
2.2.2 三菱6轴机器人专用I/O的编辑
(1)在“在线”的模式下,點击“在线”,再点击“参数”,然后点击“专用输入输出信号分配”前面的“+”。
(2)双击“通用1”,设定通用I/O,编辑完成之后点击“写入”。
(3)完成之后机器人自动重启,通用I/O设置完成。
2.3 三菱6轴机器人点示教
(1)将机器人控制器的MODE拨到“MANUAL”手动控制档。
(2)按下示教盒的“ENABLE”键,这时“ENABLE”会发出黄光,
(3)再按一下“EXE”键进入“程序管理”界面,
(4)点击“F2”进入到“点位置”界面。若更该其他点,请点击“F3”或 “F4”来选择。
(5)点击“JOG”按键,进入到手动控制画面,说明:可以通过“F1”键切换换到“关节”模式。
(6)在一直按住示教盒背面的使能键情况下,点击“SERVO”
键。说明:示教盒的使能键,有三个开关位置为“0-1-0”,只有当为“1”的情况下,使能键是有效的,在默认的情况下为“0”;当轻按时候,会发出一个轻“啦”的声音,此时为“1” 使能键有效;当再用力按的时候,会发出一个比较大的“啦”声音,此时为“0” 使能键无效。
当伺服电源的指示灯亮的时候,在手动界面中按“+X”、“-X”、“+Y”、“-Y”、“+Z”、“-Z”、“+A”、“-A”、“+B”、“-B”、“+C”、“-C”使机器人移动到自己所需要的位置。
(7)当完成移动机器人到所需要的位置时,点击“JOG”退出手动控制模式;回到“点位置”界面。
(8)点击“F2”进行点示教,再点击“F1”,这样P1点就示教成功。
任务四:六轴工业机器人单元的调试与运行。
调试的过程主要是看机器人控制器和PLC能否实现配合运行,其中机器人控制器的输出是接在PLC的输入端,PLC的输出是接在机器人控制器输出端,来实现互相配合运行的。
以上就是我的对业机器人单元工作任务的分析和研究,通过分析和研究能更好的应用到教学当中去。
参考文献:
[1]ModularProduetionsystemHandbook,FESTO公司,1997(10).
[2]袁培根.基于嵌入式控制的门禁系统的设计与研究[J].实验室研究与探索,2001,20(05):62-64.
[3]王治文.面向开放管理的实验室门禁系统[J].实验室研究与探索,2009,28(06):60-63.
猜你喜欢
智能建筑与工程机械(2019年1期)2019-09-10
艺术与设计·理论(2016年4期)2017-01-16
考试周刊(2016年10期)2017-01-12
电脑知识与技术(2016年22期)2016-10-31
筑路机械与施工机械化(2016年6期)2016-07-16
现代经济信息(2016年13期)2016-06-17
成才之路(2016年10期)2016-05-07
考试周刊(2016年1期)2016-03-11
科技与创新(2015年23期)2015-12-08
农业科技与装备(2014年11期)2015-02-02