关于一种通过高精度雷达等设备遥测航标位置的方法
2017-09-13 09:37陈华常帅
珠江水运 2017年15期
陈华+常帅
摘 要:本论文探讨一种遥测航标位置的方法:对于航标巡检作业,航标作业人员通过在船上安装的高精度GPS、电罗经、雷达,获取船舶的位置、船首向、航标相对船首向的方位、距离等数据,计算得出目标航标的位置,并探讨该方法的可行性。
关键词:航标 雷达 遥测 位置
1.航标位置的重要性
航标的一个基本功能是定位;航标四要素包括标位准确、灯质正常、涂色鲜明、结构良好,首当其冲的是航标位置的准确性。因此,航标位置的重要性不言而喻,如何便捷并精确地测量出航标的位置,是航标维护作业重要任务之一。
2.工作原理
本论文探讨一种遥测航标位置的方法:航标遥测定位作业时,通过在航标作业船上安装高精度雷达、GPS、电罗经,作业船在水域里航行,GPS获取船舶位置;电罗经获得船舶的船首向;雷达精确的扫描出目标范围内航标相对船舶的方位、距离。所得数据通过计算,得出目标航标的位置,从而达到一种遥测航标位置的效果,该遥测系统结构示意图如图1,遥测原理见图2。
(1)通过船载GPS获取船舶位置0(x0,y0)。
(2)通过电罗经获取船舶的船首向β;通过雷达获取航标相对船首向的方位γ:雷达的工作原理是,雷达发射出信号,信号撞击到目标反射回来,并由雷达接收,根据雷达接收到回波信号的时间点来判断出航标相对船首向的方位γ。航标相对船舶的真方位α=船首向β+航标相对船首向的方位γ。
(3)通过雷达获取距离r。雷达信号撞击到目标反射回来,并由雷达接收,根据雷达发出距离接收到回波信号的时长来计算出航标相对船舶的距离r。
(4)计算出目标航标位置P(x,y)航标离船舶距离不远,不用考虑地球的球面弧度,因此可以把以上的几个点当作在一个平面上,P(x,y)的计算公式为: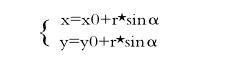
3.遥测产生的误差
设测量到位置P(x,y)与航标实际所在位置P(x,y)为之间的误差为Δx,计算过程如下:
(1)设GPS的误差为Δy,精度高的船载GPS的误差可在1m以内,因此Δy≤1m。

(2)设测量产生的方位误差为Δα,方位误差包括电罗经、雷达产生的误差。对于电罗经,精度高电罗经的精度可达0.1°;雷达的水平方向上对方位的探测精度与天线的宽度有关,宽度越宽,精度越高,以HALO-6固态雷达为例,据其产品参数,其精度最高可达0.8°。因此方位误差Δα≤0.1°+0.8°=0.9°。
(3)对于雷达测距误差:《海上导航和无线电通信设备和系统.不与IMO SOLAS第V章相符的船用雷达.性能要求、试验方法和要求的试验结果》第3.4.3章节中对雷达设备的要求是:“固定的距离圈和可变距离标记应能使目标距离得到测量,其误差不超过试用的量程最大的1%或30m”。本论文的当近距离使用时,按照不超过1%理解。因此,雷达的测距误差|Δr|≤|r-r|=0.01r。
(4)计算出遥测误差
《水运工程导标设计规范》中提到:“在比较宽阔的水域……所取航道宽度过大,将失去设置导标意义。因此,本规范规定航道宽度大于450m时,取450m。”对于宽450m航道两侧的航标,航标放置在航道的边坡上,船舶在航道中航行,船舶距离航标的位置最远大致可为450m。对于其它水域的航标,航标作业时,距离都不会太远,因此也可以450m为最大距离来计算误差。将450m代入公式,Δz=r*Δα≤8.3m,Δx=Δy+Δz≤9.3m。实际作业中,作业距离会远低于450m,当作业船距航标100m时,定位误差Δx≤2.86m。
4.可行性研究
(1)与现行巡检方式的误差比较。用现行巡检方式对航标进行巡检,航标作业船需靠停航标,当遇到下雨等恶劣天气时,需以船载GPS的位置作为目标航标的位置。船载GPS安置在驾驶室顶上,对于小型航标作业船,船载GPS与船头航标作业区的距离约8m;对于大、中型航标作业船,船载GPS与航标作业区的距离会更大,可达15m左右。这些误差对应本论文中的误差是Δz。因为Δz≤8.3m,所以本论文中遥测定位的精度优于现行的利用船载GPS定位的精度。
(2)雷达对航标的识别能力。现在的一些高端雷达,如一些固态雷达,分辨率很高,可以识别远处较小的物体,包括小型浮体。
(3)雷达的探测距离。一些雷达如HALO-6固態雷达, 当雷达安装高低度为4米时,其短程探测距离可达6m;探测没有雷达反射器的3米高航标,HALO-6固态雷达的最大探测距离能达3海里左右。因此对于遥测航标位置作业,已经能满足航标作业需求。
综上所述,本论文探讨的通过高精度雷达等设备遥测航标位置的方法是可行的,与现行巡检方式对比如表1。
5.应用场景
(1)当遇水深太浅,或有船舶锚泊在航标附近,或天气不好时,航标作业船不方便靠停航标,雷达能在其作业范围内对航标进行定位。
(2)需要短时间测量多个航标位置时,如海区航标大检查时,该方法能快速的测量出所经航道的航标位置。
(3)用航标作业船执行非巡检任务,如归航时,该方法可以顺道遥测所经航道的航标位置,从而达到加大巡检频次,节约经费的效果。
(4)夜巡时,航标作业船靠停航标会比较危险,可通过该方法进行对航标进行巡检。
6.前景
(1)航标位置现行方式都是以经纬度来表示的,对于遥测的目标航标,可通过相应的处理,以2000国家大地坐标系的经纬度的方式显示出位置信息。
(2)结合电子海图进行航标标会:对雷达遥测的航标通过显示器在电子海图上显示出来,同时在电子海图中录入航标的原始位置数据信息,电脑通过对比两者的位置信息,自动得出航标有没有移位,向哪个方向移位多少米。
参考文献:
[1]IEC 62252-2004.海上导航和无线电通信设备和系统.不与IMO SOLAS第V章相符的船用雷达.性能要求、试验方法和要求的试验结果.
[2]JTJ 237-1994.水运工程导标设计规范.
[3]陈华.浅析一种提高浮标定位精度的方法.珠江水运.2016,06:79-80.endprint
猜你喜欢
工友(2023年4期)2023-04-21
电子制作(2019年11期)2019-07-04
电子测试(2018年13期)2018-09-26
现代工业经济和信息化(2016年6期)2016-05-17
世界海运(2014年5期)2014-03-06
河南科技(2014年16期)2014-02-27