
适应高原天气与地形的人工增雨无人机研制及试验
2017-09-15 06:17马学谦孙安平张小军韩辉邦
农业工程学报 2017年15期
马学谦,孙安平,张小军,韩辉邦
·农业航空工程·
适应高原天气与地形的人工增雨无人机研制及试验
马学谦1,孙安平2,张小军1,韩辉邦1
(1. 青海省人工影响天气办公室,西宁 810001; 2. 青海省气象局,西宁 810001)
人工增雨作业是开发空中云水资源的有效手段,常规作业方式因安全性和空域因素受到一定的限制,研制一种适合高原天气、复杂地形和气候特征的长航程、大载荷等功能于一体的无人增雨飞机势在必行。该文以LY-Z200原型机为雏形,通过改变起降方式、调整发动机功率和位置、加装除冰器件,提高无人机的飞行高度和安全程度,并安装大气常规探测仪器、设计小型化的增雨播撒系统、增加航拍仪器等功能扩充无人机的使用范围,从而研制出适合高原的LY-ZY200型人工增雨无人机。经多架次试验结果表明:该无人机飞行高度达6 100 m,起飞质量达171 kg,有效载荷50 kg,加油量达42 L,最大油耗为7.2 L/h,巡航速度达187.2 km/h,巡航时间长达4 h,满足高原地区实施大范围人工增雨的任务载荷量和航程需求,并能携带10根催化烟条在−4 ℃以下低温云区实现空地信息互通、人工增雨作业和多样化的任务需求。高原人工增雨试验表明该无人机能够穿越较厚的云层和复杂的云内环境,实现平稳飞行和增雨催化剂的规划点播撒,催化后能够直观地反映出增加了地面有效降水。该无人机可以实现人工增雨中适当作业位置、适当作业时机开展适当播撒作业任务要求,为人工影响天气开辟了比较理想的作业方式和探测工具。
无人机;控制;试验;高原;增雨
马学谦,孙安平,张小军,韩辉邦. 适应高原天气与地形的人工增雨无人机研制及试验[J]. 农业工程学报,2017,33(15):105-111. doi:10.11975/j.issn.1002-6819.2017.15.013 http://www.tcsae.org
Ma Xueqian, Sun Anping, Zhang Xiaojun, Han Huibang. Development and experiment of enhancement precipitation unmanned aerial vehicle adapted to weather and topography of plateau[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(15): 105-111. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2017.15.013 http://www.tcsae.org
0 引 言
无人机比有人驾驶飞机具有研发制造成本低、操纵使用方便、使用效率高等优点,是广泛应用于生产活动、国家安全等领域的高科技产品,实际运用中显现出广阔的发展前景,具有巨大的应用潜力[1]。因用途不同对无人机性能、功能和关键技术需求差异明显,当前在信息化、网络化、体系化背景下推动了无人驾驶飞机技术突飞猛进[2]。美国是无人机技术发展的领先国家[3-4],在NASA先进概念研究机构(NASA’s institute for advanced concepts, NIAC)支持下,科研人员致力于发展一项类似于无人机探测器的概念研究[5],对无人机的研究正向智能化、长航时、大载荷等方向蓬勃发展。无人机是动力驱动、能携带和执行多种任务、可重复使用的无人驾驶飞机,因其成本低、体积相对较小、质量轻、灵活机动等特点,在航拍[6]、台风探测[7]、火情监测及灭火减灾[8]、气象要素探测[9]、农业技术开发[10-14]、农业技术应用[15-18]和无人机发展[19]等很多领域越来越广泛的适用,并促进了相关领域向高分辨率、精细、实时、准确的方向发展。
三江源地处青藏高原腹地,平均海拔高度为4 200 m,素称“中华水塔”,20世纪末至21世纪初[20],随着全球气候变化和生产规模扩大,上游和江河源头出现湿地锐减、植被衰退、土地沙化为主要特征的生态恶化趋势,引起中下游的洪涝灾害、断流等自然灾害问题。为了推动水源地、湿地、生物多样性等方面的可持续发展和人与自然的和谐相处,三江源成为国家优先建设生态安全屏障的重点地区。
开发和利用好空中云水资源[21]是解决地面淡水源不足和建设国家生态安全的重要途径,开展复杂天气条件下的人工增雨作业是有效手段,而无人机是可控和能回收的气象探测和增雨播撒的重要工具[22],是人工影响天气关键技术和装备研发的重要方向[23],因而研发一种适合高原天气特征、适应高原复杂地形和气候的能探测、可作业、可控、能回收、长航程、大载荷等[24-26]功能于一体的无人驾驶增雨飞机势在必行。近来,仿生智能[27]、感知与规避[28]等新技术的发展及应用,改善了无人机的智能化和技术性能,并应用于气溶胶探测[29]、地形云播云[30]等方面,通过利用这些技术将实现无人机在复杂的大气环境中按规划路线安全穿云探测飞行,实施科学作业[31-35],大力提升人工增雨的研究和技术开发能力,提高人工增雨效率。
高原地区山脉起伏较大,很难选择一块宽阔、平坦的区域进行无人机的自主起飞和滑降,同时,人工增雨作业在高海拔、稀薄空气、−4 ℃以下温度层中播撒飞行,这些自然条件的限制需要研制适应高原的人工增雨无人机。本文基于以上特殊需求,以LY-Z200型无人机为基础进行重新设计、改造和升级,研制适应高原的人工增雨无人机,并进行多架次的试验飞行,以满足高原地区人工增雨作业的要求。
1 技术设计
LY-Z200原型无人机采用轮式起飞和滑行降落方式,其发动机后置、无除冰和气象探测装置、飞行高度仅4 500 m、无增雨播云和航拍功能、载荷50 kg。为适应高原飞行和人工增雨的特殊需求,对原机动力系统、起降方式、航空电子系统、增雨播云装置以及测控系统进行了技术设计、改造和试制。
为了适应高海拔稀薄空气条件下无人机飞行,首先需要提高最大飞行高度,才能满足无人机能够深入−4 ℃以下的云中开展催化播撒,取得最佳的增雨效果。在高原地区大气层结达到−4 ℃以下的平均海拔高度为6 500 m左右,因而无人机的最大飞行高度应从原型机的4 500 m提升到适合高原飞行的6 500 m左右,其次人工增雨中碘化银AgI烟条播云时烟剂所产生的云凝结核物质需充分扩散且不损伤螺旋桨和机身,同时考虑无人机的最大起飞质量、抗风雨能力、可靠性、飞行器气动特性、飞行性能和使用寿命等方面指标和要求,对无人机的动力系统需要调整。一方面调整发动机的动力输出功率,另一方面对发动机的安装位置进行调整。低速无人机用耗油率低的活塞式发动机驱动螺旋桨作为动力装置,而高原飞行高度和人工增雨的任务需求估算,需配备功率在29~37 kW左右的航空发动机才能达到技术要求。经调研和选型,德国生产的LIMBACH-L550发动机额定功率为31 kW,且为电喷式发动机,代替了原型机的化油器式发动机。发动机的安装位置由机身后部后推式改为机头前部前拉式提高催化剂的扩散率,此外为深入−4 ℃以下的云中将螺旋桨改为防雹桨,并在机翼前缘和静压管位置安装加热除冰器件,经以上动力系统的调整和改变后,动力输出满足无人机在高原人工增雨的飞行要求,经后期飞行试验表明动力系统的调整满足设计要求。
在高原地区地势起伏较大,平坦的起降场较少,要改变无人机的起降方式才能满足复杂地形条件下的高原起降。原型机通过轮式起降滑行距离较大,为适应高原起降将原型机起降方式改为汽车助推起飞和抛伞降落回收。
根据高原地区大范围人工增雨作业需求,无人机需挂载10根总质量达50 kg的催化剂烟条,并能探测大气温、压、湿等常规气象要素,同时为扩展无人机在航空摄影、灾情调查、大气监测等多种用途,增加任务载荷、航拍、气象信息采集等控制功能的航空电子系统,升级发动机、导航等飞行控制航空电子系统。
现有的人工增雨催化装置仅适用于有人驾驶飞机,其体积和质量远远大于无人机总载荷量,同时有人驾驶飞机的催化点火采用机上作业人员手动操控,无法直接移植到无人机上使用,为此研制了小型化的增雨播撒装置,并实现遥控点火控制和催化剂播撒状态的实时监控功能。
图1为设计完成后的飞行器系统的整体框架图,由“一平台两系统三装置”组成,实现了无人驾驶飞机的飞行控制和各项任务的执行。

图1 飞行器系统整体框架图Fig.1 Overall design frame of unmanned aerial vehicle
无人机飞行任务执行的优劣,不仅取决于飞行器平台,而且与飞行器地面测控平台紧密相关,为了改善无人机飞行控制能力,需对地面测控系统进行改造和升级,改造包括两部分,一部分为飞行器控制部分,改造后实现人工增雨飞行的航路规划,并通过上行通信传输指令使无人机按其规划航路飞行。根据人工增雨的作业任务需求,无人机需在不同的高度进行飞行器数据的采集和实施催化作业,实时采集信息并下传至地面端,地面端实时显示飞行轨迹、飞行姿态、航向、高度、GPS定位、发动机状况等数据,此外,飞行器起飞和降落也通过遥控指令使其执行;另一部分是将无人机采集的大气温度、湿度及气压、高度等(机载大气传感器自制,分辨率分别为温度0.1 ℃,湿度1%,气压10 Pa,高度1 m)气象信息和相关飞行数据通过数据传输链路回传至地面测控系统并实时显示增雨作业任务载荷相关数据。通过两方面的改造升级软件系统及配套硬件,使原型机仅显示简单的飞行控制信息升级为能够同步同屏显示无人驾驶飞机的飞行数据、气象数据和任务载荷执行状态的功能,实现人工增雨根据大气条件开展科学作业。
为满足高原人工增雨的需求,经以上设计和改造后,主要技术指标见表1。

表1 LY-ZY200型无人机主要性能指标Table 1 LY-ZY200 unmanned aerial vehicle main performance indicators
2 试验结果
2.1 技术性能测试
表2为LY-ZY200型无人机技术性能测试数据。由表2可知,原型机在高原初期试验时,以失败告终,经升级为电喷式发动机后,在低海拔地区阜阳试验时,满负荷起飞能够飞至4 500 m高度;后经长途运至高原地区,在海北州进行试验时仍然存在飞行器降落控制问题,试验中途终止;经技术维护后并选择相对开阔平坦的海南州二塔拉地区重新试验,试验结果表明飞行器能够达到飞行高度、续航时间、测控半径、载荷量、起降方式的要求,但爬升率、气象信息采集、软件功能等方面仍然欠缺。
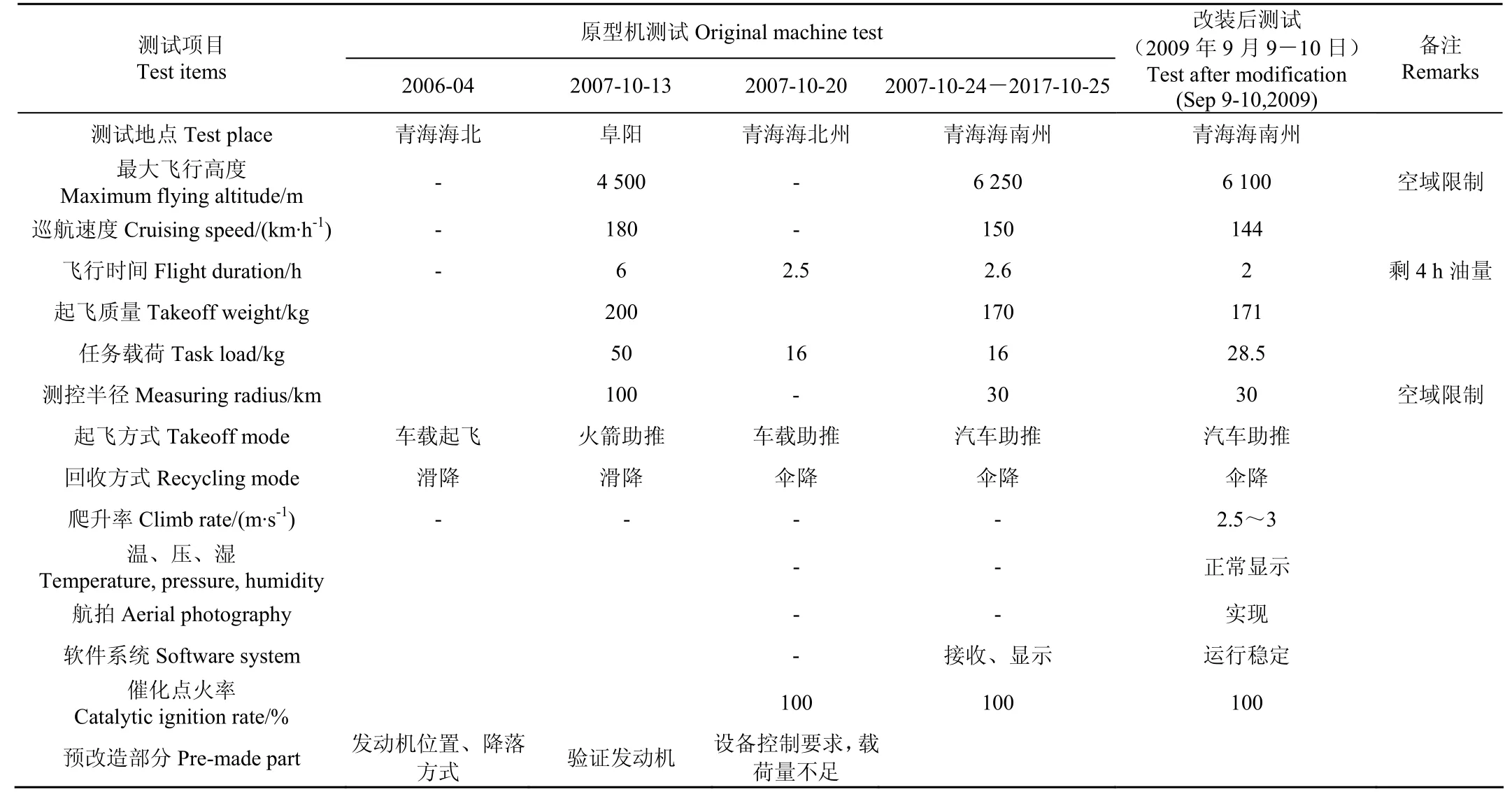
表2 LY-ZY200型无人机技术性能测试数据Table 2 LY-ZY200 unmanned aerial vehicle technical performance test data
后经过近2 a的结构改变、测控系统、任务载荷、软件系统等方面的改造,于2009年9月10日进行整体性能综合测试。测试结果表明,LY-ZY200型无人机在高原地区(海拔高度3 000 m以上)能车载助推起飞和抛伞降落回收;测试飞行最大相对高度为3 100 m(空域批复高度为海拔6 000 m以下),此高度飞行的爬升率达1.5 m/s,充分证明LY-ZY200无人机最大升限可以达到指标6 500 m(海拔高度);地基遥控发射采用25 W功率,230 MHz频率,且天线增益5 dB,地基遥控接收采用3.5 dB增益天线;飞行器端遥测发射采用1 W功率,460 MHz频率,天线增益5 dB,飞行器端遥测接收采用10.2 dB增益天线,以3 000 m相对高度按接收灵敏度、无线作用距离衰减、地球曲率影响等公式计算,综合考虑上行遥控发射及接收作用距离、下行遥测发射及接收作用距离和地球曲率影响,最大飞行控制半径为154 km,满足技术指标规定的100 km,测控链路相关数据详见表3,而测试中因空域限制飞行控制半径为30 km。
人工增雨无人机的首要目的是实现增雨的任务载荷及对任务载荷的控制执行,改装后根据任务载荷技术性能要求进行飞行测试,携带4根碘化银烟条,点火成功率为100%,同时测试中安装了航拍仪(佳能EOS 5D2,1 200万像素),实现航拍控制功能,大气温度、气压及相对湿度传感器能够实时采集数据并成功下传各高度层的温度、气压、相对湿度信息至地面站,地面站能够同步显示温压湿、飞行状态、催化剂工作状态等信息,满足人工增雨天气的探测和作业要求。测试中加油量为42 L,飞行测试中最大油耗为7.2 L/h,按油耗计算,完全满足续航4 h能力。图2为LY-ZY200型无人机起飞准备、地面测控站、抛伞降落回收及播撒试验等状况。图3为此次性能测试探测的气象和测控信息记录图,由图3可知,无人机地面遥控指挥车实现了催化剂点火、航拍、气象信息采集、飞行高度测量和起降方式等控制功能。

表3 测控链路相关数据Table 3 Measurement and control link-related data
图2 改装后LY-ZY200型无人机状况Fig.2 Situation of modified LY-ZY200 unmanned aerial vehicle

图3 2009年9月10日LY-ZY200技术性能测试Fig.3 LY-ZY200 technical performance test in September 10, 2009
2.2 典型增雨试验
经技术指标性能测试后,LY-ZY200型无人机各项性能达到表1所列的技术指标要求,可实施增雨试验任务,文中选择了2次典型增雨试验数据,以反映复杂天气条件下无人机飞控、载荷及增雨直观效果显示,表4是2次LY-ZY200型无人机典型增雨试验数据。
利用LY-ZY200型无人机进行人工增雨试验,一方面测试无人机在高原地区复杂天气条件下的飞行控制和载荷能力,另一方面试验催化剂播撒后增雨效果,目前增雨催化分为冷云和暖云催化,其中冷云催化又分为静力和动力2种催化方式,在高原地区以冷云为主的低层云,一般采用冷云动力催化方式[36]。试验中无人机开展作业的判据主要以机上下传的气象信息为主,即相对湿度大于65%,温度范围在−15~10 ℃之间,有云状况下进行播撒作业,针对高原地区主要以层积混合性的冷云为主,水汽辐合较强、含量丰富,采用较大剂量播撒作业,使云中可降水量充分转化形成降水,从而增加地面降水量,即在气象条件较好的情况下,实施大剂量播撒,实现较大的增雨量。增雨试验中无人机飞行航路的规划主要依据大气综合探测场,并根据雷达和卫星实时观测的数据规划出飞行航路位置及高度。无人机在起飞初期通过地面有人操控起飞,平稳飞行后将规划的航路上传至无人机,从有人操控切换为无人操控,然后无人机按照航路规划飞行,飞行中根据无人机探测的大气参数实施地面手动遥控点燃机上催化剂,开展人工增雨播撒作业试验。

表4 LY-ZY200型无人机典型增雨试验数据Table 4 Typical enhancement rainfall test data using LY-ZY200 unmanned aerial vehicle
图4为2009年9月13日增雨试验,地面观测为层积云并伴有毛毛雨,13:00之后由无降水转小雨,后期又转为毛毛雨,至起飞前降水基本维持毛毛雨,说明层积云主要以比较稳定的层云为主,且云中相对湿度最大达到87%,温度层为0 ℃。试验中无人机加油约37 L,载单根4 kg碘化银烟条10根,起飞质量达171 kg,满负荷起飞平均油耗为7.1 L/h。根据测试表明在复杂天气条件下,无人机能够实现催化点火率100 %、航路规划及调整、爬升降落控制、气象传感器实时采集等人工增雨控制能力。飞行中为测试无人机增雨效果设计并实施航路规划,规划以地面测控点为中心,向西南和东北方向各延伸5 km(地面交通道路方向),宽度达1 km的矩形播撒区。
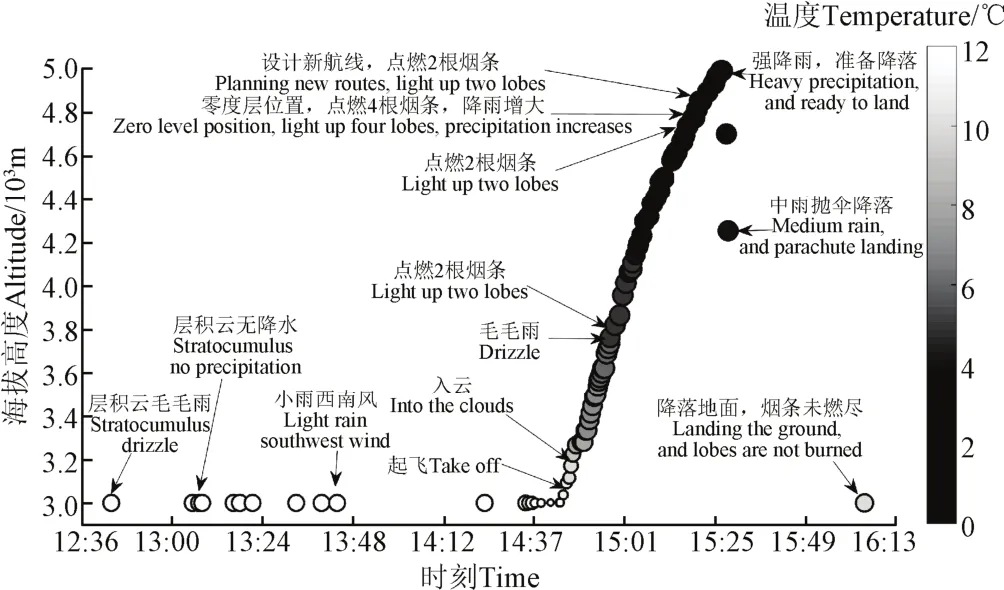
图4 2009年9月13日LY-ZY200型无人机作业飞行和播撒记录Fig.4 Operations and flight records of LY-ZY200 unmanned aerial vehicle on September 13, 2009
无人机于14:45起飞,14:50入云,15:01点燃2根烟条,15:22点燃2根,此时地面降雨在不断增大,气象信息显示已达0 ℃,紧接点燃4根烟条,并设计新航路,再次点燃2根,飞行2 min 43 s后,雨势突然增大,为飞行控制安全准备降落,降至4 400 m高度进行抛伞降落,此时,降雨强度达中雨强度。抛伞降落位于地面测控点4 km左右,受风的影响飞机实际降落点偏差达1.5 km左右,另燃烧时间达25 min的碘化银烟条尚未全部燃尽,至地面弱扩散使无人机后翼微有熏黑,机体无影响,气象传感器采集精度不高、信号有微延迟等问题。此外,一方面迫于地面强降雨影响,为飞行控制安全应急降落,另一方面在新航路规划时,为测试无人机转向自控能力,操作手设计了小于60°的转角,但在此小角度情况下无人机无法实现顺利转向,出现失速下降。虽已失速下降,但仍然能控制发动机关停和抛伞降落等各项功能,实现安全着陆过程。
此次在有利天气条件下开展的增雨试验,直观观测表明利用无人机可以实现复杂天气条件下在适当位置进行人工增雨播撒作业,且降雨在非播撒区未出现播撒区同等强度和量级,可直观显现增雨效果。2011年9月6日增雨试验以满天层云为主,受空域审批限制,飞行高度为6 000 m,测控半径30 km,成功完成了无人驾驶飞机航拍和人工增雨作业试验等任务,试验后地面产生零星小雨。无人机在复杂天气条件下开展的增雨试验表明,研制的LY-ZY200型无人机能够适应高原地区复杂天气条件下的安全起降、增雨作业、航拍和信息传输等功能,达到了预期的设计指标。
3 结 论
以LY-Z200原型机为雏形,通过对起降方式、发动机功率和位置、除冰器等方面的改变和调整,以及加装大气常规探测仪器、增雨播撒系统、航拍仪器等功能,经高原地区多架次的试验飞行,结果表明:
1)LY-ZY200型无人机飞行高度6 100 m,起飞质量171 kg,有效载荷50 kg,巡航速度187.2 km/h,巡航时间4 h,满足高原地区实施大范围人工增雨的任务载荷量和航程需求。
2)在无人机上加装除冰器件和改变桨叶,实现了低温云区的安全飞行;增加探测和增雨播撒装置,实现了播云的科学作业。
3)多架次的技术性能和增雨试验表明LY-ZY200型无人机适应高原人工增雨相关任务,且能够穿越较厚的云层和复杂的云内环境,实现平稳飞行和规划点播云,试验比较直观地反映出在有条件的云中播撒催化剂,可有效增加地面降水,为人工影响天气开辟了比较理想的作业方式和探测工具。
致谢 感谢多年参加人工增雨无人机高原试验的各位同仁,是你们艰苦付出和不懈努力获取到人工增雨无人机飞行控制等方面的实际性能,也为中国人工增雨无人机的发展积累了第一手资料,在此表示衷心的谢意!
[1] 郑波,汤文仙. 全球无人机产业发展现状与趋势[J]. 军民两用技术与产品,2014(8):8-11.
[2] 陶于金,李沛峰. 无人机系统发展与关键技术综述[J]. 航空制造技术,2014(20):34-39.
[3] 温杰. 美国无人机自主空中加油技术取得突破[J]. 国际航空,2015(5):16-19.
[4] 高劲松,王朝阳,陈哨东. 对美国无人机自主控制等级的研究[J]. 航空科学技术,2010(2):40-43.
[5] 王燕. 未来的火星飞机:美国新型火星大气层进入探测器概念研究[J]. 国际太空,2014(11):52-56.
[6] 孟佳男,陈浪,贾建峰,等. 低空航拍无人机[J]. 甘肃科技,2014,30(11):60-63.
[7] 雷小途. 无人机在台风探测中的应用进展[J]. 地球科学进展,2015,30(2):276-283.
Lei Xiaotu. Progress of unmanned aerial vehicles and their application to detection of tropical cyclone[J]. Advances in Earth Science, 2015, 30(2): 276-283. (in Chinese with English abstract)
[8] 马瑞升,马舒庆,王利平,等. 微型无人驾驶飞机火情监测系统及其初步试验[J]. 气象科技,2008,36(1):100-104.
Ma Ruisheng, Ma Shuqing, Wang Liping, et al. Preliminary experiment of forest fire monitoring system on unmanned aerial vehicle[J]. Meteorological Science and Technology, 2008, 36(1): 100-104. (in Chinese with English abstract)
[9] 汪改,马舒庆,潘毅. 微型无人驾驶飞机探空试验[J]. 气象与减灾研究,1999,22(2):35-37.
[10] 吴益明,卢京潮,魏莉莉,等. 无人机地面控制站系统的应用研究[J]. 航空精密制造技术,2006,42(3):48-50.
Wu Yiming, Lu Jingchao, Wei Lili, et al, Design and realization of UAV ground navigation station system application research of UAV ground control system[J]. Aviation Precision Manufacturing Technology, 2006, 42(3): 48-50. (in Chinese with English abstract)
[11] 文晟,兰玉彬,张建桃,等. 农用无人机超低容量旋流喷嘴的雾化特性分析与试验[J]. 农业工程学报,2016,32(20):85-93.
Wen Sheng, Lan Yubin, Zhang Jiantao, et al. Analysis and experiment on atomization characteristics of ultra-lowvolume swirl nozzle for agricultural unmanned aviation vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(20): 85-93. (in Chinese with English abstract)
[12] 张昆,张铁民,廖贻泳,等. 基于Labview的遥控无人机操控测试系统[J]. 农业工程学报,2015,31(增刊2):11-16.
Zhang Kun, Zhang Tiemin, Liao Yiyong, et al. Remote control unmanned aerial vehicle test system based on Labview[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(Supp.2): 11-16. (in English with Chinese abstract)
[13] 茹煜,金兰,贾志成,等. 无人机静电喷雾系统设计及试验[J]. 农业工程学报,2015,31(8):42-47.
Ru Yu, Jin Lan, Jia Zhicheng, et al. Design and experiment on electrostatic spraying system for unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(8): 42-47. (in Chinese with English abstract)
[14] 张波,罗锡文,兰玉彬,等. 基于无线传感器网络的无人机农田信息监测系统[J]. 农业工程学报,2015,31(17):176-182.
Zhang Bo, Luo Xiwen, Lan Yubin, et al. Agricultural environment monitor system based on UAV and wireless sensor networks[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(17): 176-182. (in Chinese with English abstract)
[15] 杨贵军,李长春,于海洋,等. 农用无人机多传感器遥感辅助小麦育种信息获取[J]. 农业工程学报,2015,31(21):184-190.
Yang Guijun, Li Changchun, Yu Haiyang, et al. UAV based multi-load remote sensing technologies for wheat breeding information acquirement[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(21): 184-190. (in Chinese with English abstract)
[16] 李继宇,周志艳,兰玉彬,等. 旋翼式无人机授粉作业冠层风场分布规律[J]. 农业工程学报,2015,31(3):77-86.
Li Jiyu, Zhou Zhiyan, Lan Yubin, et al. Distribution of canopy wind field produced by rotor unmanned aerial vehicle pollination operation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 77-86. (in Chinese with English abstract)
[17] 李冰,刘镕源,刘素红,等. 基于低空无人机遥感的冬小麦覆盖度变化监测[J]. 农业工程学报,2012,28(13):160-165.
Li Bing, Liu Rongyuan, Liu Suhong, et al. Monitoring vegetation coverage variation of winter wheat by low-altitude UAV remote sensing system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(13): 160-165. (in Chinese with English abstract)
[18] 李继宇,周志艳,胡炼,等. 圆形多轴多旋翼电动无人机辅助授粉作业参数优选[J]. 农业工程学报,2014,30(11):1-9.
Li Jiyu, Zhou Zhiyan, Hu Lian, et al. Optimization of operation parameters for supplementary pollination in hybrid rice breeding using round multi-axis multi-rotor electric unmanned helicopter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(11): 1-9. (in Chinese with English abstract)
[19] Cambone S. Unmanned aircraft systems roadmap 2005-2030[R]. Washington DC: United States. dept. of Defense. office of the Secretary of Defense, 2005.
[20] 易湘生,尹衍雨,李国胜,等. 青海三江源地区近50年来的气温变化[J]. 地理学报,2011,66(11):1451-1465.
Yi Xiangsheng, Yin Yanyu, Li Guosheng, et al. Temperature variation in recent 50 years in the three-river headwaters region of Qinghai Province[J]. Acta Geographica Sinica, 2011, 66(11): 1451-1465. (in Chinese with English abstract)
[21] 郑泳宜,尹宪志,付双喜,等. 无人机在祁连山地区人工增雨(雪)中的应用分析[J]. 现代农业科技,2015(1):227-229.
[22] 马舒庆,郑国光,汪改,等. 一种人工影响天气微型无人驾驶飞机及初步试验[J]. 地球科学进展,2006,21(5):545-550.
Ma Shuqing, Zheng Guoguang, Wang Gai, et.al. The study of miniature robot aircraft for weather modification[J], Advances in Earth Science, 2006, 21(5): 545-550. (in Chinese with English abstract)
[23] 邵洋,刘伟,孟旭,等. 人工影响天气作业装备研发和应用进展[J]. 干旱气象,2014,32(4):649-658.
Shao Yang, Liu Wei, Meng Xu, et al. Development and application advances of cloud seeding Instruments[J]. Journal of Arid Meteorology, 2014, 32(4): 649-658. (in Chinese with English abstract)
[24] 于子平,王晋华,钱毅,等. 人工影响天气探测作业无人机系统:CN104412878A[P]. 2015-03-18.
[25] 吴希拴,师小娟,王建培. 无人机气动特性改进及风洞试验研究[J]. 空气动力学学报,2004,22(1):36-40.
Wu Xishuan, Shi Xiaojuan, Wang Jianpei, Wind tunnel experimental research on aerodynamic improvement of UAV[J]. Acta Aerodynamica Sinica, 2004, 22(1): 36-40. (in Chinese with English abstract)
[26] 薛富利. 柔翼无人机用于人工增雨的探索研究[J]. 地球,2016(4):11.
[27] 段海滨,邵山,苏丙未,等. 基于仿生智能的无人作战飞机控制技术发展新思路[J]. 中国科学:技术科学,2010,40(8):853-860.
[28] 毕红哲,张洲宇,申功璋,等. 无人机感知与规避技术研究进展[J]. 电子测量与仪器学报,2016,30(5):661-668.
Bi Hongzhe, Zhang Zhouyu, Shen Gongzhang, et al. Recent progress in UAV sense and avoid system[J]. Journal of Electronic Measurement And Instrumentation, 2016, 30(5): 661-668. (in Chinese with English abstract)
[29] Bates T S, Quinn P K, Johnson J E, et al. Measurements of atmospheric aerosol vertical distributions above Svalbard, Norway using unmanned aerial systems (UAS)[J]. Atmospheric Measurement Techniques, 2013, 6(8): 2115-2120.
[30] Breed D, Rasmussen R, Weeks C, et al. Evaluating winter orographic cloud seeding: Design of the Wyoming Weather Modification Pilot Project (WWMPP)[J]. Journal of Applied Meteorology & Climatology, 2014, 53(2): 282-299.
[31] Brown S T, Lambrigtsen B, Denning R F, et al. The high-altitude MMIC sounding radiometer for the global hawk unmanned aerial vehicle: Instrument description and performance[J]. IEEE Transactions on Geoscience & RemoteSensing, 2011, 49(9): 3291-3301.
[32] Dalamagkidis K, Valavanis K P, Piegl L A. On unmanned aircraft systems issues, challenges and operational restrictions preventing integration into the National Airspace System[J]. Progress in Aerospace Sciences, 2008, 44(7): 503-519.
[33] Diaz J A, Pieri D, Wright K, et al. Unmanned aerial mass spectrometer systems for in-situ volcanic plume analysis[J]. Journal of the American Society for Mass Spectrometry, 2015, 26(2): 292-304.
[34] Rosenfeld D, Axisa D, Woodley W L, et al. A quest for effective hygroscopic cloud seeding[J]. Journal of Applied Meteorology & Climatology, 2010, 49(7): 1548-1562.
[35] Axisa D, Defelice T P. Modern and prospective technologies for weather modification activities: A look at integrating unmanned aircraft systems[J]. Atmospheric Research, 2016(178/179): 114-124.
[36] 郭学良. 大气物理与人工影响天气[M]. 北京:气象出版社,2010:264-305.
Development and experiment of enhancement precipitation unmanned aerial vehicle adapted to weather and topography of plateau
Ma Xueqian1, Sun Anping2, Zhang Xiaojun1, Han Huibang1
(1. Weather Modification Office of Qinghai Province, Xining 810001, China; 2. Qinghai Meteorological Bureau, Xining 810001, China)
The Source Region of Three Rivers is the cradle of China’s Yangtze River, Yellow River and Lancang River. It is also a national wetland, a region with biodiversity and ecological fragility. With the economic development and environmental deterioration, the shortage of freshwater resource has become the important obstacle of economic construction and ecological restoration. Development and utilization of freshwater resource in the atmosphere is one of the main ways to solve the shortage of freshwater source on the ground surface. The implementation of artificial enhancement precipitation is an effective mean to the development of cloud water resource in complex weather conditions. The conventional manned aircraft, rocket and artillery operations cannot carry out scientific cloud seeding implementation into complex weather operation field because of some safety and airspace restriction issues, however, unmanned aircraft is a valuable tool to control and recover in meteorological survey and cloud seeding, and it is also an important direction of key technology of equipment research and development in weather modification. It is imperative that the developed unmanned aircraft, which is suitable for the characteristics of the plateau weather, adverse climate and complex terrain, is detectable, operable, controllable and recyclable, and has long voyage and high payload in enhancement precipitation. In the study, the unmanned aircraft of LY-Z200 prototype was employed as the embryonic form; through changing its mode of landing and takeoff, adjusting the engine power and position, and installing the deicer, the flying height and safety were improved. After the installment of sensors of conventional atmospheric detection, small cloud seeding instrument, and aerial photography equipment, the unmanned aircraft was developed completely, which was LY-ZY200 prototype suitable for plateau enhancement precipitation. Using this unmanned aircraft, 4 modification tests showed that the engine power of unmanned aircraft was affected by hypoxia in a high altitude, the flying height was decreased, the takeoff distance was lengthened, and the height of climbing was lowered. Accordingly, the LIMBACH-L550 electric field intensity engine with 31 kW was used to improve the climbing height, and the results displayed that the flight height was up to 6 100 m, the takeoff weight was 171 kg, the payload was 50 kg, the oil volume was 42 L the maximum fuel consumption was 7.2 L/h, the cruising speed was up to 187.2 km/h, and the cruising time was up to 4 h. These indications satisfied the diverse requirements to implement a wide range of the enhancement precipitation task and the loading in the plateau field. The deicing device was installed and the propeller to resist hail was upgraded in the unmanned aircraft to ensure it could normally operate in -4 ℃ low-temperature cloud field safely and efficiently. The installed sensors of atmospheric temperature, humidity and pressure and the designed small-scale enhancement precipitation seeding device could ensure to carry 10 catalytic lobes and perform scientific operations in appropriate seeding fields. Upgraded flight control and mission systems could achieve information exchange and diverse mission requirements between unmanned aircraft and ground terminal. Using the LY-ZY200 prototype in plateau complex weather conditions, the typical enhancement precipitation test results showed that the unmanned aircraft could pass through the thick cloudy and the complex environment in cloud, achieve a stable, planning and seeding flight, and obviously reflect the effects of enhancement precipitation in cloud seeding on the ground. Consequently, the unmanned aircraft opens an ideal operation mode and provides a detection tool for enhancement precipitation at proper position, time and amount.
unmanned aerial vehicle; control; experiments; plateau; enhancement precipitation
10.11975/j.issn.1002-6819.2017.15.013
S252+.4
A
1002-6819(2017)-15-0105-07
2017-04-06
2017-06-04
国家自然科学基金项目(41665008,41565008);国家留学基金委员会西部地区人才培养特别项目;中央级公益性科研院所基本科研专项(CAFYBB2016SY003);青海省科技厅重点攻关项目(2007-G-142)
马学谦,男,青海乐都人,高级工程师,2014年赴美国国家大气研究中心访学,主要从事云和降水物理技术及雷达气象研究。西宁 青海省人工影响天气办公室,810001。Email:moblflyqxm@126.com
猜你喜欢
军事文摘(2022年8期)2022-11-03
小学科学(学生版)(2021年3期)2021-04-13
哈哈画报(2021年11期)2021-02-28
中华老年口腔医学杂志(2016年1期)2017-01-15
故事大王(2016年7期)2016-09-22
中国火炬(2015年7期)2015-07-31
中国火炬(2014年5期)2014-07-24
儿童故事画报(2013年3期)2013-06-24
中国火炬(2012年3期)2012-07-25
小哥白尼·军事科学画报(2009年9期)2009-09-14
