一种多帧相关滤波的星敏感器像素非均匀性误差校正方法
2017-09-23 01:36郑循江叶志龙杨勤利孙朔冬
空间控制技术与应用 2017年4期
郑循江,叶志龙,杨勤利,孙朔冬
(1.上海航天控制技术研究所,上海 201109; 2.上海市空间智能控制技术重点实验室,上海 201109)
一种多帧相关滤波的星敏感器像素非均匀性误差校正方法
郑循江1,2,叶志龙1,2,杨勤利1,孙朔冬1,2
(1.上海航天控制技术研究所,上海 201109; 2.上海市空间智能控制技术重点实验室,上海 201109)
为了进一步提升星敏感器的星点定位精度,分析星敏感器的像素误差来源和形成机理,提出一种多帧相关滤波的像素非均匀性误差校正方法.根据星图中星点的位置确定质心定位域和局部校正域,利用当前帧星图信息和前一帧的局部校正域信息预测当前帧的校正域,满足校正条件后采用差分法校正质心定位域.实验结果表明,本文方法能够较好地预测星图的非均匀性噪声,提升星点定位精度,具有较好的鲁棒性.
星敏感器;非均匀性误差;多帧相关滤波;星点定位
0 引 言
星敏感器作为一种高精度的姿态测量器件,已经广泛应用于卫星、飞船等航天器的姿态确定中.航天高精度任务的频繁开展,对星敏感器的定姿精度和误差要求也越来越高,已经从角秒级逐步迈向亚角秒级.现有的误差控制手段已不能满足使用需求,必须从星敏感器工作全过程多方面地进行误差抑制[1-3].
星敏感器的误差主要来源于星点的定位误差.星敏感器的光学系统通常采用离焦技术将恒星的能量分散成一个几乘几的类高斯分布的窗口中,根据每个像素的灰度值,采用亚像素细分算法计算星点的质心.由此可知星点的定位误差主要由细分算法的误差和像素误差构成.目前,对于星点细分算法的研究已相对成熟,常用的有质心法、基于阈值的质心法、平均加权质心法、曲面拟合法、基于样条的插值法等[4-5].星点定位精度的高低主要取决于像素响应反应星点能量分布的真实程度,及时准确地校正由于像素响应产生的像素误差就显得尤为重要.目前对于星敏感器像素误差的产生机理研究及误差抑制技术研究尚处于起步阶段.贾辉等[6]则采用频域方法,从成像模型角度探究了星点的提取误差影响因素,但尚未研究其误差产生内在机理.文献[7]在分析星点定位误差模型的基础上,指出抑制像素的非均性噪声是进一步提升星点定位精度的重要手段,但其并未给出相关噪声抑制及误差补偿方法.文献[8]实现了每个像素的非均匀性误差校正,但未考虑在轨探测器的退化情况,不适用于长寿命的星敏感器使用.Schmidt[9]考虑了星敏感器的在轨使用情况和实时性要求,将所有噪声统一考虑为像素的非均匀性噪声,并进行像素级的噪声预测,采用背景差分法对星点定位区域进行了误差校正.然而,该方法仅考虑低速的情况,使用范围受限,对于孤立噪点或者坏像元鲁棒性较差.
由此可见,校正像素误差是提高星点定位精度的重要途径,而像素的非均匀性误差是像素误差产生的最重要来源,现有的校正方法尚存在着应用效果不佳、适应范围受限等问题.本文从像素误差来源入手,研究其产生机理,分析星点的定位误差,同时考虑星敏感器实际使用环境,重点研究像素非均匀性误差的补偿方法.
1 星点像素误差来源分析
星敏感器采用亚像素细分技术将星点弥散成探测器上多个像元组成的光斑,其能量成高斯分布,并通过像素加权算法求取星点的质心,以达到星点的亚像素定位精度.若像元(i,j)为组成星点的像元之一,其中心坐标为(xi,yi),像元接收的能量为f(xi,yi),则该星点的定位坐标为
(1)
星点在成像过程,探测器像元的响应值,即星点像素的灰度值会受到多种因素的影响.像元的接收的能量f(xi,yj)包含两部分:星点真实能量响应Sij和像素噪声响应Nij,即f(xi,yj)=S(xi,yj)+Nij.星点真实的定位坐标应为
(2)
则星点定位误差为
(3)
由式(1)~(3)可知,像素噪声是星点定位误差的主要来源.星点成像及定位流程产生的噪声如图1所示.
杂光干扰主要与使用环境有关,可通过遮光罩设计保证一定的杂光保护角,同时辅以算法提高星点的提取能力.对于光学镜头引入的误差可以通过优化镜头设计,同时采用标定手段进行修正,标定精度已达到亚角秒级.读出噪声属于电路噪声,虽可通过延长积分时间,降低此项噪声,但同时也增大了暗电流噪声.可对电路进行相应的降噪设计改善读出噪声.作为像素噪声的重要组成部分,像素的非均匀性噪声一直是星敏感器关注的重点,然而现有的方法多是关注理论或者是其中的某一个点,且对于实际使用过程中的问题考虑也不尽全面,并不能较好完成噪声抑制工作.对此,本文重点研究一种像素非均匀性误差补偿校正方法.
2 基于多帧相关滤波的非均匀性误差补偿校正方法
现有补偿方法通常是在地面上对每个像素的响应特性进行标定,并将结果嵌于产品内部.需要星敏感器内部有足够的存储空间.且该方法只在星敏感器的寿命初始阶段具有良好的效果,随着空间环境的变换和长时间的使用,探测器在轨会出现一定程度的退化,每个像素的响应特性也会出现不同程度变化.若此时仍采用初始标定的数据进行误差校正,必将引入新的误差.若对探测器在轨进行重新标定,则需要进行星图下传、数据分析、标定结果上注等繁琐操作.耗时长,时效性差,需要定期进行标较针对其中每个像素在较短时间内的响应是有相关性的.特性此研究了一种基于多帧相关滤波的非均匀性误差补偿校正方法.
假设星敏感器探测器分辨率为M×N,视场大小为X×Y.所拍摄的原始星图为IMG,星点在探测器上呈现为一个I×J的弥散斑.在全天识别阶段,星点质心定位像元(m,n)可直接测量得到,在星跟踪阶段,可根据光轴指向通过星库反算预测得到.如图2所示,定义星点质心定位域P(i,j),大小为I×J,其中心像元位置为(m,n),其外围一圈像素为星点的背景像素,定义星点局部校正域B(k,l),其大小为K×L,其中心像元位置为(m,n),局部校正域B(k,l)由质心校正区B_core和像素非均匀性预测区B_boader组成.预测区B_boader的大小由星敏感器的角速度、数据更新率及曝光时间等因素决定.
为了补偿像素非均匀性带来的星点定位误差,需要计算像素本身存在不一致性,即得到有效的质心校正区B_core.算法流程如下:
Step2.初始化.初始化质心定位域P和局部校正域B.初始化质心定位域P中的像素值为IMG中对应位置的像素值,即P(i,j)=IMG(m,n).局部校正域B中的B_boader的值为IMG中对应位置的像素值,B_core的像素值则初始化为0.
Step3.滤波更新B的值,B_boader对应的像素即为星点质心定位域外围一圈的像素,其像素值的大小由像素对背景的响应大小、星点能量的影响响应共同构成,且其值与相邻帧对应的像素值还具有一定相关性.设计一个滤波器,其原理框图如图3所示.图中Pbn表示质心定位域背景值和校正域边缘像素的差异性大小,滤波系数a反映了当前校正域值受当前帧质心域星点像素值的影响程度,背景滤波系数b则反映了当前校正域与前一帧校正域相关性大小,可适用于动态条件较大的情况.
Step4.更新B_boader,预测B_core.第1帧时,星点质心在像素(m,n)内,按Step 1初始化,并按Step 2计算B_ boader的值,并存储相应像素的值和位置信息.下一帧,若星点的质心仍在像素(m,n)内,则按Step 2持续更新B_boader.此时,B_core区域中并无有效的校正信息.当星点的质心转移到其他像素时,将B_core的值重新设置为0,并按Step 2计算B,得到新的B_boader,此时校正域B_core仅含有部分校正值,即星点定位于像素(m,n)处更新的B_boader,尚不能完成整个质心定位域P的校正工作.按Step 3所述方法继续估计校正域的值.
Step5.获取有效的校正值B_core.如图4所示,当星点质心定位了像素移动了I个像素时,B_core首次包含了有效的校正信息.
Step6.差分求解校正域.校正后的质心定位域C=P-B_core.算法流程图如图5.
3 实验结果
为了验证方法的有效性,进行了大量的仿真实验,并以某款星敏感器的外场观星数据为例加以说明,该星敏感器视场大小14.5°,探测器面阵 2 048×2 048,曝光时间为50 ms,数据更新率为4 Hz,运行角速度为地速.质心定位域的P尺寸为5×5,局部校正域尺寸为7×7,图6给出了连续20帧的星点图像.滤波参数a=0.6,b=0.4.同时为了验证方法的鲁棒性,在第9~15帧中的固定位置人为添加了一个孤立噪点.
图7给出了图6(8)的灰度分布图,从图7中可以看出星图的背景起伏不定,而在星点目标附近的背景不均匀性更为明显.利用本文所述方法求取校正域B,图8给出了局部校正域B的三维灰度分布图,从图中可以看出校正域B的灰度存在起伏,反映了像素存在的非均匀性,尤其是星点的能量较为集中的区域,这种非均匀性体现地更为显著.
为了更好地说明校正的过程,表1给出图6中
第8~16帧图像局部校正域的预测结果以及质心定位域校正结果,其中第9~15帧的固定位置有一孤立噪点.第一帧星点位置为(16,16).采用了多帧相关滤波技术后,计算的局部校正域B能够较好地反映星图的像素非均匀性情况.两个滤波参数更大程度体现了预测信息与真实信息的关联性,当出现孤立噪点进入质心定位域时,局部校正域B也能完美地体现.
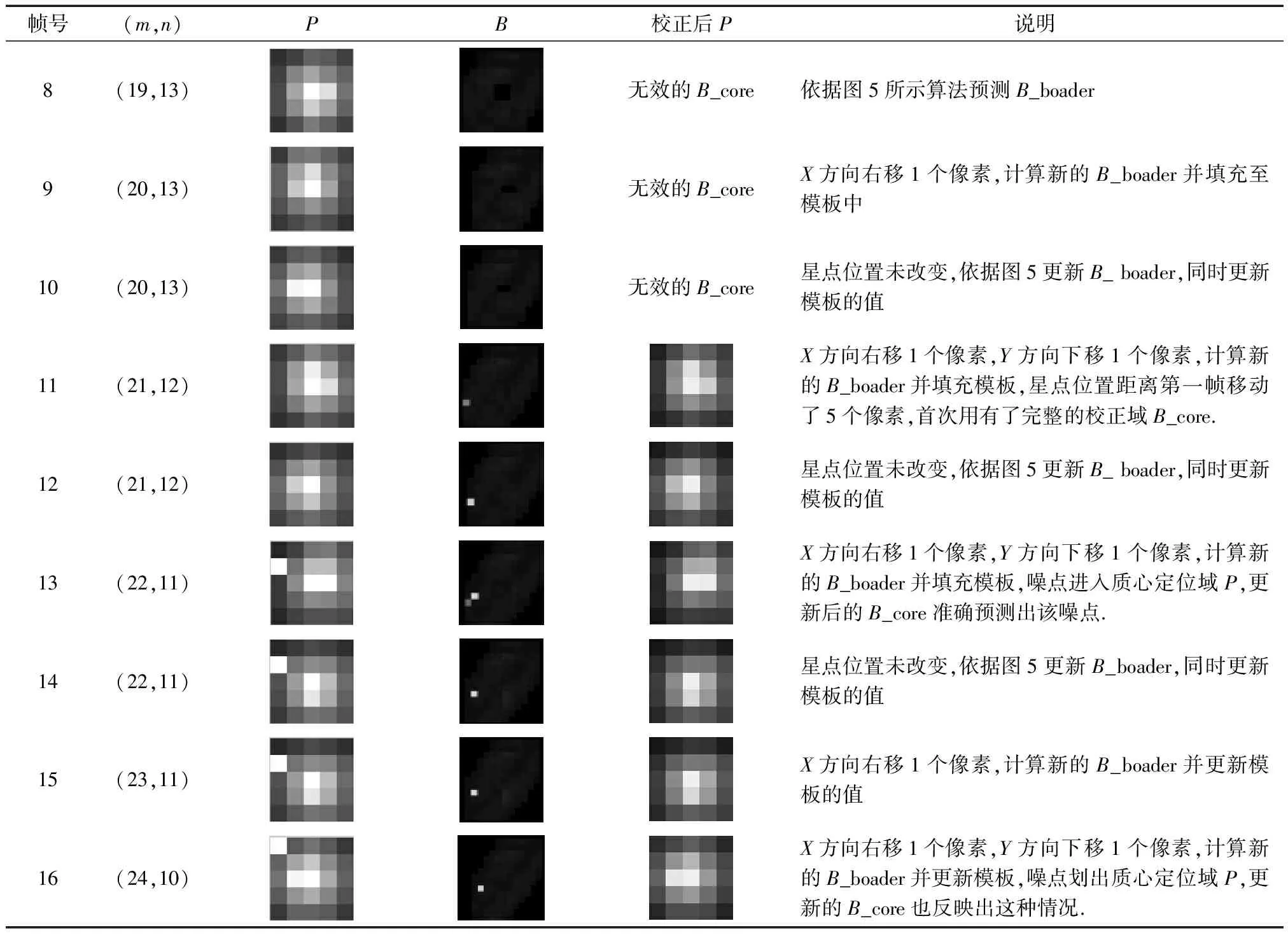
表1 星点校正情况Tab.1 The correction situation of star point
图9给出了静态情况下校正前后300拍质心定位误差情况,其中每个星点为探测器面阵上不同位置,从图9易知,校正后的星点定位误差大幅降低.为了说明本文方法在大角速度情况下的有效性,图10 给出了角速度为0.6(°)/s,方向为沿探测器X轴方向情况下校正前后星点的定位误差,可知,校正后的星点定位误差也有一定的减小.本文方法能够更加角速率动态选择质心定位域和校正域的尺寸,在动态条件下也可对星点进行一定的像素非均匀性补偿,为了进一步说明本文方法对动态性能的适应性,分别对0.08(°)/s、0.3(°)/s、0.6(°)/s 和1(°)/s 4种动态条件下进行非均匀性校正,结果如表2所示.
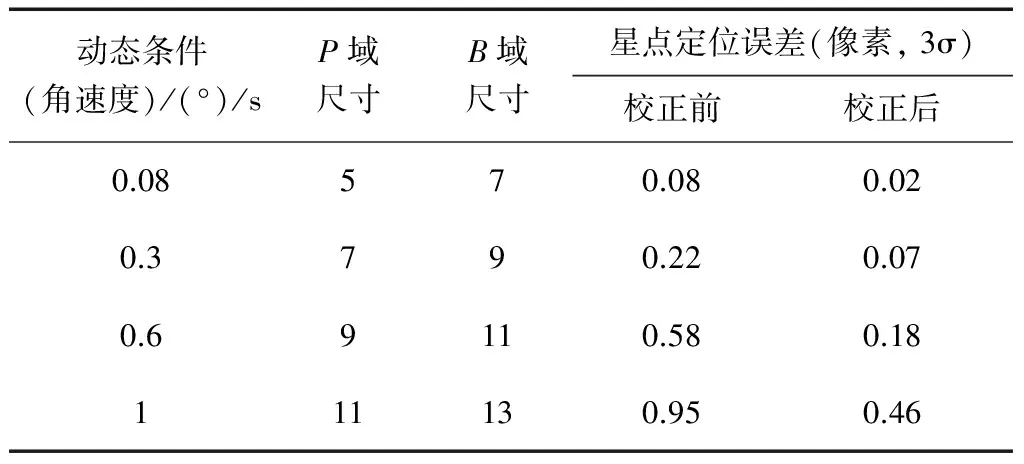
表2 校正前后星点定位误差统计Tab.2 Positioning error statistics before and after correction
从表2可以看出,4种动态条件下,校正后的星点定位精度均有了较大幅度的提升,随着角速度的增大,星点定位精度提升的幅度在减缓.在低角速度下(0.08(°)/s),星点定位精度提升了3倍,在大角速度下(1(°)/s),星点定位精度提升了约2倍.
4 结 论
本文从星敏感器的工作原理出发,分析了其误差来源和相关抑制方法,重点分析了像素误差对星点定位精度的影响,提出了一种多帧相关滤波的像素非均匀性误差校正方法.考虑到星敏感器的实际工作情况,根据工作情况确定质心定位域,利用星图的前后帧相关信息计算局部校正域,不仅可以较好地反映像素非均匀性,多项滤波参数设置还能对孤立噪点等像素异常情况完美地体现.实验和仿真结果表明,本文方法能够较好地适应星敏感器的实际情况,有效地对像素的非均匀性进行预测,提高了星点的定位精度.
[1] 张辉, 袁家虎, 刘恩海. CCD噪声对星敏感器星点定位精度的影响[J]. 红外与激光工程, 2006, 35(5):629-634. ZHANG H, YUAN J H, LIU E H. CCD noise effects on position accuracy of star sensor[J].Infrared and Laser Engineering, 2006, 35(5):629-634.
[2] 张之江, 邹宾, 陈迎娟. CCD亚像素细分中的像素响应不均匀性补偿技术[J].传感技术学报, 2005, 18(1):57-62. ZHANG Z J, ZOU B, CHEN Y J. Correction of CCD non-uniformity for sub-pixel determination[J].Chinese Journal of Sensors and Actuators, 2005, 18(1):57-62.
[3] 梁斌, 朱海龙, 张涛等. 星敏感器技术研究现状及发展趋势[J].中国光学, 2016, 9(1):16-26. LIANG B, ZHU H B, ZHANG T, et al. Research status and development tendency of star tracker technique[J].Chinese Journal of Optics, 2016, 9(1):16-26.
[4] RUFINO G, ACCARDO D. Enhancement of the centroiding algorthim for star tracker measure refinrment[J]. Acta Astronautic, 2003, 53(2):135-147.
[5] MA X Y, RAO C H, ZHENG H Q. Error analysis of CCD-based point source centroid computation under the background light[J]. Optics Express, 2009, 17(1):8526-8538.
[10] 向北海,于肇贤,曲寒冰.一种基于MFRAT和ICP的掌纹主线提取和配准算法[J].模式识别和人工智能,2015,28(3):260-265. XIANG B H, YU Z X, QU H B. An improved algorithm of principal line extraction and registration based on mfrat and icp pattern[J].Recognition and Artificial Intelligence,2015, 28(3):260-265.
ACorrectionMethodofNon-UniformityPixelErrorAppliedtoStarSensorBasedonMulti-FrameCorrelationFiltering
ZHENG Xunjiang1,2, YE Zhilong1,2, YANG qinli1, SUN Shuodong1,2
(1.ShanghaiInstituteofSpaceflightControlTechnology,Shanghai201109,China; 2.ShanghaiKeyLaboratoryofAerospaceIntelligentControlTechnology,Shanghai201109,China)
In order to further improve star positioning precision of star sensor, the pixel error source and formation mechanism are analyzed.Based on multi-frame correlation filtering, a correction method of non-uniformity pixel error applied to star sensor is proposed. Star centroiding field and local correction field are determined according to the position of star. The information of current-frame star map and former-frame local correction filed are utilized to predict the current-frame local correction field. Corrected star centroiding filed can be obtained by difference method. Experimental results show that non-uniformity noise can be predicted and positioning accuracy is improved better by proposed method, which is also with good robustness.
star sensor; non-uniformity error; multi-frame filtering; star positioning
V448.2
:A
: 1674-1579(2017)04-0031-06
10.3969/j.issn.1674-1579.2017.04.005
2017-04-28
吴云(1985—),男,工程师,研究方向为激光雷达及三维点云处理;李涛(1986—),男,工程师,研究方向为数字图像处理,立体视觉测量;吴宇(1983—),男,工程师,研究方向为测量与检测技术.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
导航定位学报(2022年5期)2022-10-13
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
导航定位学报(2021年4期)2021-08-29
飞控与探测(2020年3期)2020-07-16
空间控制技术与应用(2020年6期)2020-04-28
中学生数理化·教与学(2019年5期)2019-06-06
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01