改进的自适应核相关滤波目标跟踪
2017-10-11 03:27黄德天顾培婷柳培忠黄炜钦
华侨大学学报(自然科学版) 2017年5期
黄德天, 顾培婷, 柳培忠, 黄炜钦
(1. 华侨大学 工学院, 福建 泉州 362021;2. 华侨大学 机电及自动化学院, 福建 厦门 361021;3. 厦门大学 信息与通信工程博士后流动站, 福建 厦门 361005)

改进的自适应核相关滤波目标跟踪
黄德天1,2, 顾培婷1, 柳培忠3, 黄炜钦1
(1. 华侨大学 工学院, 福建 泉州 362021;2. 华侨大学 机电及自动化学院, 福建 厦门 361021;3. 厦门大学 信息与通信工程博士后流动站, 福建 厦门 361005)
利用核相关滤波器跟踪框架,提出一种改进的自适应颜色属性的目标跟踪方法.首先,构建循环样本矩阵,引进颜色属性作为特征描述目标;然后,采用流行学习局部线性嵌入(LLE)算法自适应地对特征向量进行降维,得到低维特征空间;最后,根据正则化最小二乘分类器获得目标位置.实验结果表明:文中算法的平均中心位置误差减少了21.29 px;在阈值为20 px时,平均距离精度提高了27.9%,平均跟踪速度为38 帧·s-1;与传统核相关滤波(KCF)算法相比,文中算法具有良好的光照不敏感性及更高的跟踪精度和鲁棒性.
目标跟踪; 核相关滤波器; 颜色属性; 局部线性嵌入
Abstract: An improved adaptive color attribute tracking algorithm is proposed based on the kernel correlation filter. Firstly, the cycle matrix is established, and color attribute is used to describe the target. Secondly, the local linear embedding (LLE) algorithm was applied to reduce the dimension of extracted feature to achieve a low-dimensional feature space. Finally, the position is obtained by learning the regularized least-squares classifiers. Experimental results demonstrate that the proposed algorithm reduces the median center location error by 21.29 px, the average distance precision is increased by 27.9% when the threshold is set 20 px, and the average tracking speed is 38 frames·s-1. Compared with the original kernelized correlation filters (KCF) algorithm, the proposed algorithm not only has well illumination insensitivity, but also has higher tracking accuracy and robustness.
Keywords: target tracking; kernelized correlation filters; color attribute; local linear embedding
视频目标跟踪是机器视觉领域的一个重要研究方向,广泛应用于人机交互、军事监控等领域.目前,较为普遍的目标跟踪算法是生成模型方法[1-2]和判别模型方法[3-9].在复杂背景下,目标跟踪易受到各种因素影响,如光照变化、目标遮挡、相似目标等,如何更精确地跟踪目标成为一个热门研究课题.Kalal等[3]提出TLD算法,将跟踪器、检测器和学习相结合.Zhang等[4]提出的压缩感知跟踪算法,首次将压缩感知引入视频跟踪中,构造一个投影矩阵,从而获得目标的位置.近年来,出现了系列相关滤波跟踪算法,其跟踪速度快、跟踪精度高.Henriques等[6]提出了循环矩阵(CSK)算法,采用循环移位的方式采集样本,并利用快速傅里叶变换,快速学习分类器,提高了跟踪速度.在此基础上,Henriques等[7]又提出了核相关滤波(kernelized correlation filters,KCF)算法,该算法首先采用循环位移构建样本,训练分类器时通过离散傅里叶变换(DFT)计算,极大地提高了目标跟踪速度,但目标受光照变化影响,使跟踪不精确,甚至跟丢.因此,本文提出了改进的自适应核相关滤波算法.
1 KCF跟踪算法
KCF跟踪器[7]所用的分类器为正则化最小二乘(RLS)分类器.假设x是大小为m×n的图像块,并设定一组训练样本及其回归值{(x1,y1),(x2,y2),…,(xi,yi),…},其训练的最终目标是找到一个函数f(z)=vTz,使得如下残差函数最小,即

式(1)中:λ是正则化参数.


式(2)中:K为核函数矩阵,矩阵元素为Ki,j=k(xi,xj);I为单位矩阵;向量y的元素为yi.由于K是循环矩阵,则式(2)可转换到DFT域,即

KCF算法利用核函数法及傅里叶变换极大地提高了算法实时性.但是,KCF算法采用HOG特征,无法正确提取复杂多变的目标特征[7],跟踪性能易受光照和目标遮挡等因素影响.
2 自适应KCF跟踪算法
在KCF框架上实现自适应目标跟踪,利用颜色属性具有对光照变化及部分遮挡不敏感等优点作为目标特征[8],使算法在复杂背景下能准确跟踪目标,从而提高算法的跟踪精确度和鲁棒性.通过局部线性嵌入(locally linear embedding,LLE)降维法自适应地对高维颜色特征降维,从而在保持特征原始拓扑结构的前提下,提高算法运行效率.
2.1颜色属性
引入颜色属性表示目标特征解决视觉跟踪的光照问题.Berlin等[9]对其进行研究,把颜色分为11类:黑色、蓝色、棕色、灰色、绿色、橙色、粉色、紫色、红色、白色和黄色.由于文中使用11维的颜色特征表示目标,高维的特征表示会影响跟踪速度,所以采用低维自适应方法简化特征表示,从而提高跟踪速度.
2.2低维颜色自适应属性
LLE算法[10]利用线性重建反映高维数据空间中的非线性结构,能够使降维的数据保持原有的拓扑结构,可以有效地降低由于降维引起的大量目标信息损失.因此,采用LLE算法对高维颜色特征降维,其主要流程如下.
1) 寻找相对于每个给定的样本的β个近邻样本.
2) 定义一个误差函数,即



为了求解矩阵W,应使式(4)最小,从而构建局部最优化重建权值矩阵,即
一般情况下,式(5)中的Qi是一个奇异值矩阵.
3) 由式(5)的wi,j及其近邻点xi计算出样本点的输出向量.为了将所有样本数据映射到低维空间上,需要构造一个代价函数,且映射过程中代价函数达到最小值,那么有



式(7)中:M是N×N的对称矩阵,M=(I-W)T(I-W).由式(7)可知,要使损失函数值达到最小,则取U为M的最小d个非零特征值所对应的特征向量.
LLE算法中近邻点个数β和输出维数d决定了算法的性能[11].文中所选的β值应尽量使式(4)的误差函数值达到最小,所以取β为7.若d取值高,则选取样本多会受到噪声影响;反之,样本数据的特征不能得到体现.通过大量实验,取d为2.在跟踪过程中,通过LLE算法降维,将11维的特征向量降为2维,提高了算法的实效性,并且保持原目标信息不被大量破坏,从而保证跟踪算法的鲁棒性.
2.3目标检测与模型更新
利用滑动窗口形式计算图像块z的所有子窗口的响应,响应值最大的子窗口即为目标的真实位置.利用核矩阵是循环矩阵这一性质,分类器的响应为
采用文献[7]提供的高斯核函数,通过式(8)获得目标的响应值,模型更新α和xt为

文中算法的步骤流程如下.
输入:视频序列It.
初始目标位置p0.
初始化:由初始目标位置p0及第一帧的目标模型x1,训练分类器得到系数α.
for i=2…frame
1) 通过上一帧位置获取图像块z,并得到特征矩阵;
2) 根据式(4)提取图像的低维颜色属性特征矩阵 projection_matrix;
3) 将矩阵projection_matrix带入分类器,通过式(8)计算目标的响应值;
4) 响应最大值arg maxf(z),为目标的真实位置;
5) 根据式(9),(10)更新模型αt,xt;
输出:检测出每帧的目标位置pt.
end for
3 实验结果与分析
为了验证文中算法的有效性,选用文献[12]提供的视频序列进行实验.同时,与CT算法[4]、CSK算法[6]、原始KCF算法[7]的跟踪效果进行对比.在实验中,跟踪算法的所有参数保持不变,取β=7,本征维数d=2,高斯核的标准差σ=0.2,学习因子γ=0.075.实验采用MATLAB编程环境.PC配置为Intel(R) Core(TM) i5-4590M CPU@3.30 GHz ,RAM为8 G.
3.1实验结果分析
视频序列的部分跟踪结果,如图1所示.图1中:点框表示文中算法;线段框表示CSK算法;点线框表示KCF算法;实线框表示CT算法.

(a) Shaking

(b) Singer1

(c) Dark car

(d) Mountain bike

(e) Soccer1图1 部分跟踪结果Fig.1 Partial tracking result
根据图1所提算法的结果进行分析,得到以下3点结论.
1) 光照变化和尺度变化.由图1(a)可知:吉他手头部晃动剧烈,且存在光照变化影响,在目标进入复杂背景区域时受到强光干扰,CT和CSK算法错误的跟踪非目标人物,KCF算法也出现很大的偏移,只有文中算法能较好地完成全程跟踪,能以较高的精度跟踪整段视频.因此,与原始的KCF算法相比,文中采用的颜色属性特征对光照变化不敏感,当受到强光干扰时,可实现全程准确的稳定跟踪.图1(b)Singer1视频序列中,存在光照影响和尺度变化,4种算法都有较好的跟踪结果,但是文中算法的中心位置误差明显优于其他算法,体现了更好的跟踪稳定性.
2) 复杂背景干扰和旋转.图1(c)中,当车辆行驶时,目标跟踪易受到周围复杂背景及类似目标的影响,在第284帧时,CT算法完全跟踪失败,KCF正在偏移,累计错误信息,导致丢失目标;而文中提出的自适应颜色属性特征具有光照不变性和抗噪性能,因此,能有效避免视频中复杂背景等情况,完成跟踪.图1(d)Mountain bike视频序列存在目标旋转,除了CT算法,其他3种算法均能较好地完成任务,但是文中算法的精确度更高.
3) 全局、部分遮挡和快速运动.图1(e)Soccer1视频序列后半部分出现目标遮挡和快速晃动情况.CT和CSK算法的中心误差较大,当出现全部遮挡时,CT算法无法继续完成任务;当部分遮挡时,KCF算法能较好地跟踪;但是当全局遮挡时,文中算法体现了其优越性,取得了稳健的跟踪结果.
3.2性能分析
为了测试在不同条件下算法的鲁棒性,采用中心位置误差(CLE)和距离精度(DP)为评价准则.其中,中心位置误差表达式为


DP=m/n.
式中:m为CLE小于某个固定阈值(实验中均选为20 px)的图片序列帧数.
4种算法的CLE,DP的实验数据对比,如表1所示.由表1可知:文中算法能达到最优或次优性能.相对于其他3种算法,文中算法具有最优的中心位置误差和距离精度,其中,中心位置误差比KCF算法减少了21.29 px,在阈值为20的距离精度比KCF算法提高了27.9%.在Shaking和Soccer视频中,文中算法的精确度也远远高于其他3种算法,证明了文中算法的高精度和不敏感性.因此,对于强光、复杂背景等干扰,文中算法具有较高的精确度和稳定性.
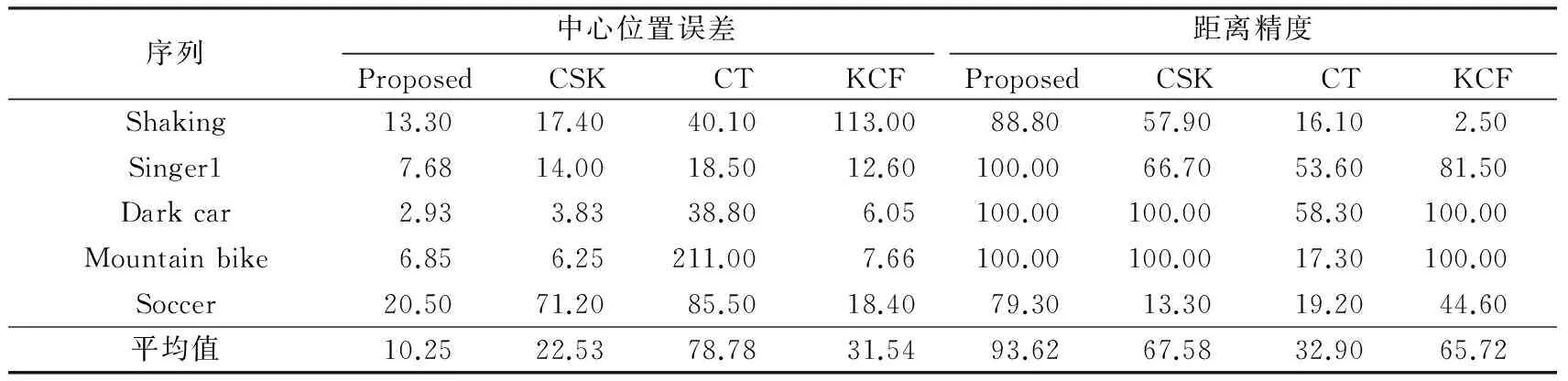
表1 中心位置误差和距离精度的比较Tab.1 Comparison with center location error and distance precision

(a) Singer1(b) Shaking(c) Dark car

(d) Soccer (e) Mountain bike图2 视频序列跟踪精度曲线图Fig.2 Tracking accuracy graph of video sequence
4 结束语
为了解决视频目标跟踪的光照敏感性和提高跟踪精度,基于核相关滤波跟踪算法提出两点改进:首先,针对核相关滤波在光照变化下,会影响跟踪精度,采用颜色属性特征,使算法具有光照不敏感性;其次,由于高维的颜色属性会增加运算复杂度,提出一种自适应降维方法,通过一种非监督学习方法达到低维特征空间,提高目标跟踪的鲁棒性和准确性.结果表明:文中算法的中心位置误差减少了21.29 px,距离精度提高了27.9%,在保留传统核相关滤波实时性好、准确度高等特点的同时,能更好地适应光照变化等情况.此外,在复杂背景下,文中算法能稳定准确地跟踪目标,具有重要的理论研究及应用价值.在未来工作中,将进一步研究如何提高文中算法的跟踪速度.
[1] 李静宇,刘艳滢,田睿,等.视频监控系统中的概率模型单目标跟踪框架[J].光学精密工程,2015,23(7):2093-2099.
[2] YANG Fan,LU Huchuan,YANG M H.Robust superpixel tracking[J].IEEE Transactions on Image Processing A Publication of the IEEE Signal Processing Society,2014,23(4):1639-1651.
[3] KALAL Z,MIKOLAJCZYK K,MATAS J.Tracking-learning-detection[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2012,34(7):1409-1422.
[4] ZHANG Kaihua,ZHANG Lei,YANG M H.Real-time compressive tracking[C]∥Proceedings of the 12th European conference on Computer Vision.Florence:Springer-Verlag,2012:864-877.
[5] CHEN Zhe,HONG Zhibin,TAO Dacheng.An experimental survey on correlation filter-based tracking[J].Computer Science,2015,53(6025):68-83.
[6] HENRIQUES J F,CASEIRO R,MARTINS P,etal.Exploiting the circulant structure of tracking-by-detection with kernels[C]∥IEEE Conference on European Conference on Computer Vision.Berlin:Springer-verlag,2012:702-715.
[7] HENRIQUES J F,CASEIRO R,MARTINS P,etal.High-speed tracking with kernelized correlation filters[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2015,37(3):583-596.
[8] 毕笃彦,库涛,查宇飞,等.基于颜色属性直方图的尺度目标跟踪算法研究[J].电子与信息学报,2016,38(5):1099-1106.
[9] BERLIN B,KAY P.Basic color terms: Their universality and evolution[M].Berkeley:UC Press,1969:11-25.
[10] ROWEIS S T,SAUL L K.Nonlinear dimensionality reduction by locally linear embedding[J].Science,2000,2290(5500):2323-2326.
[11] 冯海亮,李见为,黄鸿.自组织LLE算法及其在人脸识别的应用[J].光学·精密工程,2008,16(9):1732-1737.
[12] WU Yi,LIM J,YANG M H.Online object tracking: A benchmark[C]∥IEEE Conference on Computer Vision and Pattern Recognition.[S.l.]:IEEE Computer Society,2013:2411-2418.
(责任编辑: 黄晓楠英文审校: 吴逢铁)
ImprovedAdaptiveTargetTrackingBasedonKernelizedCorrelationFilters
HUANG Detian1,2, GU Peiting1, LIU Peizhong3, HUANG Weiqin1
(1. College of Engineering, Huaqiao University, Quanzhou 362021, China;2. College of Mechanical Engineering and Automation, Huaqiao University, Xiamen 361021, China;3. Postdoctoral Research Station of Information and Communication Engineering, Xiamen University, Xiamen 361005, China)
10.11830/ISSN.1000-5013.201606062
2016-06-21
黄德天(1985-),男,讲师,博士,主要从事机器学习、图像处理的研究.E-mail:huangdetian@hqu.edu.cn.
国家自然科学基金资助项目(61203242); 福建省泉州市科技计划项目(2014Z113)
TP 391
A
1000-5013(2017)05-0693-06
猜你喜欢
中国机械工程(2022年8期)2022-05-09
儿童时代·幸福宝宝(2021年1期)2021-03-29
小资CHIC!ELEGANCE(2019年40期)2019-12-10
电子技术与软件工程(2017年14期)2017-09-08
计算机应用(2017年4期)2017-06-27
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
航天返回与遥感(2014年5期)2014-07-31