
一种可移动式液压卸料机械手的设计
2017-10-23 03:32
福建质量管理 2017年18期
(山东科技大学机械电子工程学院 山东 青岛 266590)
一种可移动式液压卸料机械手的设计
魏国宫雪真秦敏刘西洋朱尚
(山东科技大学机械电子工程学院山东青岛266590)
随着世界的飞速发展,为了适应其发展,我国工业生产水平快速增高。随着我们人民生活水平急需提高,科学技术也要求越来越高。自动化要实现工件进行加工甚至装配等作业,已经引起人们对其的高度重视,另外自动化更要求机械手供料机构更加灵活、柔性化,更加适合运送不同的工件,因此卸料机械手在生产线上得到愈来愈广泛的应用。
移动式液压;卸料机械手
一、课题的选择背景及意义
我国是世界上发展中国家最大的,作为世界发展中国家的超级大国,社会发展水平急剧上升,目前的自动化程度满足不了现在工业的发展水平。人们生活继续改善,随着我国工业生产的飞跃发展,为了进一步控制工件在操作机床的装卸、转向、输送等迅速动作,工业作为供料、输送机构、被要求更高。需要更加灵活、柔韧性。以适应供送不同的待加工物品,这使得工业机械手愈来愈广泛的应用。
二、机械手液压系统的设计任务
(一)机械手的用途及工件重量
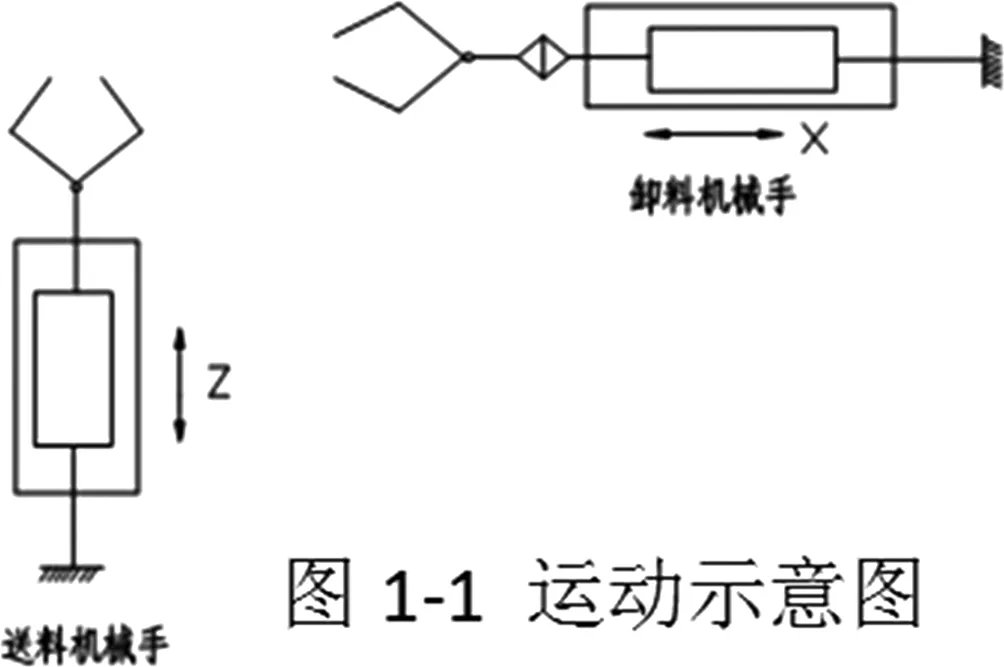
该套机械手共有两个:送料机械手与卸料机械手,分别用来实现对工件的自动安装与自动卸料。其搬运工件的重量为5N。
(二)要求机械手完成的动作过程
根据工作要求,工业机械手一般按照动作要求可分以下步骤:
步骤一:输送待加工件——由工业机械手将一个工件送到预定位置。
步骤二:预夹紧——工业机械手上将工件推入夹具上,然后机械手退回。
步骤三:寻找销孔——用力夹住工件,旋转寻找销孔。
步骤四:夹紧工件——机械手将工件推进,通过压力头将工件压紧。
步骤五:放开工件——工件被放开,加工开始。
步骤六:取下工件——加工结束后,手指将工件紧紧夹住,离开加工位置。
步骤七:重复循环——机械手重复步骤一。
由上述分析,得循环图如下:
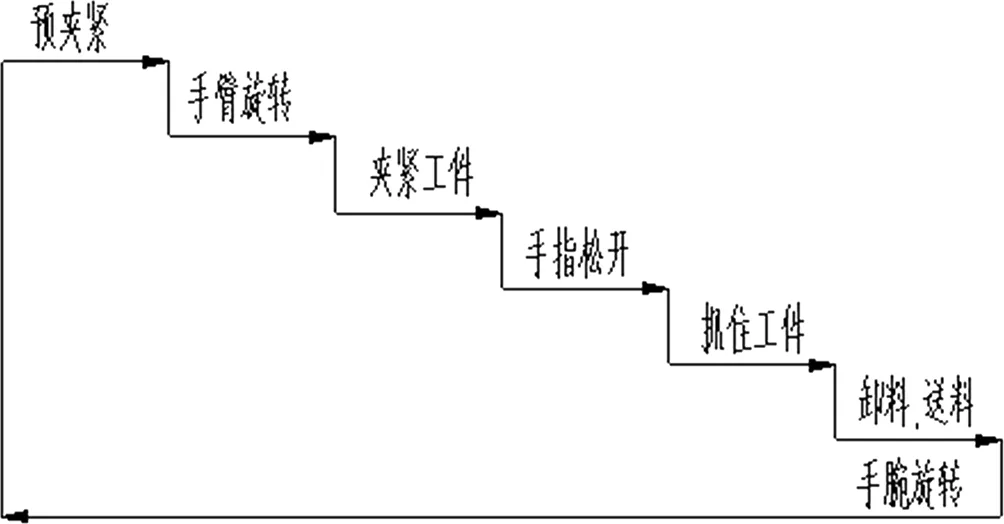
图2 运动循环图
三、机械手的总体设计
为了达到预期目的,工业机械手的设计主要对于手爪、导轨滑台、以及手臂、压缩缸的设计,总方案确定以后再对各个部分进行详细设计。
四、机械手零部件的设计
(一)手部设计计算
1.目前当今工业发展,在实际应用设计发展中,常常根据机械手运动的不同形式以及与工件配合形式情况,我们通常把将其在工厂场地的按照坐落式划分为直角式、圆柱类型、其他形式圆球式等等。我们现在选取此种方式,相比之下,更为简单,制造方便。
①初步夹紧力的确定
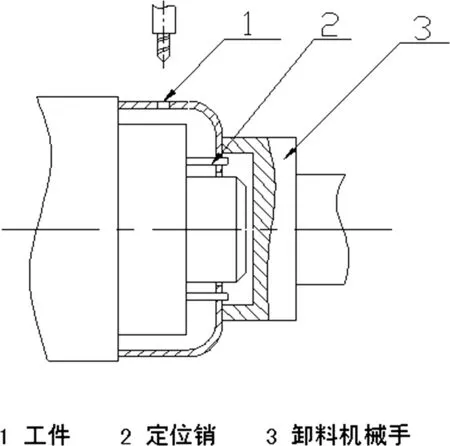
图3 加紧示意图
根据定位方式和夹具结构得出一下结论:当切削力作用于夹具支承面上,在外力作用下,抓住工件,为了准确定位工件在夹具中,以及防止工件落下,一般取夹紧力的大小为工件质量的二倍。例如工件重约10N,则取夹紧力F夹=20N,取摩擦因素f=0.1,则因夹紧力而产生的摩擦力可计算得:
F磨=F夹·f=20×0.1=2N
(4-1)
已知:弹性销的位置尺寸D1=60mm
夹具定位在直径D2=120mm,则弹性销与工件间摩擦力矩
(4-2)
工件端面与夹具定位面之间的摩擦力矩
(4-3)
M摩=M1+M2=0.06+0.12=0.18(N·m)
(4-4)
②动拉力F的计算:弹簧力F是手指的夹紧力产生直接动力,则拉力计算如下:
已计算出M摩=0.18N·m
已知工件直径D=116mm,取摩擦系数f=0.1
(4-5)
手指的夹紧力≥15.5N,符合条件。
(二)手臂摆动缸的设计
根据上述设计计算,再加以校核我们需要计算出摩擦产生的力矩M摩=0.18N·m
因此根据计算我们选择叶轮宽度b选55mm,飞叶的外筒的直径为65mm,安装的飞叶轮直径大小为28mm。
传送扭矩为:

(4-6)
所以T0>T摩,提供的传送的动能足以,可以带动正常工作。
五、总结
机械手系统的运行实验表明,该设计的机械手及液压控制系统组成并能良好的完好的预期动作系统。该机械手不但准确实现自动装、卸料,而且在加工时能实现对工件得夹紧,防止了在工件运输中脱落。
魏国(1992-),男,在读硕士,山东科技大学,研究方向振动与噪声控制。
猜你喜欢
装备制造技术(2021年1期)2021-05-21
哈尔滨轴承(2021年4期)2021-03-08
中国特种设备安全(2019年10期)2020-01-04
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年10期)2017-11-28
制造技术与机床(2017年4期)2017-06-22
通信电源技术(2016年1期)2016-04-16
肿瘤预防与治疗(2015年1期)2015-09-26
水电站机电技术(2014年1期)2014-09-26
