一种新型半主动协调控制对高速动车组曲线通过性能的影响
2017-11-06 02:29刘永强杨绍普廖英英
振动与冲击 2017年19期
刘永强, 杨绍普, 廖英英, 李 军
(1.石家庄铁道大学 机械工程学院,石家庄 050043;2.石家庄铁道大学 土木工程学院,石家庄 050043;3.河北省交通安全与控制重点实验室,石家庄 050043)
一种新型半主动协调控制对高速动车组曲线通过性能的影响
刘永强1,3, 杨绍普1,3, 廖英英2,3, 李 军1
(1.石家庄铁道大学 机械工程学院,石家庄 050043;2.石家庄铁道大学 土木工程学院,石家庄 050043;3.河北省交通安全与控制重点实验室,石家庄 050043)
针对二系横向减振器和抗蛇行减振器在进行单独控制时出现的效果单一问题,提出了一种新型半主动协调控制方法,可协调直线和曲线线路条件下的车辆综合动力学性能。建立300 km级高速动车组的动力学模型,其中二系横向和抗蛇行减振器均进行了参数化处理;构建了横向和抗蛇行减振器的半主动控制模型,并模拟了动车组通过曲线轨道时的真实工况。经过仿真对比,发现单独对横向减振器施加半主动控制时,虽然能有效提高平稳性能,但会使安全性能恶化;而单独对抗蛇行减振器进行控制时,虽然使曲线通过性能提高,但会降低横向平稳性。有鉴于此,提出了一种针对横向减振器和抗蛇行减振器的新型半主动协调控制策略。经过仿真分析,发现该新型协调控制策略可有效解决上述问题,保证列车在曲线通过时,在确保安全性能的同时具有良好的平稳性能。
高速动车组;半主动控制;横向减振器;抗蛇行减振器
高速客运列车的振动控制问题一直以来都受到关注,目前的研究中大多数都围绕二系横向减振器进行列车的横向振动控制,如刘宏友等[1]基于天棚阻尼控制原理提出了一种阻尼连续可调的半主动悬挂系统模型,并利用车辆动力学仿真软件UM进行了仿真研究。李广军等[2]利用17自由度列车模型研究了一种变论域模糊控制策略,并应用于列车横向减振器的控制。这些研究关注的重点是控制策略对乘坐舒适性和运行平稳性的影响,而忽视了对其他性能,特别是安全性的影响[3-6]。
在抗蛇行减振器的相关研究中,主要关注的热点是减振器的参数优化、对列车性能的影响等,如Wang等[7]研究了一种抗蛇行减振器的 参数变化对列车动力学性能的影响情况。何远等[8]利用SIMPACK软件研究了抗蛇行减振器的串联刚度对高速动车组运行稳定性的影响。研究中较少涉及半主动控制问题。文献[9]提出了一种抗蛇行的半主动控制策略,但也只关注于对曲线通过性能的影响情况。
本文针对二系横向减振器和抗蛇行减振器单独施加半主动控制时产生的性能单一问题,提出了一种新型的半主动协调控制策略,并进行真实曲线通过工况的模拟,验证该控制策略的有效性。
1 建 模
利用铁道车辆的多体动力学软件VI-Rail建立了单节车的动车组车辆模型,建模对象为空车状态下的某型300 km级动车组拖车车辆。模型包括车体、构架、轮对、轴箱、悬挂系统、横向止挡、轴箱定位装置等,其中悬挂系统、横向止挡和轴箱定位装置等均考虑了具有非线性特性的弹簧、阻尼器或弹性衬套等。所建模型共有18个实体部件和38个弹性部件,模型共有58个自由度,含车体、构架和轮对的沉浮、横移、伸缩、点头、摇头、侧滚等运动,以及其他部件的受限运动。按照文献[10-11]中的运动稳定性试验方法,对模型进行稳定性仿真,计算出该模型的非线性临界速度为587.5 km/h,如图1所示。该值比较接近实际,从而验证了该模型的有效性。
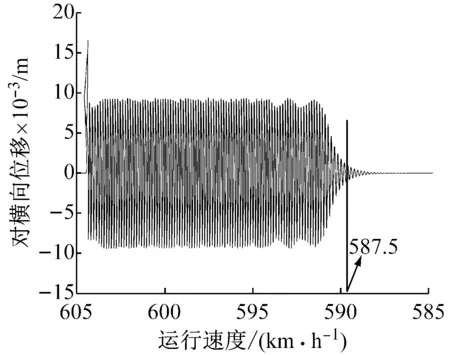
图1 单车拖车模型非线性临界速度Fig.1 Nonlinear critical speed of single trailer vehicle model
将二系横向减振器和抗蛇行减振器模型进行参数化处理,并利用Matlab/Simulink设计协调控制策略。利用VI-Rail和Matlab/Simulink之间的联合仿真接口搭建仿真模型,如图2所示。模型悬挂系统的主要技术参数如表1所示,其他参数参见文献[12]。

图2 仿真模型结构Fig.2 The construction of simulated model
对系统的二系悬挂系统进行参数化建模,将二系横向和抗蛇行减振器的阻尼系数均考虑成状态变量相关的形式,如式(1)所示。
(1)
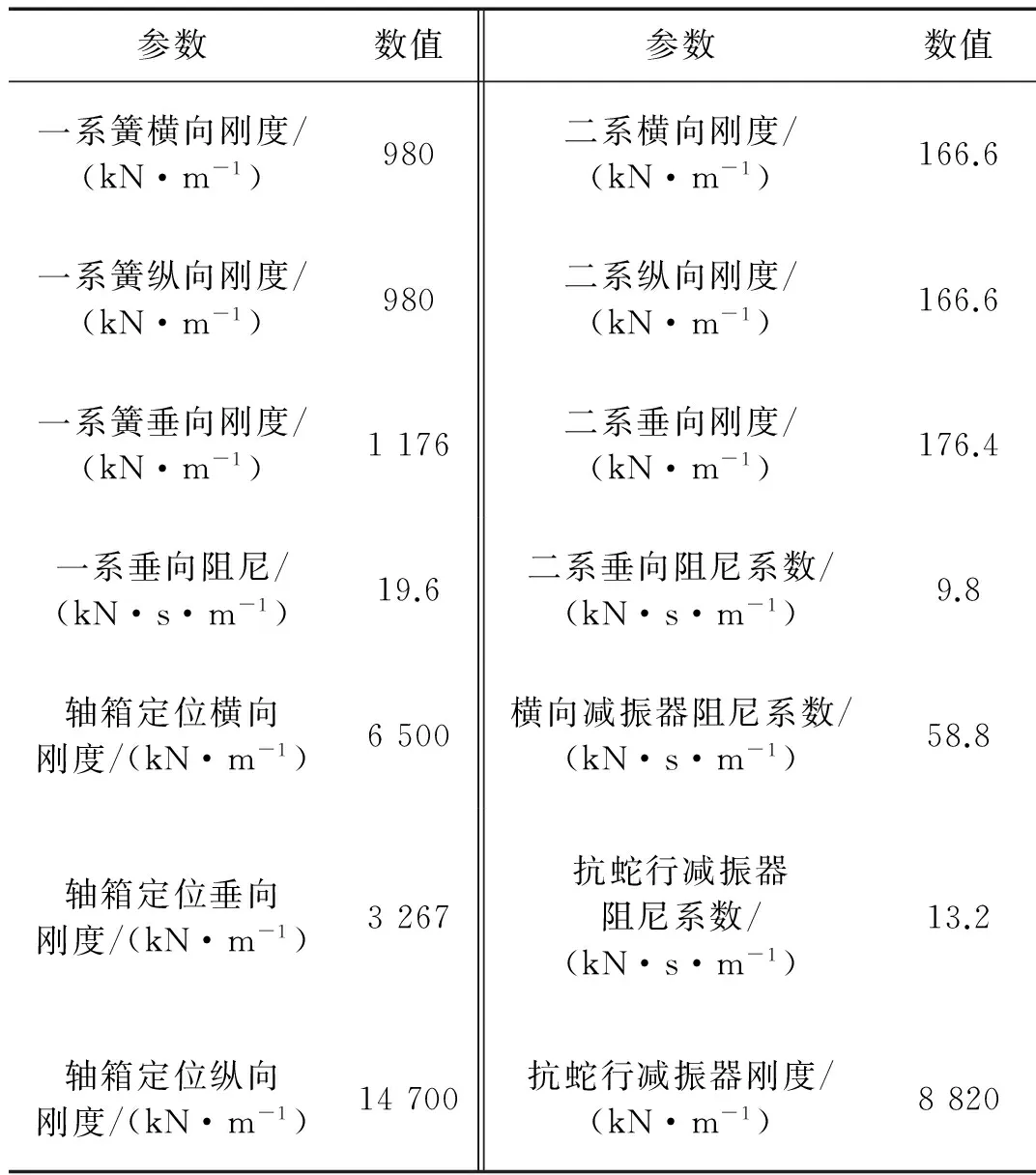
表1 动车组悬挂系统主要参数Tab.1 The main parameters of EMUs suspension system

横向和抗蛇行减振器在转向架中的位置如图3所示。

图3 横向减振器与抗蛇行减振器的位置Fig.3 The location of lateral dampers and yaw dampers in bogie
2 半主动控制策略设计
2.1横向减振器的控制
文献[13]对横向减振器进行半主动控制,控制策略采用天棚阻尼控制,如式(2)所示。
(2)
式中,fsky为天棚减振器输出的阻尼力,表达式如式(3)所示。
(3)

fMR max和fMR min分别为减振器所能输出的最大和最小阻尼力,其公式如式(4)所示。
(4)
本文采用的横向减振器最大阻尼系数cMR max=18 000 N·s·m-1,最小阻尼系数cMR min=6 000 N·s·m-1。
2.2抗蛇行减振器的控制
刘永强等对抗蛇行减振器进行半主动控制,采用“开关”式控制策略,在直线轨道和曲线轨道上采用不同的阻尼系数,控制策略如式(5)。
(5)
式中:cmax和cmin分别为抗蛇行减振器所能提供的最大和最小阻尼系数,本文采用的减振器取值为cmax=175 000 N·s·m-1,cmin=13 200 N·s·m-1;z为动车组通过曲线轨道时车体两侧高度差,可通过在车体两侧各加装一个直线位移传感器获得,测量示意图如图4所示;Δz为判断直线或曲线轨道的车体两侧高度差的标准值,该值可通过仿真测试获得。

图4 车体两侧高度差示意图Fig.4 The sketch of height difference on both sides of the carbody
2.3新型横向-抗蛇行减振器协调控制策略
如果将横向减振器和抗蛇行减振器同时施加于动车组列车中,需要设计专门的控制策略。其中,横向减振器仍旧采用式(2)所示的控制策略。
对于抗蛇行减振器的控制,可按照天棚阻尼的原理进行设计:假设存在一个虚拟的“天棚”,在车体与“天棚”之间沿车体方向安装一个减振器,用于抑制车体的摇头运动,如图5所示。
图5中的减振器在实际中是不存在的,需要在车体和构架之间设置,即抗蛇行减振器。为了保证转向架的运动稳定性,就必须依赖车体,通过车体对构架的蛇行运动约束,来保证转向架的运动稳定性,其途径主要通过抗蛇行减振器来实现[14]。抗蛇行减振器的参数对列车运动稳定性的影响很大[15]。

图5 虚拟“天棚”抗蛇行减振器示意图Fig.5 The diagram of sky-hook yaw damper
根据式(5)所示的切换条件,将天棚阻尼控制的概念引入抗蛇行减振器的控制中,将抗蛇行减振器的控制策略设计成如式(6)所示的形式。
(6)

最终的控制系统,可实现在直线线路上只执行式(2)所示的横向减振器的半主动控制;在曲线线路上,既执行横向减振器半主动控制,又执行式(6)所示的抗蛇行半主动控制。系统整体控制示意图如图6所示,其中SLD(Semi-active Lateral Damper)表示横向减振器半主动控制,SYD(Semi-active Yaw Damper)表示抗蛇行半主动控制。
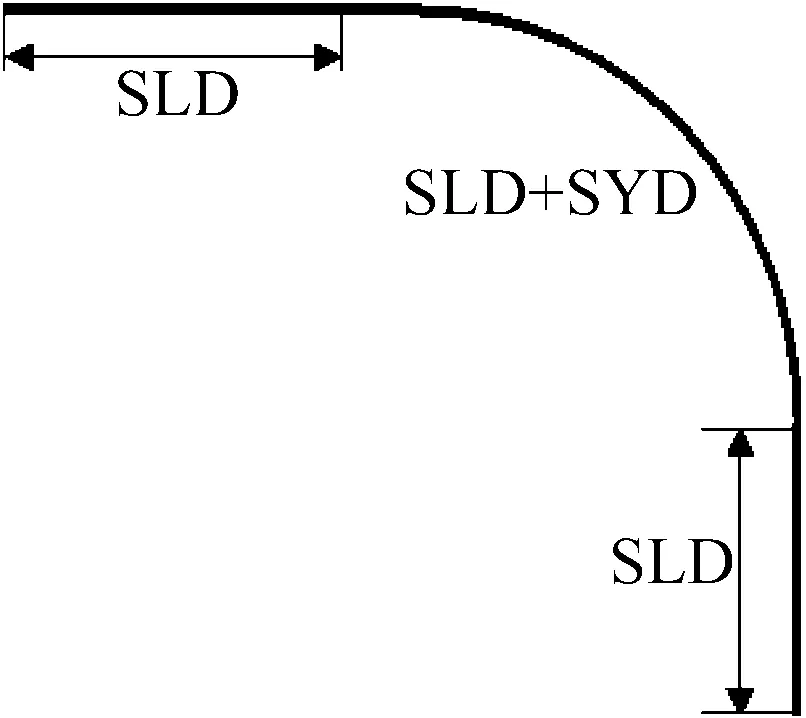
图6 系统整体控制示意图Fig.6 The sketch of whole control system
3 动力学仿真分析
3.1仿真工况
为对比半主动控制的效果,对动车组车辆模型进行半主动控制。曲线线路设计为:首先经过950 m的直线段,沿缓和曲线行驶至1 190 m的位置,然后在曲线半径为7 000 m,轨道超高为150 mm的曲线上行驶到2 630 m,接着再经过缓和曲线至2 890 m,最后在直线段内行驶至4 000 m处。采用德国高干扰谱激励,运行速度分别为200 km/h、220 km/h、240 km/h、260 km/h、280 km/h和300 km/h。仿真时长50 s,步长0.001 s。
横向减振器天棚阻尼系数c0按表1取为58 800 N·s·m-1,车体两侧高度差阈值Δz经仿真测试设置为0.01 m,计算方法参见文献[9]。
3.2仿真结果分析
单独对横向减振器施加半主动控制(SLD控制)后,对动车组模型进行仿真,图7为200 km/h速度时被动悬挂和SLD控制下车体横向加速度的时域曲线,其他速度等级仿真结果不再赘述。

(a) 被动悬挂

(b) SLD控制图7 被动及SLD控制下车体横向加速度时域对比Fig.7 Lateral ride index under passive and SLD control when the speed is 200 km/h
根据平稳性指标计算方法,计算被动悬挂和SLD控制下的车体横向平稳性指标,如图8所示。从图8中可以看出,相对于被动悬挂,SLD控制策略极大地提高了车体的横向平稳性,横向平稳性指标大幅下降,且降低幅度随速度的增大而逐渐增大,最大降幅超过20%。
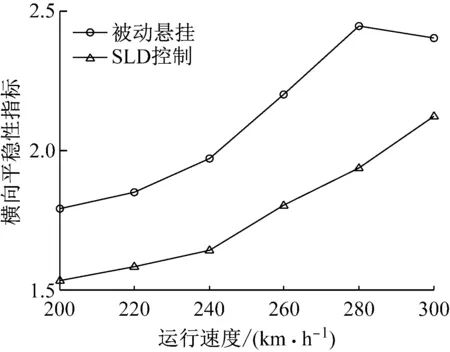
图8 横向减振器半主动控制对横向平稳性的影响Fig.8 The effect of semi-active of lateral damper on lateral ride index of vehicle
图9为200 km/h速度时被动悬挂和SLD控制下模型脱轨系数随时间变化情况,其他速度等级仿真结果不再赘述。计算不同速度等级下模型的最大脱轨系数情况,如图10所示。
图10暴露出了SLD控制策略的缺点:安全性指标变得不稳定,虽然在运行速度超过240 km/h后脱轨系数有所降低,但在速度小于240 km/h时脱轨系数有所恶化。
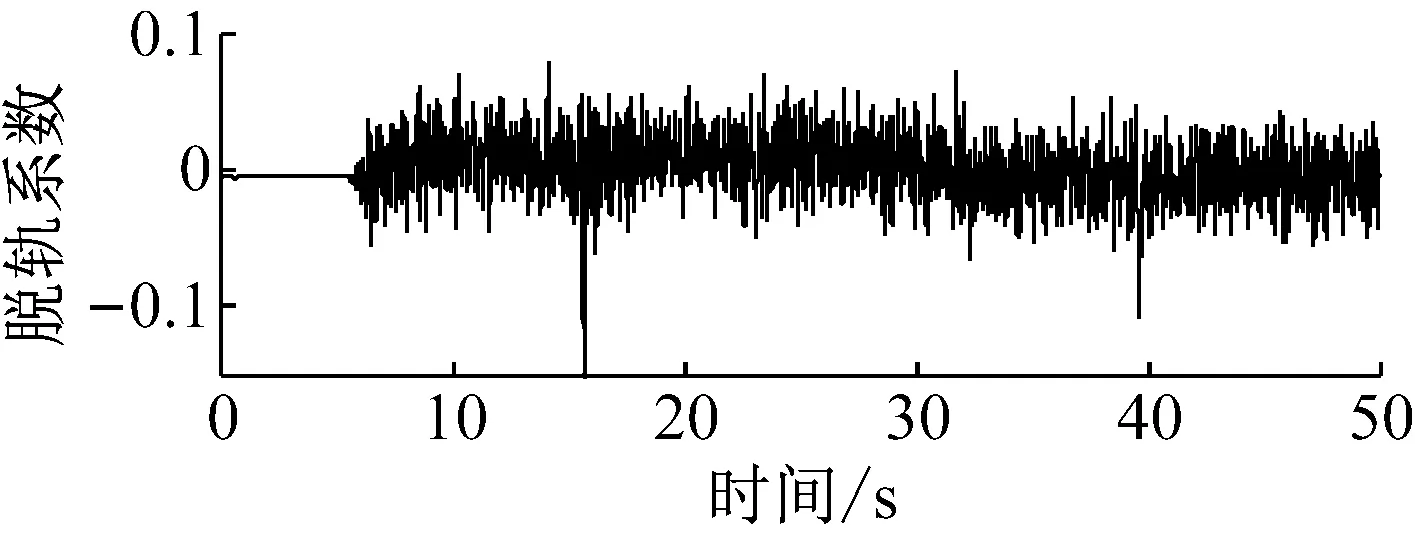
(a) 被动悬挂
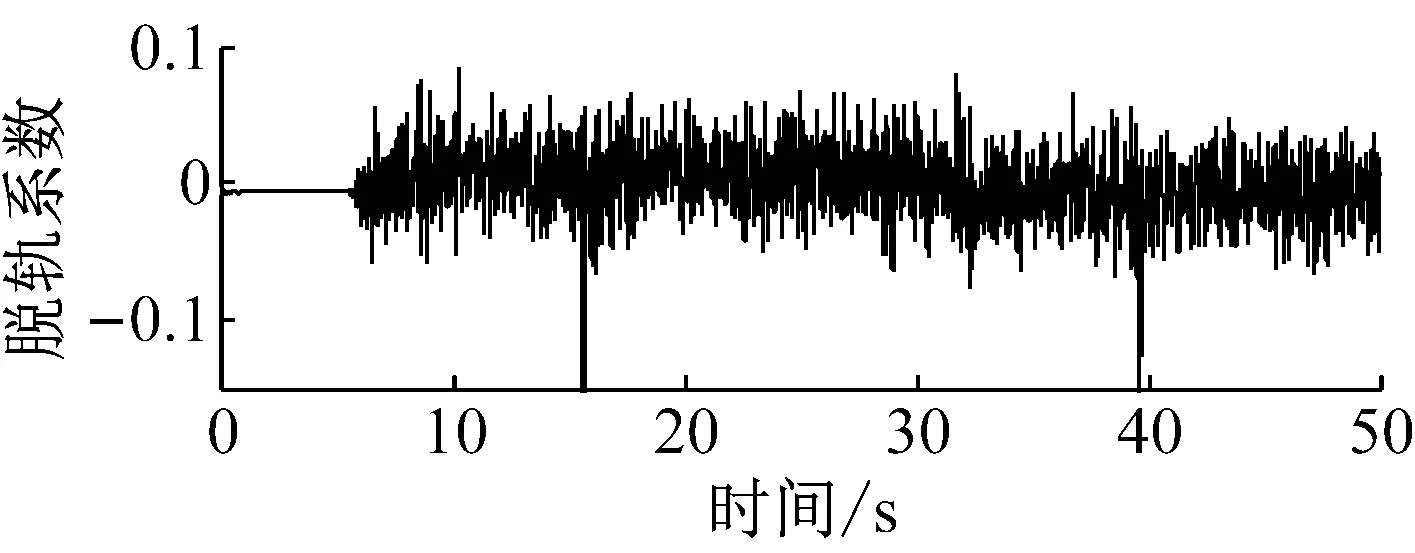
(b) SLD控制图9 被动及SLD控制下模型脱轨系数时域对比Fig.9 Model derailment index under passive and SLD control when the speed is 200 km/h

图10 横向减振器半主动控制对安全性的影响Fig.10 The effect of semi-active of lateral damper on safety index of vehicle
单独对抗蛇行减振器施加半主动控制后,仿真计算控制策略对动车组曲线通过时横向平稳性和安全性指标的影响,如图11和图12所示。

图11 抗蛇行减振器半主动控制对横向平稳性的影响Fig.11 The effect of semi-active of yaw damper on lateral ride index of vehicle
从图12可知,SYD控制可降低车辆的脱轨系数,且降低幅度随速度增加而增大,最大降幅可达35%。但从图11可以发现,抗蛇行半主动控制施加后,车体的横向平稳性指标均高于被动悬挂,这表明式(5)所示的控制策略会恶化车辆的平稳性能,这是单独使用SYD控制的缺点。
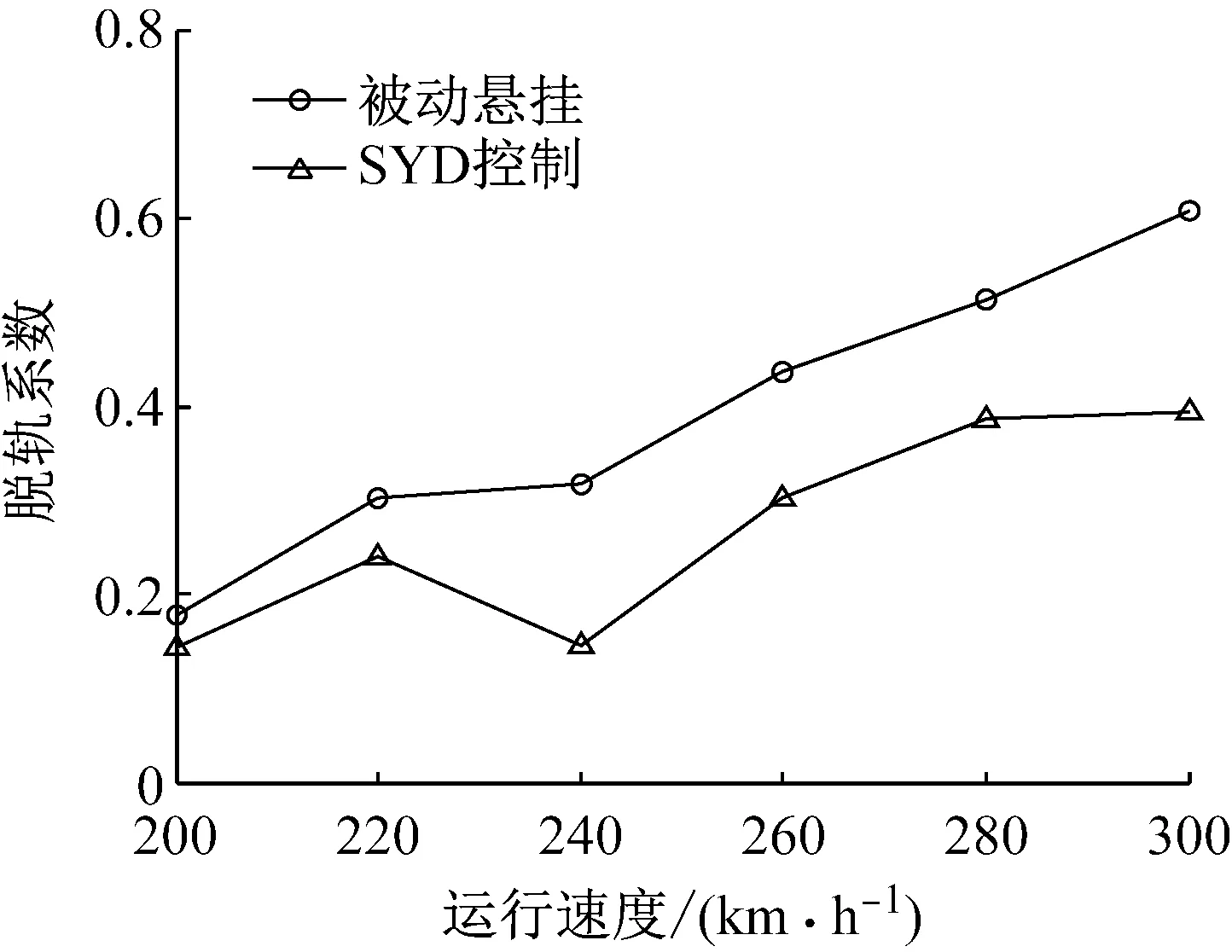
图12 抗蛇行减振器半主动控制对安全性的影响Fig.12 The effect of semi-active of yaw damper on safety index of vehicle
对于以上两种控制策略单独使用时出现的负面问题,提出了式(6)所示的新型SLD-SYD协调控制策略。通过仿真,分析了新型控制策略对动车组曲线通过时横向平稳性和安全性的影响,如图13和图14所示。

图13 新型协调控制对横向平稳性的影响Fig.13 The effect of new combination control on lateral ride index of vehicle

图14 新型协调控制对安全性的影响Fig.14 The effect of new combination control on safety index of vehicle
从图13可知,新型协调控制策略施加后,车体的横向平稳性指标与被动悬挂相比有了明显降低,且控制效果接近SLD控制效果,最大降幅达15%。从图14可以发现,与被动悬挂、SLD控制和SYD控制相比,新型的SLD-SYD控制下车辆的脱轨系数最低,在300 km/h时脱轨系数只有0.37左右。由此可见,新型SLD-SYD控制策略既可以保证良好的安全性能,又能得到优秀的横向平稳性能。
4 结 论
建立了300 km级高速动车组模型,针对二系横向减振器和抗蛇行减振器单独进行控制时所产生的负面作用,提出了一种新型协调控制策略,经过仿真分析取得了良好的控制效果。主要结论如下:
(1) 单独对横向减振器施加半主动控制后,与被动悬挂相比,车辆的横向平稳性提高,安全性降低。
(2) 单独对抗蛇行减振器施加半主动控制后,与被动悬挂相比,车辆的安全性提高,横向平稳性降低。
(3) 新型协调控制策略可将横向减振器和抗蛇行减振器同时施加控制,与被动悬挂、横向减振器控制和抗蛇行减振器单独控制相比,新型控制策略无论在横向平稳性还是安全性方面均取得良好的效果。
[1] 刘宏友, 曾京, 李莉, 等. 高速列车二系横向阻尼连续可调式半主动悬挂系统的研究[J]. 中国铁道科学, 2012, 33(4): 69-74.
LIU Hongyou, ZENG Jing, LI Li, et al. Study on secondary lateral continuous adjustable damping semi-active suspension device for high-speed train[J]. Chinese Railway Science, 2012, 33(4): 69-74.
[2] 李广军, 金炜东, 陈春俊. 列车横向半主动悬挂系统变论域模糊控制[J]. 光学精密工程, 2013, 21(12): 3298-2206.
LI Guangjun, JIN Weidong, CHEN Chunjun. Variable universe fuzzy control of train lateral semi-active suspension system[J]. Optics and Precision Engineering, 2013, 21(12): 3298-2206.
[3] 马新娜, 杨绍普, 邸书灵. 基于磁流变阻尼器的高速机车横向半主动振动控制研究[J]. 振动与冲击, 2009, 28(7): 126-130.
MA Xinna, YANG Shaopu, DI Shuling. Semi-active lateral vibration control of a high-speed locomotive based on MR damper[J]. Journal of Vibration and Shock, 2009, 28(7): 126-130.
[4] KWAK M K, LEE J H, YANG D H, et al. Hardware-in-the-loop simulation experiment for semi-active vibration control of lateral vibrations of railway vehicle by magneto-rheological fluid damper[J]. Vehicle System Dynamics, 2014, 52(7): 891-908.
[5] KIM H C, CHOI S B, LEE G S, et al. Performance analysis of a semi-active railway vehicle suspension featuring MR dampers[C]//SPIE Smart Structures and Materials Nondestructive Evaluation and Health Monitoring. [S.l.]: International Society for Optics and Photonics, 2014: 905711.
[6] SHIN Y J, YOU W H, HUR H M, et al. H∞ control of railway vehicle suspension with MR damper using scaled roller rig[J]. Smart Materials and Structures, 2014, 23(9): 95023-95034.
[7] WANG W L, YU D S, HUANG Y, et al. A locomotive’s dynamic response to in-service parameter variations of its hydraulic yaw damper[J]. Nonlinear Dynamics, 2014, 77(4): 1485-1502.
[8] 何远, 王勇. 抗蛇行减振器串联刚度对高速动车组运行稳定性的影响[J]. 机车电传动, 2015 (3): 26-29.
HE Yuan, WANG Yong. Influence of anti-yaw damper series stiffness on running stability of high-speed EMUs[J]. Electric Drive for Locomotive, 2015 (3): 26-29.
[9] 刘永强, 廖英英, 杨绍普, 等. 一种抗蛇行减振器控制系统在高速动车组中的仿真应用[J]. 石家庄铁道大学学报(自然科学版), 2015, 28(2): 68-72.
LIU Yongqiang, LIAO Yingying, YANG Shaopu, et al. Simulation application of a way control system in high-speed electric multiple units[J]. Journal of Shijiazhuang Tiedao University (Natural Science), 2015, 28(2): 68-72.
[10] 中华人民共和国铁道部. 机车车辆动力学性能台架试验方法:TB/T 3115—2005[S]. 北京:中国铁道出版社, 2005.
[11] 廖英英,刘金喜,刘永强,等. 半主动控制与时滞对高速铁道车辆平稳性、稳定性及安全性的影响[J]. 振动与冲击,2011,30(6):58-62.
LIAO Yingying, LIU Jinxi, LIU Yongqiang, et al. Effects of semi-active control and time delay on riding quality, running stability and safety of high-speed railway vehicle[J]. Journal of Vibration and Shock, 2011,30(6):58-62.
[12] 刘永强. 基于磁流变阻尼器的高速动车组半主动控制与时滞分析[D]. 北京:北京交通大学, 2011.
[13] 刘永强,杨绍普,廖英英. 高速动车组悬挂系统横向半主动控制仿真分析[J]. 振动与冲击, 2010, 29(9): 51-54.
LIU Yongqiang, YANG Shaopu, LIAO Yingying. Simulation analysis on lateral semi-active control of suspension system for high-speed EMUs[J]. Journal of Vibration and Shock, 2010, 29(9): 51-54.
[14] 张卫华, 李艳, 宋冬利. 高速列车运动稳定性设计方法研究[J]. 西南交通大学学报, 2013, 48(1):1-9.
ZHANG Weihua, LI Yan, SONG Dongli. Design methods for motion stability of high-speed trains[J]. Journal of Southwest Jiaotong University, 2013, 48(1):1-9.
[15] 吴娜, 曾京, 王亦佳. 轮轨磨耗状态下悬挂参数失效对车辆动力学性能的影响[J]. 振动与冲击, 2015, 34(5): 82-87.
WU Na, ZENG Jing, WANG Yijia. Effect of wheel /rail wear and suspension system failure on vehicle dynamic performance[J]. Journal of Vibration and Shock, 2015, 34(5): 82-87.
Newsemi-activecombinationcontrolanditseffectonthecurvingperformanceofEMUs
LIU Yongqiang1,3, YANG Shaopu1,3, LIAO Yingying2,3, LI Jun1
(1. School of Mechanical Engineering, Shijiazhuang Tiedao University, Shijiazhuang 050043, China; 2. School of Civil Engineering, Shijiazhuang Tiedao University, Shijiazhuang 050043, China;3.Key Laboratory of Traffic Safety and Control in Hebei, Shijiazhuang 050043, China)
A new semi-active combination control technique was proposed to coordinate the semi-active lateral damper (SLD) control and semi-active yaw damper (SYD) control. The dynamic model of a 300 km electric multiple units (EMUs) was built, including the parameterized models of SLD and SYD. At first, the semi-active control strategy was realized by using individually the model of SLD or SYD, and some curve-passing conditions of EMUs were simulated. Comparing the results of the two types of controls, it is found that the SLD control can improve the lateral ride index of vehicle but may worsen the safety index, and the SYD control can improve the safety index but may worsen the lateral ride index. Finally, a new SLD-SYD combination control strategy was proposed and applied in the EMUs model. The simulation results show that the new control strategy can improve the safety index and lateral ride index at the same time.
electric multiple units; semi-active control; lateral damper; yaw damper
U270.1
A
10.13465/j.cnki.jvs.2017.19.025
国家自然科学基金(11472179;U1534204;11572206;11302137);河北省自然科学基金(A2015210005);河北省教育厅项目(YQ2014028);河北省人才工程培养经费资助科研项目(A2016002036)
2016-10-08 修改稿收到日期:2016-12-12
刘永强 男,博士,副教授,博士生导师,1983年12月生
猜你喜欢
军民两用技术与产品(2021年1期)2021-07-28
装备制造技术(2020年11期)2021-01-26
科技与创新(2020年19期)2020-10-09
铁道通信信号(2020年6期)2020-09-21
现代商贸工业(2020年24期)2020-07-17
铁道运营技术(2020年2期)2020-04-08
电子技术与软件工程(2018年6期)2018-02-23
科学与财富(2017年12期)2017-05-16
汽车工程学报(2015年6期)2016-03-23
中国石油大学学报(自然科学版)(2015年2期)2015-11-10