
基于LabVIEW的助力轮椅车的智能控制及检测系统研究
2017-11-21 03:03
传感器世界 2017年6期
国家知识产权局专利局专利审查协作天津中心,天津 300304
一、引言
据普查数据显示,我国下肢残疾人士与老龄人口(60岁以上)占全国人口总数比可高达16.12%。这些人群面临着出行或者行动不便的困境,由此带来了一系列的社会问题。在此背景下,智能轮椅发展迅速,为肢体残疾与行动不变的老人提供了诸多便利[1],助力轮椅车是其中之一。
助力轮椅车和普通手推轮轮椅操作一样,但是由电机为使用者提供助力。使用者只需向前推动一下手推轮,驱动系统就会产生一定的持续助力来驱动轮椅前行;通过对手推轮刹车,根据刹车力大小,驱动系统就会减速或停止。前行过程中对某个车轮进行轻轻刹车,就能实现转向[2]。此控制方式让使用者适度活动上肢以保持其肩周的健康状态,同时由于有助力的存在又避免使用者肩膀和关节的过度使用而产生疲劳。此外,助力的存在使轮椅快速、轻松行驶在草地、地毯等不良路况之上,而且帮助其轻松爬坡。相比于市场上流行的操控杆式电动轮椅,这款产品具有显著的优点:保障驱动动力的同时,在操控方式上的创新,不仅让使用者肩周得到锻炼,而且具有一定的休闲性。助力轮椅车整体模型如图1所示。
由于人手的力不能保证左右手完全相同、有障碍物对其中一支动力轮产生了阻碍、使用者误操作等原因,左、右两套独立的力觉传感系统会产生不同的力觉信号,从而造成应该直行的轮椅车转向甚至急速掉头,给使用者带来麻烦,甚至产生事故,对使用者造成二次伤害。

针对助力轮椅车存在的不足,介绍了一种基于LabVIEW设计的助力轮椅车的智能控制及检测系统。系统采用LabVIEW对两轮的力觉系统进行数据采集、数据分析及显示,并发出控制信号控制左、右轮运转。针对轮椅直线运行时遇到的左右手完全相同、有障碍物对其中一支动力轮产生了阻碍、使用者误操作等状况,进行力觉传感系统和左右驱动轮状态的实时显示,并将数据进行存储,对数据进行分析后将其作为直行的特殊情况写入控制系统,从而避免了轮椅车的误动作。
二、助力轮椅车的组成及运动原理
助力轮椅车驱动系统通过力觉传感器系统探测使用者通过手推轮给系统的初始力大小、速度大小综合控制直流驱动电机的输出功率,经过一定的运算处理后,由控制器产生PWM波形控制直流驱动电机,合理调整直流驱动电机的输出功率,实现对轮椅的综合驱动[3]。
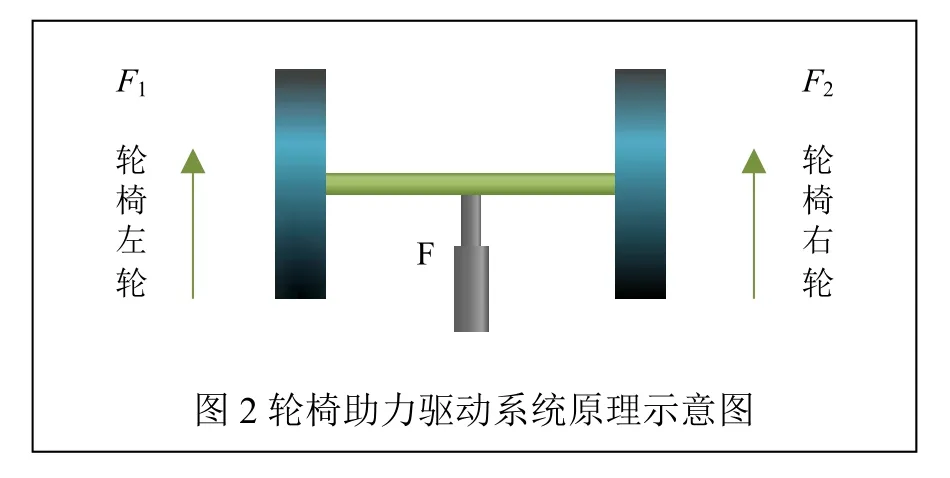
轮椅助力驱动系统原理示意图如图2所示。左、右轮由独立的驱动系统进行驱动,当F1=F2时,轮椅直行;当F1〉F2时,轮椅右转;当F1<F2时,轮椅左转;F1和F2始终具有一个向前的合力F。
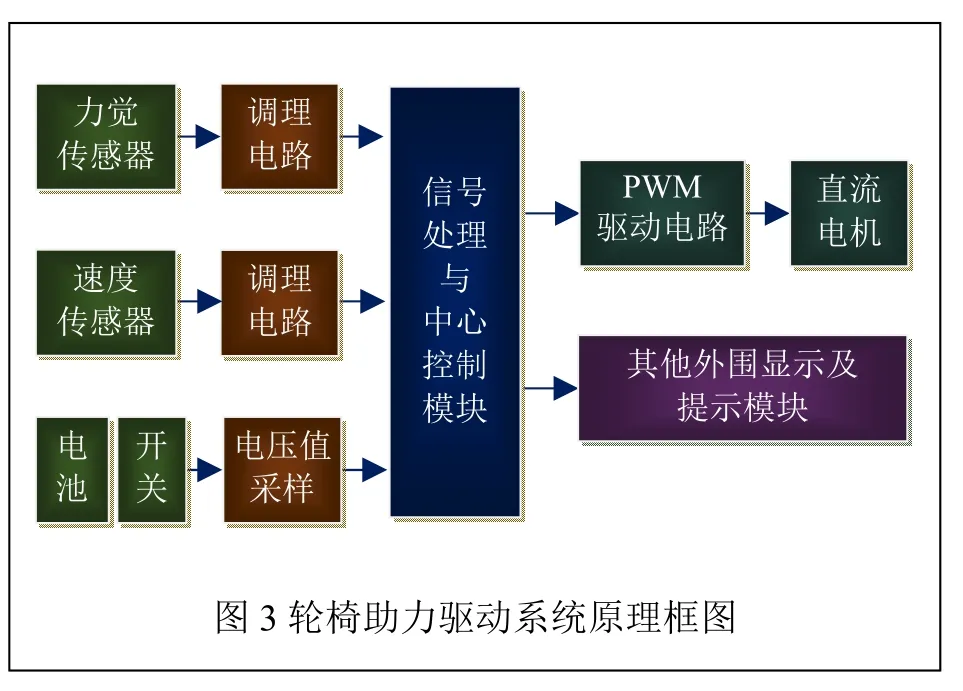
为了实现助力功能,整个系统包括以下模块:力觉传感模块、轮速采集模块、信号处理与中心控制模块、动力驱动模块。系统原理框图如图3所示。[4]
力觉传感系统的主要方式[2-6]:
(1)为了采集使用者作用在手推轮上的力矩大小,因为有F=ma,加速度正比于力,所以可以通过采集加速度替代力的采集,所以选取了角加速度传感器实时采集使用者推动轮椅时产生的加速度,角加速度传感器与轮椅助力驱动系统的直流驱动电机连接在一起,以实现同步运转,实时采集加速度的变化,作为输入信号;
(2)采用扭矩传感器直接采集使用者施加在手推轮上的力,通过传送器传送至信号处理中心进行处理,实现力觉采集;
(3)采用角度传感器将手推轮相对于车轮的偏转角度作为使用者施力的信号进行采集,通过传送器传送至信号处理中心进行处理,实现力觉采集;
(4)通过压力传感器采集手推轮相对于车轮的偏转时作用在轮毂内的力作为使用者施力的信号进行采集,通过传送器传送至信号处理中心进行处理,实现力觉采集。
轮速采集系统速度采集并传送至计算机后,此速度数据一方面传输至基于LabVIEW的助力轮椅车的智能控制及检测系统进行显示、分析、处理,另一方面实时监控轮椅车的运转速度,当轮速超过10km/h后,启动保护程序,对轮椅进行降速处理。
三、基于LabVIEW的控制及检测系统设计
1、系统构成
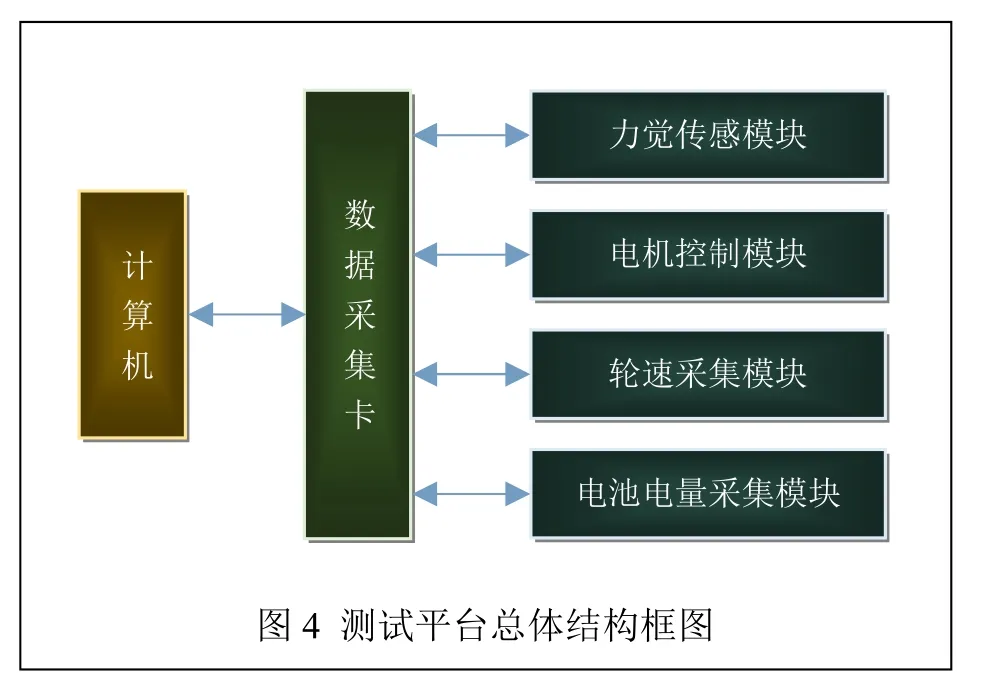
测试平台总体结构框图如图4所示。系统的数据采集、控制利用LabVIEW应用软件,通过NI数据采集卡进行。整个系统包括七个控制对象,分别是:左、右力觉传感模块、电机控制模块、转速采集模块、电池电量采集模块、DC程控电源模块。
2、前面板
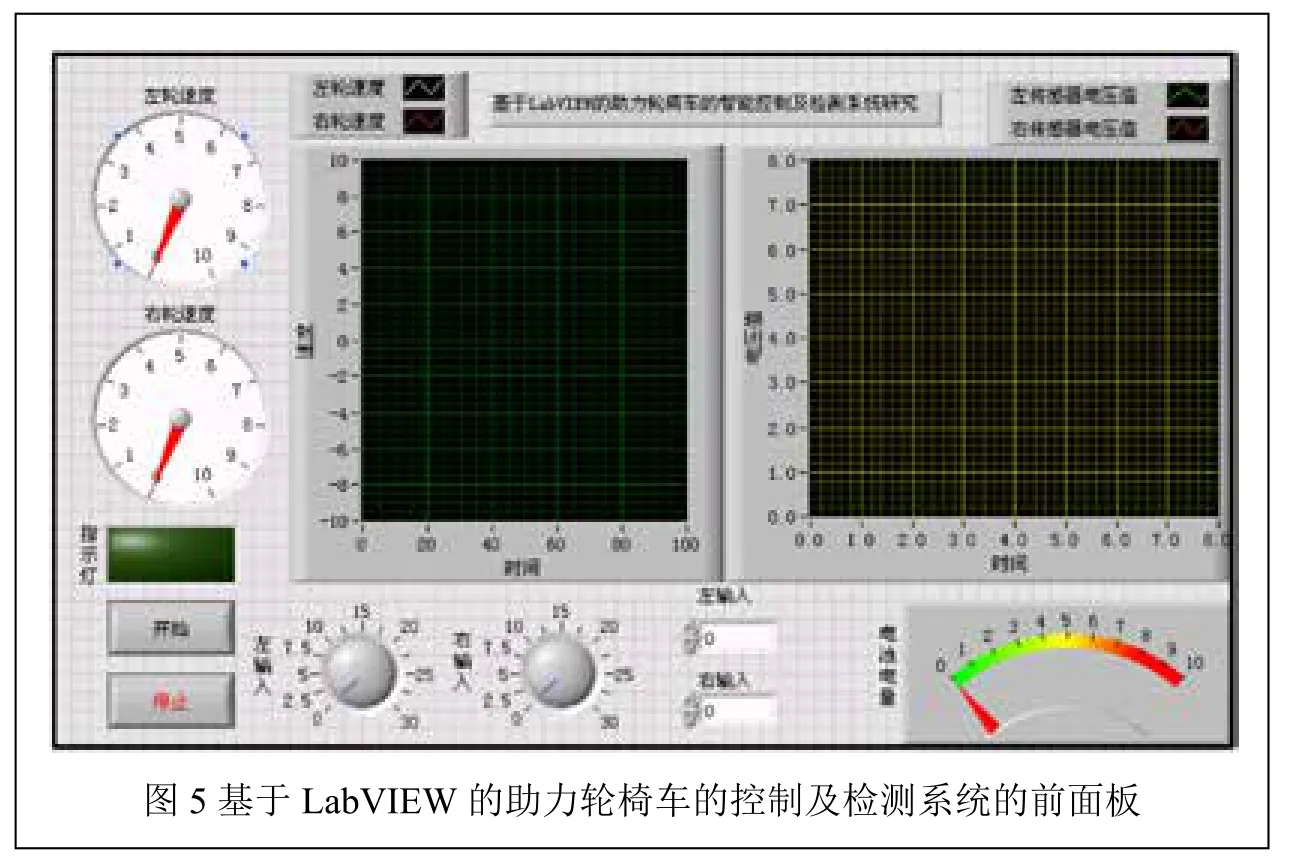
系统的前面板如图5所示,具有模拟控制输入部分和显示部分。模拟控制输入部分包括系统的启动和停止按钮,左、右轮的模拟力输入。轮的模拟力输入分为旋钮式和数字输入式输入,数字输入式输入可以输入精确的模拟力从而可以用来调试电机的控制,旋钮式输入可以逼真的模拟助力轮椅车的力量输入,可以更好地模拟实际人力输入。显示部分包括左、右轮车速显示、力觉系统采集到的信号显示、电池电量显示和运行状态指示灯。车速显示分为曲线显示和仪表显示。
3、主程序设计
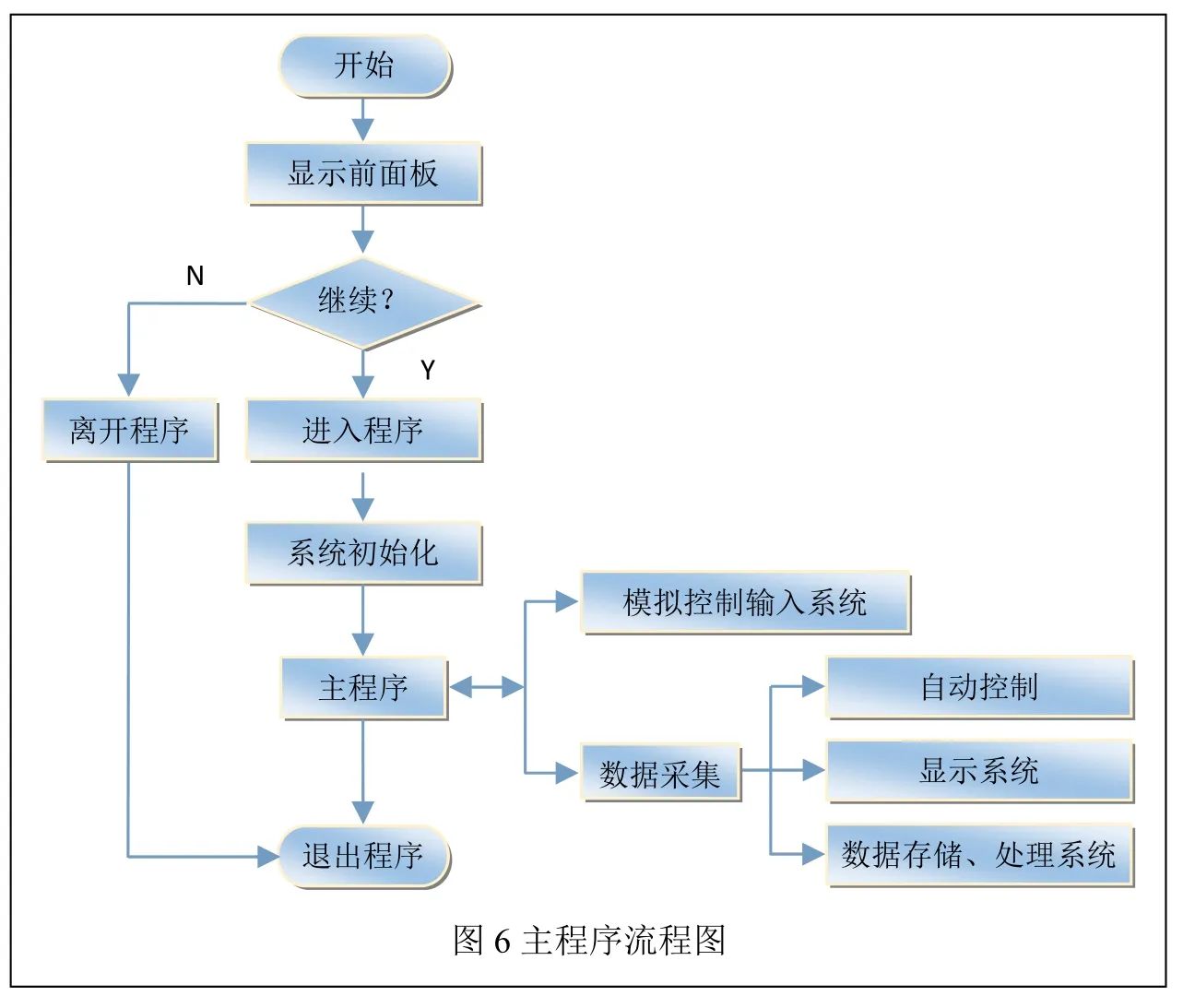
主程序流程如图6所示。主程序的流程通过事先驱动的方式调用其他的模块。当主程序运行时,首先进入前面板界面,点击“开始”按钮后,经过一系列初始化后,系统开始运行,当用户开始使用轮椅车,数据采集模块同步采集信号,系统响应并对轮椅进行相应的控制,同时将检测结果在前面板显示并自动存入数据库;当通过操作前面板上的旋钮或数字输入窗口时,即可调用模拟控制输入系统,实现模拟实际人力输入进而完成轮椅车的控制。
四、结语
研制的基于LabVIEW的助力轮椅车的控制及检测系统,通过实时显示,针对轮椅直线运行时遇到的左右手完全相同、有障碍物对其中一支动力轮产生了阻碍、使用者误操作等状况进行力觉传感系统和左右驱动轮状态的实时显示并将数据进行存储,对数据进行分析后将其作为直行的特殊情况写入控制系统,有效地解决了因受力不均而产生的两轮动力不平衡,避免了轮椅车误动作对使用者造成二次伤害的问题,而且 操作方式与普通手动轮椅的方式相同,操作简单,使用户的上肢得到一定的锻炼,可以有效缓解残障用户的上肢萎缩的症状,具有良好的市场应用前景。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
电脑报(2021年21期)2021-08-19
数学小灵通·3-4年级(2020年3期)2020-06-24
新世纪智能(高一语文)(2019年10期)2020-01-13
电脑报(2019年28期)2019-09-10
电脑报(2019年29期)2019-09-10
电子制作(2018年23期)2018-12-26
天津诗人(2017年2期)2017-11-29
爆笑show(2015年5期)2015-07-09
