基于多特征多神经网络融合的目标识别技术*
2017-12-18 06:16单连平刘义海
指挥控制与仿真 2017年6期
蒋 攀, 单连平, 刘义海
(江苏自动化研究所, 江苏 连云港 222061)
基于多特征多神经网络融合的目标识别技术*
蒋 攀, 单连平, 刘义海
(江苏自动化研究所, 江苏 连云港 222061)
针对决策级融合识别中各单源识别结果高度冲突或拒判时目标综合识别结果不够准确的问题,提出了一种基于目标融合特征和多神经网络融合的识别方法,该方法首先应用遗传算法融合目标的多种特征,其次使用装袋方法独立地构建多个神经网络,并提出蒙特卡洛随机融合法融合多神经网络的识别结果,实验结果表明该方法能够通过两级融合提升目标识别的准确率和稳定性。
目标识别; 遗传算法; 融合特征; 多神经网络; 蒙特卡洛随机融合法
目标综合识别是通过融合各类传感器探测到的目标信息,充分利用相互之间的互补和冗余性,得到目标身份信息的过程[1]。准确稳定的目标识别是战场态势评估和威胁判断的基础,也是联合作战和精确打击的前提。
目前,目标综合识别的方法已有较多文献研究,最常用的手段是在决策级进行融合,即基于不同的单源特征使用不同的分类器进行识别,然后对单源识别结果按照一定的策略进行融合完成目标综合识别[2-3]。这种方式虽然简单有效,但存在如下问题:1)由于单源识别导致目标有效信息损失较多,因而当单源识别结果高度冲突或有部分单源识别拒判时,决策层融合后得到的结果不够准确;2)当所有单源均出现拒判情形时,决策级融合识别无法进行。文献[4-5]考虑特征级融合,先提取出了目标的多种特征量,并按照一定的方法对提取到的多种特征量进行融合,得到具有较强区分性的融合特征量,再使用分类器识别目标。这种方式虽然避免了决策级融合中有效信息损失过多的问题,但在识别目标时通常使用单一分类器,很少考虑多分类器融合方法,容易受到噪声和过拟合影响。
本文针对上述决策级融合和特征级融合方法的不足,研究了一种基于目标融合特征和多神经网络融合的识别策略,即融合目标的多种特征提升每个神经网络的识别准确率,融合多个神经网络的识别结果来改善目标识别的稳定性。
1 目标特征融合
单个传感器提取的特征由于其自身的探测特点不能获得目标的完全描述,利用多种异类传感器提取的独立互补的特征进行识别往往有利于降低误识别率。但异类传感器提供的目标数据通常存在结构各异、形式多样等特点,为了实现多样异构数据的统一利用,必须采用有效的特征级融合算法来生成目标的融合特征数据集。遗传算法(Genetic Algorithm,GA)是建立在自然选择和遗传变异基础上的利用随机化技术来指导的自适应概率性搜索算法。其高效搜索性和强鲁棒性能够快速求得全局最优解,此外,遗传算法的编码方式十分契合目标特征融合的应用。
本文首先从目标图像中提取了Hu不变矩特征和仿射不变矩特征[6],将其与目标运动特征和目标的电磁辐射特征组成目标的原始特征空间,然后使用遗传算法对目标原始特征进行融合得到了融合特征空间,目标特征数据融合的遗传算法过程如下:
1)算法初始化:采用二进制编码方式将目标原始特征空间表示为一个长度为n(n为目标特征个数)的二进制串。随机产生M个个体作为初始群体P(0),设置进化代数计数器t=0、最大代数T以及交叉和变异概率;
2)适应度计算:对于第t代进化,以类间距离作为适应度函数,公式如下:
4)交叉运算:根据交叉概率将种群中的两个个体交换某些基因,以期望将有益基因组合在一起;
5)变异运算:对当前种群中的所有个体以事先设定的变异概率判断是否进行变异;
6)终止条件判断:若t>T或连续10代最佳个体不发生变化,则以进化过程中所得到的具有最大适应度个体作为融合特征编码输出,否则转到2)。
2 多神经网络融合
2.1 多分类器融合理论框架
多分类器融合模型的构建通常分为两个阶段:1)基分类器集合设计,在给定数据集上独立的构建一组基分类器,要求这组基分类器融合后能获得尽量好的分类性能;2)融合规则设计,为精心设计的基分类器集合设计融合规则,使得多分类器融合后的分类效果最好。文献[7]系统研究了多分类器的融合,并给出了多分类器融合的理论框架,如图1所示。
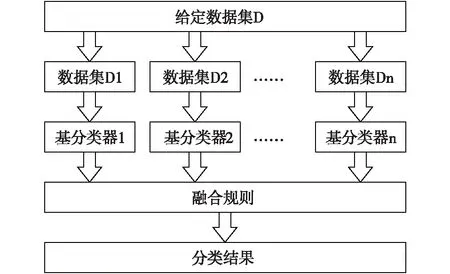
图1 多分类器融合的理论框架
本文基于多分类器融合模型的理论框架,并依据特征级融合得到的目标融合特征数据集,建立基于目标融合特征的多神经网络融合模型。
2.2 多神经网络集合的构建方法
文献[8]证明了基分类器的性能越好、相互之间的差异越大,融合后的分类效果越理想。对于已经得到的目标融合特征数据集,通常有装袋(Bagging)和提升(Boosting)两种方式来生成基分类器集合[9-10]:
1)装袋:对于含有N个样本的训练数据集D,按照均匀概率分布从训练数据集D中有放回地抽样N次,并重复该过程k次,得到k个含有N个样本的自助训练集,用于生成k个基分类器。由于装袋按照均匀分布有放回抽样,因此,在同一自助训练集中,某些样本可能出现多次也有可能不出现,但每个样本被抽取的概率都为1-(1-1/N)N,当N趋于无穷时,该概率收敛于1-1/e。
2)提升:对于含有N个样本的训练数据集D,迭代的学习k个分类器。开始时,为每一个样本分配一个初始权重,在第i次迭代学习时,从D中有放回抽样每一个样本被抽中的机会由其权重决定,得到新的训练集并导出基分类器Ci,用Ci对D中N个样本分类,提升被误分类样本的权重,以迫使以后的迭代更关注先前被误分类的样本。
提升和装袋导出的融合分类器识别准确率要高于从原始训练数据集导出的单个分类器,虽然提升常常能够得到比装袋更高的准确率,但由于提升关注误分类样本,因而存在过拟合的风险。装袋能够有效降低由于训练数据不同导致的误差,因而装袋方式导出的融合分类器有更好的稳定性。另外,由于装袋不关注训练集中的任何特定实例,因而也不容易受到噪声数据和过分拟合的影响。
本文选择BP神经网络作为基分类器,由于希望通过多个BP神经网络融合来降低识别误差的方差,从而提升目标识别的稳定性,所以采用装袋方法来导出BP神经网络集合,对于包含n个元组的目标融合特征数据集D,按如下方式构建k个BP神经网络:第i(i=1,2,…,k)次装袋,按照均匀概率分布从融合特征数据集D中有放回抽出样本容量同样为n的数据集Di,每一个数据集Di都用于训练导出一个BP神经网络。
2.3 多神经网络的蒙特卡洛随机融合方法
多分类器的融合算法可以分为固定的融合算法和可训练的融合算法。可训练的融合算法把k个BP神经网络的识别结果作为中间特征再学习得到决策分类器,虽然在训练样本充足的情况下,能够获得更好的识别准确率,但容易受到过拟合的影响。固定的融合算法给每个BP神经网络赋予投票权值融合它们的结果做出最终决策,在投票权值分配合理的情况下,能够获得较好的识别准确率,也不容易受到过拟合的影响。
为了合理分配每一个神经网络的投票权值,本文提出一种蒙特卡洛随机融合法对多神经网络的识别结果进行融合。只要实验次数足够多,就能逼近最优的权值组合,既能有效地避免优化过程陷入局部最优的情况,又能快速获得近似最优权值组合,且该方法易于实现。
对于包含N个目标的样本,设BPi(j)是第i个BP神经网络对第j个目标的识别结果,multiBP-fore(j)是融合神经网络对第j个目标的识别结果,label(j)是第j个目标的标签,wi是第i个BP神经网络的投票权值,且∑wi=1,则有

对于第j个目标,识别误差ej设定如下,融合输出错误记为1,正确记为0,即
于是问题转化为一个有约束的优化问题,如下:
蒙特卡洛随机法优化该问题时,首先按照约束条件随机生成M组(M≥100000)投票权值;其次计算每一组w对应的识别误差E(w);最后从M组w中选出使得融合分类器识别误差最小的一组w作为多神经网络的投票权值。
3 仿真实验与分析
为了验证本文提出的基于目标融合特征和多神经网络融合的识别方法具有良好的性能,本文设计了目标特征的提取与融合实验、基于不同特征的BP神经网络识别实验和基于融合特征的多BP神经网络融合识别实验。
3.1 目标多特征的提取与融合
本文首先选择三类飞机目标(B1战略轰炸机、Ah-64直升机和F16战斗机)的可见光图像各100张,图2给出了经过灰度处理后的三类示例目标的灰度图像,从左到右依次是B1战略轰炸机、Ah-64直升机和F16战斗机。首先提取出目标图像的仿射不变矩特征和Hu不变矩特征,三类示例目标的仿射不变矩特征和Hu不变矩特征分别如表1和表2所示,其次按照表3设定的区间范围,以高斯分布为每类目标各随机生成100条运动特征数据和电磁辐射特征数据,其中高斯分布的均值为相应区间的中间值,均方差为区间长度的0.2。

图2 三类示例目标的灰度图像

表1 三类示例目标的仿射不变矩特征

表2 三类示例目标的Hu不变矩特征

表3 三类示例目标的运动特征和机载雷达特征参数区间
对表1、表2、表3中原始数据进行归一化处理后按照遗传算法完成目标多特征数据融合,遗传算法的运行参数设置如下:群体大小M=30,终止进化迭代次数T=500,交叉变异概率分别为0.7和0.05,总的遗传代数和连续10代最佳个体不发生变化为终止条件。目标特征数据融合实验得到的融合特征编码为101101111001111100。所以融合后的特征空间为φ1φ3φ4φ6φ7φ8φ9φ12φ13φ14φ15φ16。
3.2 基于不同特征的BP网络识别
为了比较单BP神经网络基于不同特征识别时的准确率,从表1、表2、表3代表的数据集中,分别随机选择相同数量的样本作为训练数据集,用于训练单一的BP神经网络,剩余样本作为检验数据集,用于测试BP神经网络的识别准确率。
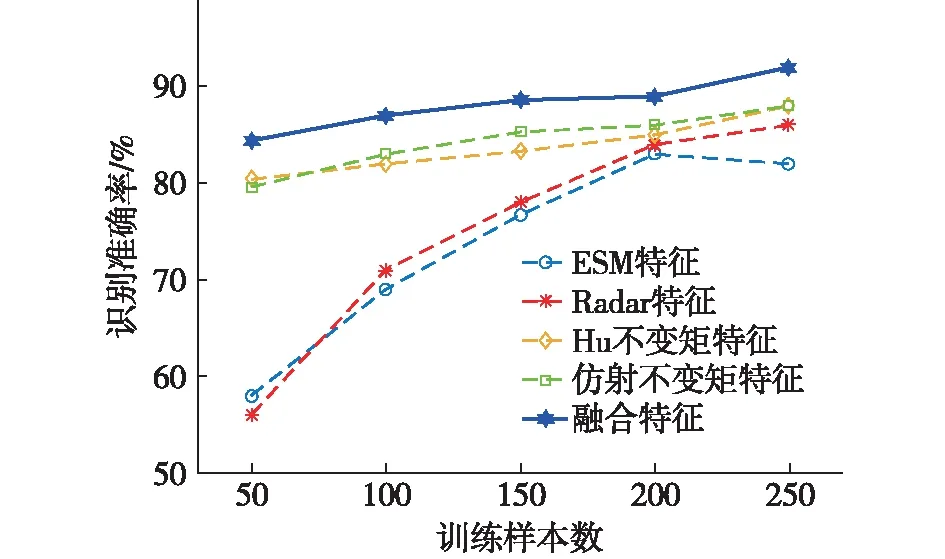
图3 基于目标不同特征的BP网络识别
图3给出了训练样本数量分别为50、100、150、200、250时,BP神经网络基于某种单一特征识别的准确率和基于融合特征识别的准确率。分析图3可以发现:分类器的识别准确率与分类器训练样本数量大致上呈正相关,但训练样本数过多时,检验结果因检验样本数不足而波动较大,因此本文设定训练样本数为200。另外,基于融合特征识别的准确率曲线高于其他所有曲线,说明了在使用的分类器相同时,基于融合特征的识别效果明显优于基于单一特征。
3.3 基于融合特征的多BP网络融合识别
为了比较单一分类器与融合分类器的识别稳定性,首先从目标融合特征数据集中随机选择200条数据作为训练数据集D-Train,对D-Train进行装袋处理,得到的5组训练集分别用于训练5个BP神经网络。然后以D-Train作为5个已经训练完成的BP网络输入,按照蒙特卡洛随机模拟法计算出各个基分类器的权值,最后使用剩余的100条数据作为检验数据集对整个融合分类器进行检验。该实验重复10次,得到了每次实验中每个BP神经网络识别的准确率和多BP网络融合识别的准确率,如图4所示。
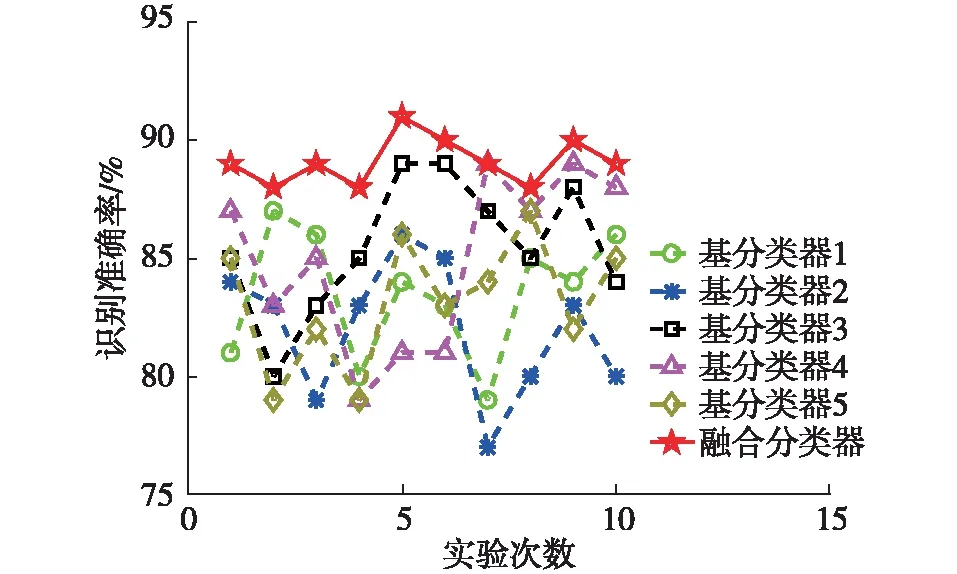
图4 基于融合特征的多分类器融合识别
从图4可以看出:在同一次实验下,虽然融合分类器相比于最好的BP神经网络,识别准确率提升不大,但识别准确率仍然高于最好的BP神经网络,另外,融合分类器的识别准确率的波动明显小于任意BP神经网络,即多BP网络融合识别的准确率相比于单一的BP神经网络呈现稳中有升的态势。
4 结束语
本文提出了一种基于多特征和多神经网络融合的目标识别方法。首先用遗传算法得到目标的融合特征,并提出蒙特卡洛随机法融合多神经网络的识别结果,最后仿真实验验证了该方法在稳定识别的情况下有较高的识别准确率。如果进一步优化特征融合的遗传算法并仔细考虑基分类器的选择,识别的准确率还能够继续提升。
[1] 郭小宾,王壮,胡卫东等.基于贝叶斯网络的目标融合识别方法研究[J].系统仿真学报,2005,17(11):2713-2716.
[2] 朱旭峰,马彩文. 基于多不变量和多分类器融合的飞机识别[J]. 仪器仪表学报, 2011,32(7):1621-1627.
[3] 张桂林,王红杰,朱霞等. 基于多分类器ESM与雷达情报融合识别[J]. 指挥信息系统与技术, 2013,4(6):54-58.
[4] 王东明. 基于特征级融合的目标识别方法研究[D]. 沈阳理工大学, 2013.
[5] 李小花,李姝. 基于数据挖掘的战场目标综合识别技术[J]. 指挥控制与仿真, 2016(3):16-23.
[6] 刘新科,于吉红等. 基于仿射不变矩特征的舰船图像识别方法[J]. 海军航空工程学院学报, 2011,26(6):687-690.
[7] Kittler J,Hatef M,Duin R P W,et al. On Combining Classifiers[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1998,20:832-844.
[8] Kittler J,Hatef M,Duin R P W,et al. On Combining Classifiers[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1998,20:832-844.
[9] 范明,范宏建等译. 数据挖掘导论(完整版)[M]. 北京:人民邮电出版社, 2011.
[10] Li Xiang, Li Tao. Classification Algorithm of Kernel-based In Adaboost[J]. Computer Knowledge &Technology, 011,7(28):6970-6979.
Target Recognition Technology Based on Multi-feature Fusionand Multiple Neural Networks Fusion
JIANG Pan, SHAN Lian-ping, LIU Yi-hai
(Jiangsu Automation Research Institute, Lianyungang 222061, China)
Aiming at the problem that the result of comprehensive target recognition, given by the decision-level fusion, is not accurate enough when some single-source results are highly conflicting or unavailable, a new method based on target fusion feature and multiple neural networks fusion is studied. In this method, multiple features of a target are fused by genetic algorithm firstly. And then the Monte Carlo fusion method is used to fuse the multiple neural networks, build by bagging method separately. The experiment verifies that this method can respectively promote the accuracy and stability of target recognition by two-level fusion.
target recognition; genetic algorithm; fusion feature; multiple neural networks; Monte Carlo fusion method
1673-3819(2017)06-0104-05
E917
A
10.3969/j.issn.1673-3819.2017.06.022
2017-09-25
2017-10-16
国防预研基金项目
蒋 攀(1992-),男,江苏宜兴人,硕士研究生,研究方向为多源信息融合与目标识别。 单连平(1964-),男,研究员,硕士生导师。 刘义海(1988-),男,博士,高级工程师。
猜你喜欢
电子产品世界(2022年4期)2022-04-21
包装与食品机械(2022年1期)2022-03-23
科学导报(2021年61期)2021-09-26
汽车工程(2021年12期)2021-03-08
计算机系统应用(2021年2期)2021-02-23
中国食用菌(2020年9期)2020-11-11
电子技术与软件工程(2019年18期)2019-11-18
电子制作(2019年16期)2019-09-27
电子制作(2019年24期)2019-02-23
电子技术与软件工程(2017年14期)2017-09-08