
仿生鳍条姿态测量及其误差分析
2018-01-05 00:58欧世星王光明谭晓朋郭晓俊
计算机测量与控制 2017年12期
欧世星,王光明,谭晓朋,郭晓俊
(国防科学技术大学 机电工程与自动化学院,长沙 410000)
仿生鳍条姿态测量及其误差分析
欧世星,王光明,谭晓朋,郭晓俊
(国防科学技术大学 机电工程与自动化学院,长沙 410000)
仿生鳍条是仿生机器鱼的核心运动机构,为提高其运动控制精度,针对其轻巧、微小的结构特点,设计了以质量轻、体积小、精度高的MEMS陀螺仪ADXRS290和ADXRS453为核心的仿生鳍条姿态测量系统,可实现仿生鳍条偏航角、俯仰角和滚转角的实时测量;针对仿生鳍条姿态测量中随机误差较大的特点,给出了一种以Allan方差为主的姿态测量误差算法,然后通过实验采集测量数据,定量分析了各运动姿态误差项;实验结果表明,角速率随机游走和零偏不稳定性是姿态测量的主要误差项,在后续误差处理中做针对性处理能提高姿态测量精度,对提高仿生鳍条运动效率有很大的意义。
仿生鳍条;姿态测量;Allan方差;误差分析
0 引言
鱼类经过数百万年的进化,拥有独特的形体结构、感知和调节系统,具有卓越的水下运动能力[1]。模仿MPF波动推进鱼类设计的仿生鳍条二维运动机构,能很好的模仿鱼类鳍条的运动方式。准确控制其运动姿态使其贴近仿生原则是提高运动效率的关键,而姿态测量是准确控制运动姿态的前提。本文以质量轻、体积小、成本低的MEMS陀螺仪为核心设计的仿生鳍条姿态测量系统,能很好的感知仿生鳍条当前的运动姿态,为准确控制其运动状态提供重要保障。
姿态测量系统所得的姿态信息含有较大的误差,来源于MEMS陀螺仪的随机误差、测量电路引起的误差、数据处理过程引入的误差和安装误差等多个方面,严重制约了测量姿态的精度,分析其姿态测量误差是提高姿态测量精度的重要途径,对提高仿生机器鱼运动效率和灵活性有着重要的意义。
1 仿生鳍条的姿态测量
仿生鳍条的姿态测量针对仿生鳍条二维运动机构而设计,仿生鳍条由3个电机控制:一个直流电机、两个步进电机,分别用于控制仿生鳍条的摆速、摆幅和扭转运动,能够实现灵活的二维运动,很好的模仿鱼类鳍条的运动方式,如图1所示。

图1 仿生鳍条二维运动机构

图2 姿态测量系统结构图
仿生鳍条的运动姿态是其相对于地理坐标系的运动姿态,包括3个方向上的运动姿态角:偏航角、俯仰角和滚转角,陀螺仪是测量运动姿态角最常用的传感器,而仿生鳍条是微小、轻巧的结构,采用传统陀螺仪进行测量时,因其质量、体积过大,不仅不能得到其准确的运动姿态,甚至还会破坏其原有的运动状态。而以新型的MEMS陀螺仪质量轻、体积小、成本低为核心的姿态测量系统,能够实现仿生鳍条运动姿态的测量,其系统结构如下图所示:姿态测量模块由两个MEMS陀螺仪组成,其中ADXRS453是高精度单轴角速率陀螺仪,用于偏航角姿态的测量,采用10.5 mm×10.4 mm×4 mm空腔层压封装,质量仅为几克,最高可提供±300°/s的角速率测量,灵敏度为80 LSB(°/s)。ADXRS290是高性能双轴角速率陀螺仪,用于滚转角和俯仰角姿态的测量,采用4.5 mm×5.8 mm×1.2 mm空腔层压封装,质量不超过0.5克,最高可测量±100°/s的角速率变化,灵敏度为200 LSB/°/s。两MEMS陀螺仪均采用谐振器陀螺工作原理,都包含多个多晶硅检测结构,而每个检测结构包含一个扰动框架,通过静电将其驱动到谐振状态后,即可在旋转时产生科氏力,而科氏力会带来其内部容性结构的改变,从而改变输出电压的大小,经过解调后即可得到最初角速率的电压信号。
信号处理模块采用的是ADI公司配套的开发电路,主要完成AD转换、带通滤波和温度补偿3个功能。首先由AD转换模块将初始输出角速率电压信号转化为数字信号,然后通过带通滤波处理,能够抑制测量角速率频带范围之外的噪声影响。又MEMS陀螺仪的偏置零点和输出数据与温度都有很大的关系,对其进行温度补偿能够明显减小温度对测量角速率的影响。
信号采集板的主要功能是将测试信号采集并传输到上位机中。经过信号处理模块的角速率信息以16位二进制补码的形式存在内部寄存器里,信号采集板首先通过SPI接口将角速率信息读出,然后通过USB接口将其传入上位机中。
上位机使用的是个人笔记本电脑,在上位机中通过LABVIEW控件即可读取并储存测量角速率信息,将采集信号以TXT格式储存起来,用MATLAB读取即可得到测量角速率信息,并可对其进行后续的处理。
2 仿生鳍条运动姿态误差分析算法
测量所得的仿生鳍条运动姿态含有较大的误差,来源于安装误差、测量电路误差和MEMS陀螺仪引起的随机误差等多个方面,其中以MEMS陀螺仪的量化噪声、角速率随机游走和零偏不稳定性为主。结合Allan方差方法对这三项误差进行分析需要进行以下步骤[2-4]:
1)采集数据并进行分组。
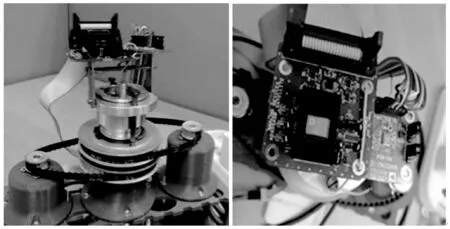
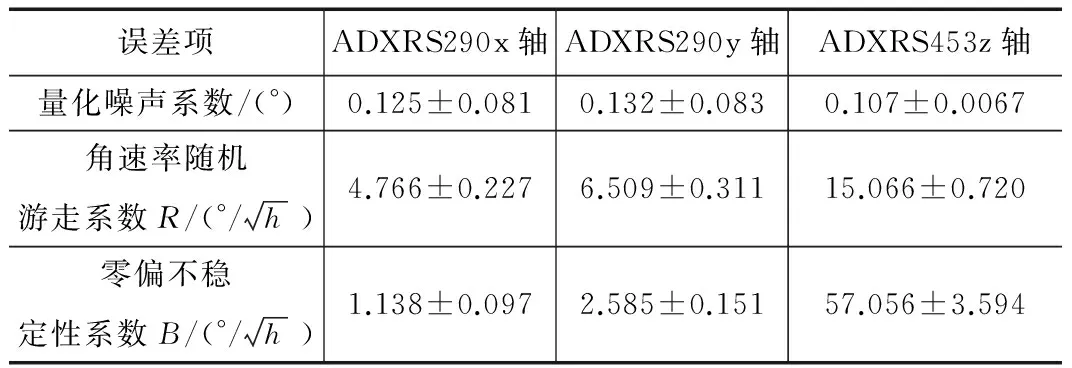
首先以采样周期为t0采集一定量的数据,设数据总量为N,把每n个连续的采样数据规定为一组,则每组连续采样数据占用的时间为T(T=n·t0),定义T为分组时间,显然选取不同的分组时间T时,每组连续采样数据包含的数据点个数n是不同的。为保证计算的正常进行,需规定每组数据量的最大值为N/2,即需要n 2)计算每组数据的平均值。 (1) 3)计算Allan方差。 对每相邻两组数据的平均值之差在整个数据范围内求平均,即可得到每组包含n个数据时(对应每组数据采样总时间为T时)的Allan方差[4]: (2) 4)绘制Allan方差对数图。 把每组数据包含的数据个数n从1开始连续取值,直到每组数据包含数据个数为N/2,此时每个取值将对应不同的分组时间T(T=nt0),分别计算每一个T值对应的Allan方差σ2(T)。以T为横坐标,σ(T)为纵坐标作双对数曲线图即可得到Allan方差对数图。 5)确定量化噪声系数Q. 量化噪声是MEMS陀螺仪输出的量化性质造成的,MEMS陀螺仪的量化噪声系数Q与其功率谱密度的关系为: (3) 又随机误差的Allan方差与功率谱密度有着定量的关系[5]: (4) 6)确定角速率随机游走系数R. 角度随机游走又称角速率白噪声,来源于外界振动干扰和激励频率不稳等多种原因,角速率随机游走系数R与其功率谱密度的关系为: Sw(f)=R2 (5) 代入式(4)可得到角速率随机游走系数R与Allan方差的对应关系。将双对数曲线斜率较小部分拟合成斜率为-1/2的直线,找到与分组时间T=1相交的点即可得到角速率随机游走系数R。 7)确定零偏不稳定性系数B. 零偏不稳定性主要来源于电子器件本身带有的零偏抖动,存在于较低频率范围,零偏不稳定性系数B与其功率谱密度的关系为: (6) 代入式(4)中,可以得到零偏不稳定性系数B与Allan方差的对应关系。将Allan方差对数图中分组时间较大的平滑部分拟合为斜率为0的直线,找到与y轴的交点即可得到零偏不稳定性系数B。 8)确定各项误差系数的取值范围。 由于计算Allan方差时每组使用的数据量有限,所得的误差项系数会存在一定的误差,定义为其百分比误差δ,大小可通过以下公式计算[5]: (7) 为对MEMS陀螺仪测量姿态进行分析,首先需进行信号采集:为排除仿生鳍条运动时的机械振动等干扰,将实验所用的MEMS陀螺仪ADXRS453和ADXRS290固定仿生鳍条上,使仿生鳍条处于水平位置并关闭其控制电机,保持稳定并预热一段时间后采集数据。实验所用仿生鳍条姿态测量系统如图3所示。左图为姿态测量系统正视图,右图为姿态测量系统俯视图,右图中左侧较大的为MEMS陀螺仪ADXRS453测量模块,右侧较小的为MEMS陀螺仪ADXRS290测量模块。 图3 仿生鳍条姿态测量系统 通过上位机中的LABVIEW控件采集测量数据,对两个MEMS陀螺仪均采集100 000个以上的数据点后,将其存储于TXT格式的文本中,然后通过MATLAB读取即可得到原始的姿态测量角速率信息。再根据仿生鳍条运动姿态误差分析算法中的1~4步,首先对数据进行分组,然后计算每组数据的平均值,然后对整个数据范围求取Allan方差,再通过MATLAB即可绘制出3个测量姿态角的Allan方差对数图(见图4)。 图4 Allan方差对数图 图5 ADXRS453 Allan方差分析图 根据以上步骤得到测量姿态角各项误差大小后,再根据仿生鳍条运动姿态误差分析算法中的第8步可确定各误差项系数的取值范围,最后得到各误差项大小及带误差的取值范围,如表1所示。三项误差中量化噪声相对最小,而角速率随机游走和零偏不稳定性是此姿态测量系统的主要误差,其中ADXRS453 z轴的零偏不稳定性是三项误差中最大的一项,对于ADXRS290x轴和ADXRS290y轴而言,其角速率随机游走是主要误差项。 表1 测量姿态角各项误差大小 本文针对仿生鳍条微小、轻巧的特性,设计的姿态测量系统简单易实现,能够实时测量仿生鳍条的3个方向上的运动姿态角,且其体积小、成本低、可移植性强,对此类轻巧、微小型结构的姿态测量有很大的参考意义。 通过实验并结合Allan方差方法对测量姿态的三项主要误差进行定量分析,实验结果表明,角速率随机游走和零偏不稳定性是姿态测量的主要误差。在以后的误差处理中进行针对性处理能够大幅提高姿态测量精度,对提高仿生鳍条运动效率有很大的意义。同时也表明,Allan方差方法是分析此类误差的一种有效方法。 [1]王光明, 胡天江, 沈林成. 仿鱼柔性长鳍波动运动分析与建模[J]. 动力学与控制学报, 2006, 4(4):348-352. [2]赵思浩, 陆明泉, 冯振明. 基于一种简化Allan方差法的IMU误差分析[J]. 传感器与微系统, 2010, 29(12):12-14. [3]于 婷, 孙 伟, 文 剑. MEMS惯性组件的误差特性分析与标定[J]. 传感技术学报, 2016, 29(6):859-864. [4]曹慧芳, 吕洪波, 孙启国. 基于MEMS陀螺仪的随机误差分析[J]. 计算机测量与控制, 2016, 24(1):178-181. [5]Hou H, El-Sheimy N. Inertial sensors errors modeling using Allan variance[J]. 2003. Attitude Measurement and Error Analysis of Bionic Fin Ou Shixing, Wang Guangming, Tan Xiaopeng, Guo Xiaojun (Department of Electrical and Mechanical Engineering and Automation,National University of Defense Science and Technology,Changsha 410000,China) The bionic fin is the core movement mechanism of the bionic machine fish. In order to improve its motion control precision, a bionic fin attitude measurement system with high quality, small volume and high precision MEMS gyroscope ADXRS290 and ADXRS453 was designed for its light weight, tiny structural features, which could real-time realize measurement of yaw angle, pitch angle and roll angle of bionic fins. According to the characteristics of random error in the measurement of bionic fins, a posture error algorithm based on Allan variance has been given. Then, the error of the motion attitude was analyzed quantitatively by experimentally collecting the measured data. The experimental results showed that the angular rate random walk and the zero partial instability were the main error items of the attitude measurement. The follow-up error treatment can improve the accuracy of the attitude measurement and improve the efficiency of the movement of the bionic fin. bionic fin; attitude measurement; Allan variance; error analysis 2017-04-10; 2017-06-29。 国家自然科学基金项目(61273347)。 欧世星(1992-)),男,湖南益阳人,硕士研究生,主要从事测试计量与仪器方向的研究。 王光明(1974-),男,博士研究生,副教授,主要从事仿生机器鱼方向的研究。 1671-4598(2017)12-0043-03 10.16526/j.cnki.11-4762/tp.2017.12.011 TP242 A

3 实验结果及分析


4 结论
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
现代养生·下半月(2017年9期)2018-01-04
百科探秘·航空航天(2017年9期)2017-12-31
初中生世界·九年级(2017年10期)2017-11-08
百科探秘·航空航天(2017年9期)2017-11-07
中国高新技术企业(2017年8期)2017-06-05
山东工业技术(2016年15期)2016-12-01
中学生数理化·八年级数学人教版(2016年5期)2016-08-23
中学生数理化·八年级数学人教版(2016年5期)2016-08-23
