基于耦合度的铁道车辆平稳性分析
2018-02-08 05:21陈迪来宗聪聪
同济大学学报(自然科学版) 2018年1期
陈迪来, 沈 钢, 宗聪聪
(同济大学 铁道与城市轨道交通研究院, 上海 201804)
运行在轨道上的铁道车辆除了受线路不平顺激励而产生强迫振动以外,还由于车辆-轨道系统内部自身激励而产生自激振动(以轮对为特征的振动叫轮对蛇行运动).轮对蛇行运动在某些特殊工况下,还会导致车体或者构架的剧烈振动[1].轮轨激扰通过轮对传到转向架构架,再由转向架构架传到车体,造成车体剧烈振动,严重影响旅客乘坐舒适度.当转向蛇行运动频率与车体某些固有频率相接近时,极易引起车体的振动加剧.这种近似共振的频率激扰,容易使车体和转向架的振动发生耦合,使车体振动的幅值扩大.如果这种振动长期得不到抑制,就会造成晃车现象[2].
车体晃动时,由于横向晃动频率比较接近人体的敏感区域,从而严重恶化了旅客乘坐的舒适性.周劲松[3]、张洪等[4-5]基于模态参数识别方法,对某客车横向异常现象进行了分析.Dumitriu[6]分析了横向悬挂参数对铁道车辆乘坐舒适性的影响.Suarez等[7]研究了车辆不同的悬挂参数对车辆动力学性能影响的灵敏性.池茂儒等[8]研究了转向架蛇行运动对铁道车辆运行平稳性的影响.黄彩虹等[9]使用数值方法和现场试验研究了某高速列车车体低频蛇行运动问题.Iwnicki[10]对车体蛇行和转向架蛇行之间的区别进行分析,根据线性模型和非线性模型对车体的蛇行稳定性进行了分析.朴明伟等[11]建立了刚柔耦合模型,分析了抗蛇行高频阻抗对柔性车体底板横向振动的影响规律.何旭升等[12]对运营中的高速动车组进行振动在线测试,发现车体出现晃动时平稳性指标明显大于2.5,晃动主频为1.5 Hz左右,主要表现为车体侧滚和摇头的耦合振型.
对于转向架蛇行运动与车辆横向平稳性之间的耦合振动的研究相对较少,本文首先利用Simpack建立了某型地铁车的非线性模型,仿真再现了车体横向平稳性局部恶化现象;再根据模糊数学的欧式贴近度识别不同速度工况下车辆系统的模态参数,分析车辆横向平稳性局部恶化的原因.在此基础上,提出了铁道车辆系统所有模态间的耦合度这个概念,利用耦合度判断转向架蛇行运动与车体横向振动的耦合程度,并据此来优选悬挂参数,提高车辆的运行平稳性.
1 地铁车车体横向晃动现象的模拟
1.1 车辆系统动力学模型
某型地铁在实际运动中,在某些速度范围内,车体出现横向晃动现象.根据某型地铁车的参数,如表1所示,利用Simpack软件建立了动力学仿真模型.模型简化成车体、构架、轮对等构成的多刚体系统,各部件之间通过弹簧、阻尼等元件组成[13].

表1 车辆的部分参数
1.2 非线性临界速度计算
车辆的非线性临界速度是车辆在线路上运行允许的最高速度,当车辆运行的速度超过临界速度时,会产生一种不稳定的蛇形运动,他们的振幅随着时间的延续而不断地扩大,使轮对左右摇摆直到轮缘撞击钢轨,甚至引起脱轨.
仿真条件:给车辆的第一位轮对8 mm的横移量为初始条件,然后计算在光滑直线上第一位轮对横移量的收敛情况,如图1所示.
从图1中可以看出,此车辆模型在速度为215 km·h-1时,一位轮对的横移量能完全收敛,但是在速度为216 km·h-1时,一位轮对的横移量不能收敛,轮对横移的振动变为不稳定的状态.即车辆的非线性临界速度为215 km·h-1,高于设计的最高速度100 km·h-1.

图1 一位轮对横向位移
1.3 横向晃动现象的模拟
借助1.1节车辆动力学仿真模型,对车辆的平稳性进行了仿真分析,仿真工况为:车辆运行的速度为5~120 km·h-1(每个5 km·h-1为一个速度等级),轨道不平顺采用美国5级线路不平顺.
图2a是车辆垂向平稳性随车辆运行速度的变化规律,从图中可知,车辆垂向平稳性指标随着运行速度的增加而单调增加,并且在速度为120 km·h-1以下时,垂向平稳性的指标均小于2.75,评定等级[1]为良.
图2b是车辆横向平稳性随车辆运行速度的变化关系,从图中可知,车辆横向平稳性与速度的变化关系并不是呈线性关系.对于车体中部而言,在速度为50 km·h-1时,横向平稳性出现了一个局部峰值;对于车体后端而言,在速度为45 km·h-1时,横向平稳性出现了一个局部峰值.此时车辆的横向平稳性有所恶化,说明车辆横向出现了异常晃动现象,这与该地铁车辆在实际运行中出现的现象相同.
2 耦合度
2.1 模糊贴近度
模糊贴近度是描述两个模糊集合之间的接近程度,即两个模糊集合的相似程度.在模糊模式识别中,常采用贴近度识别模糊子集的模式类别.贴近度越接近1,说明这两个模糊子集越相似,贴近度越接近0,说明两个模糊子集的差异越大[14-15].
(1)
式中:Nxy为欧式贴近度,n为向量的维数;子集x=

a 垂向平稳性

b 横向平稳性
[x1,x2,…,xn];子集y=[y1,y2,…,yn];xi≥0;yi≥0;i=1,2,…,n.首先要对数据进行前处理(归一化处理),即:


(2)
式中:i=1,2,…,n;a=maxx;b=maxy;Nxy∈[0,1].
2.2 模态追踪
假设某铁道车辆系统有n个自由度,车辆运行的速度为v,忽略轨道不平顺,建立车辆模型的线性化方程[1],如下所示:
(3)
式中:Μ,C,K分别为车辆系统质量,阻尼和刚度矩阵;Cwr,Kwr为与轮轨接触参数有关的矩阵;q为广义位移向量.


(4)
求解特征矩阵A的特征值λ和特征向量X,去掉特征值虚部为零的数据,记为
(5)
对特征向量的幅值Yi和相位角ψi进行归一化,这样就可以得到参数V1条件下归一化的各个振型的特征向量,如表2所示.

表2 参数V1条件下的特征向量
根据2.2节原理,同样可以得到参数V2条件下归一化的各个振型的特征向量.
根据模糊贴近度,计算不同参数条件下的特征向量的相似程度[16].
(6)
(7)
Nij=ωNYij+(1-ω)Nψij
(8)
式中:NYij为不同参数条件下模态振幅的贴近度;Nψij为不同参数条件下模态相位角的贴近度;α,β分别为振幅和相位角的权重;Nij为模态综合贴近度;ω为振幅在综合贴近度中所占的比例.第j列中的N·j的第k个数值最大,就说明:参数V1的第k个振型与参数V2的第j个振型最相似.按照上述原理,依次计算不同参数条件下的特征向量,然后利用欧式贴近度,进行识别哪两个模态最接近,把最接近的模态放在一起,这样就实现了模态的追踪.
2.3 耦合度
耦合度是模块间的关联程度的度量,是用来描述多个系统或者运行形式相互彼此作用影响的程度[17].因此,在模糊贴近度的基础上,提出了铁道车辆系统所有模态之间的耦合度:
(9)
式中:D为耦合度,Nij为第i个模态和第j个模态之间的贴近度,ωij为权重系数(在设计权重系数的时候,应考虑车辆系统中,垂向和横向为弱耦合[18]).
3 车体横向晃动分析
3.1 模态计算
从图2中可以看出,车辆在40~60 km·h-1速度区间内,车辆的横向平稳性有所恶化.为进一步分析车辆横向平稳性恶化的原因,建立了23自由度的车辆线性化模型,根据贴近度原则,计算车辆所有刚体模态的频率和阻尼比与速度的关系.
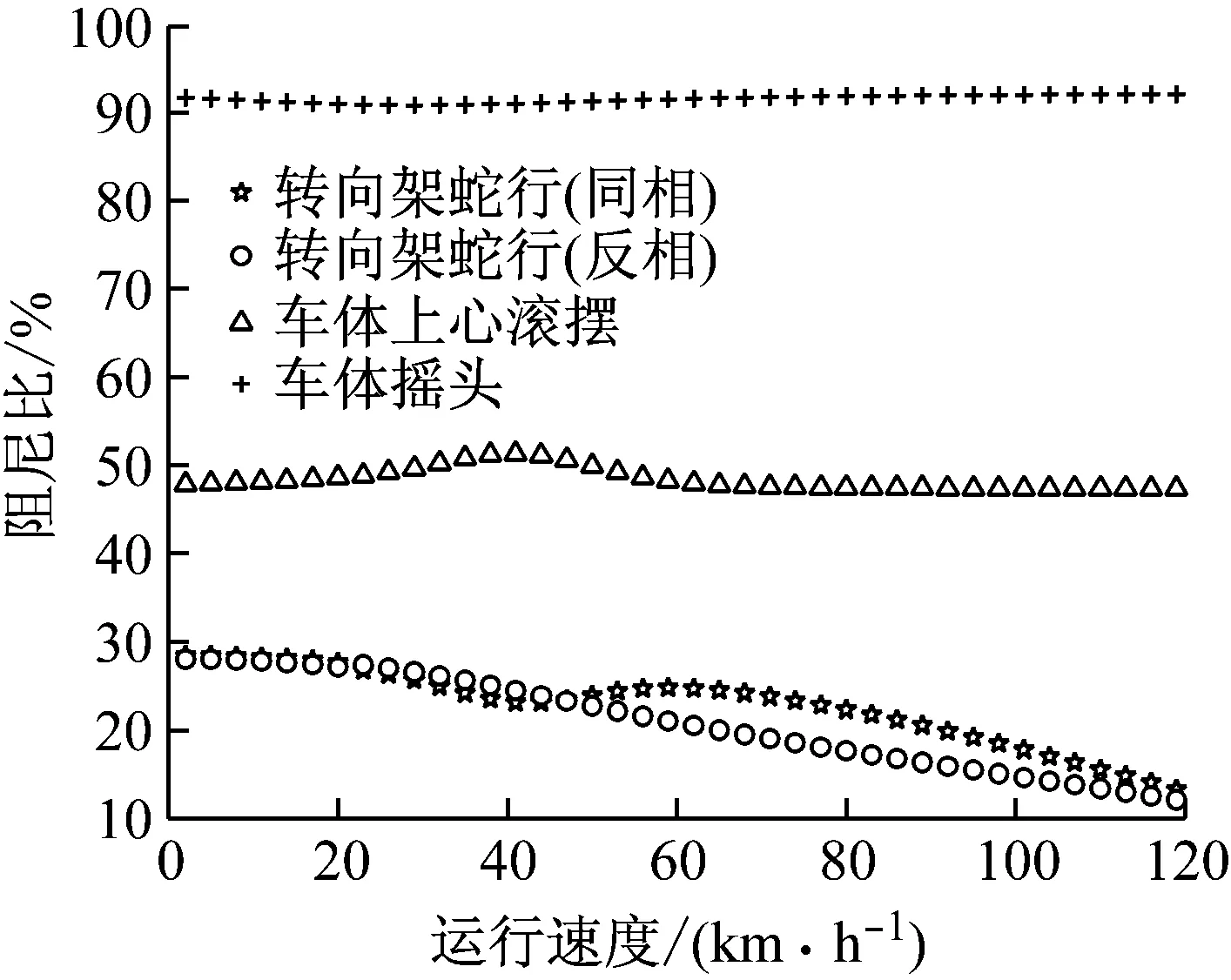
从图3中可以看出,转向架蛇行频率随着速度的增加而增大,这与理论分析结果相同,说明利用模糊数学的欧式贴近度原则,能有效追踪刚体模态.车体固有模态的频率与速度无关.速度区间为40~60 km·h-1时,转向架蛇行运动的频率与车体上心滚摆和摇头的频率相接近,并且车体上心滚摆的阻尼比急剧下降,最低下降到了10%,车体摇头的阻尼比也急剧下降,最低下降到了14%,阻尼比越小,消能越慢.结合横向平稳性计算结果,说明此时由于转向架蛇行运动频率和车体横向固有频率相接近而发生共振,恶化了局部横向平稳性指标.

a 频率

b 阻尼比
为了分析在频率接近区域内各个刚体模态的振型形式,将车辆系统的23个自由度均匀分布在罗盘图上.图4为速度为50 km·h-1时,车体上心滚摆的矢量图,图4a为上心滚摆振型的各个自由度幅值相对大小,图4b为各个自由度的相对相位.图5为速度为50 km·h-1时,转向架蛇行运动(同相)的矢量图.对比图4和图5可以看出,在速度为50 km·h-1时,车体上心滚摆和转向架蛇行运动(同相)的振动图极为相似,此时他们的欧式贴近度为0.998,说明前后转向架蛇行运动(同相)引起的车体上心滚摆与车体固有的上心滚摆振动形式相同,说明此时发生了共振现象.同理研究发现,在运行速度50 km·h-1时,车体摇头和转向架蛇行运动(反相)欧式贴近为0.989,这也说明在该速度区域,前后转向架蛇行运动(反相)引起的车体摇头振动与车体固有的摇头振动发生共振.

a 振幅

b 相位角
3.2 耦合度分析
图6为该车辆模型各个模态之间的耦合度随速度变化情况,耦合度的数值越大,说明此时系统内各个模态相互影响的程度就越大,发生共振的可能也就越大.从图中可以看出,速度区间为40~60 km·h-1时,车辆系统的耦合度很大,这与横向平稳性恶化的速度区间相同,说明利用耦合度能反映横向平稳性局部恶化的情况.

a 振幅

b 相位角

图6 耦合度变化情况
4 参数优化
传统参数优化的方法是不断改变悬挂参数的数
值,观察车辆系统振动情况,然后优选悬挂参数.但是对于车体异常晃动问题,也很难确定一个观察目标.但是依据本文的耦合度为优化目标,可以方便快捷地优选悬挂参数,为解决车体异常问题提供了可行的研究方法.
取消牵引杆的横向刚度,将抗侧滚扭杆刚度减小到0.5 MN·rad-1,将二系垂向减振器的阻尼增大至70 kN·s·m-1,二系横向减振器的阻尼增大到50 kN·s·m-1,其余参数不变.
图7为优化后车辆的平稳性随速度的变化情况.从图中可以看出,优化后,车辆的垂向平稳性基本不变,这也说明转向架蛇行运动对车辆垂向平稳性基本没有影响.但是优化之后的车辆横向平稳性没有出现局部峰值,横向平稳性指标随着速度的增加而单调增大.
图8为优化悬挂后,车辆系统几种主要模态随速度变化规律.从图中可以看出,在某速度下,虽然转向架蛇行运动的频率与车体的上心滚摆和车体摇头频率相接近,但是转向蛇行运动的频率快速穿过车体的固有模态的频率,没有发生相互影响的情况,并且各自的阻尼比均没有出现急剧下降的现象.

a 垂向平稳性

b 横向平稳性

a 频率
b 阻尼比
图9为优化后车辆系统的耦合度情况,从图中可以看出,优化前系统的最大耦合度为47,优化之后,系统的最大耦合度为38,下降了23.68%.
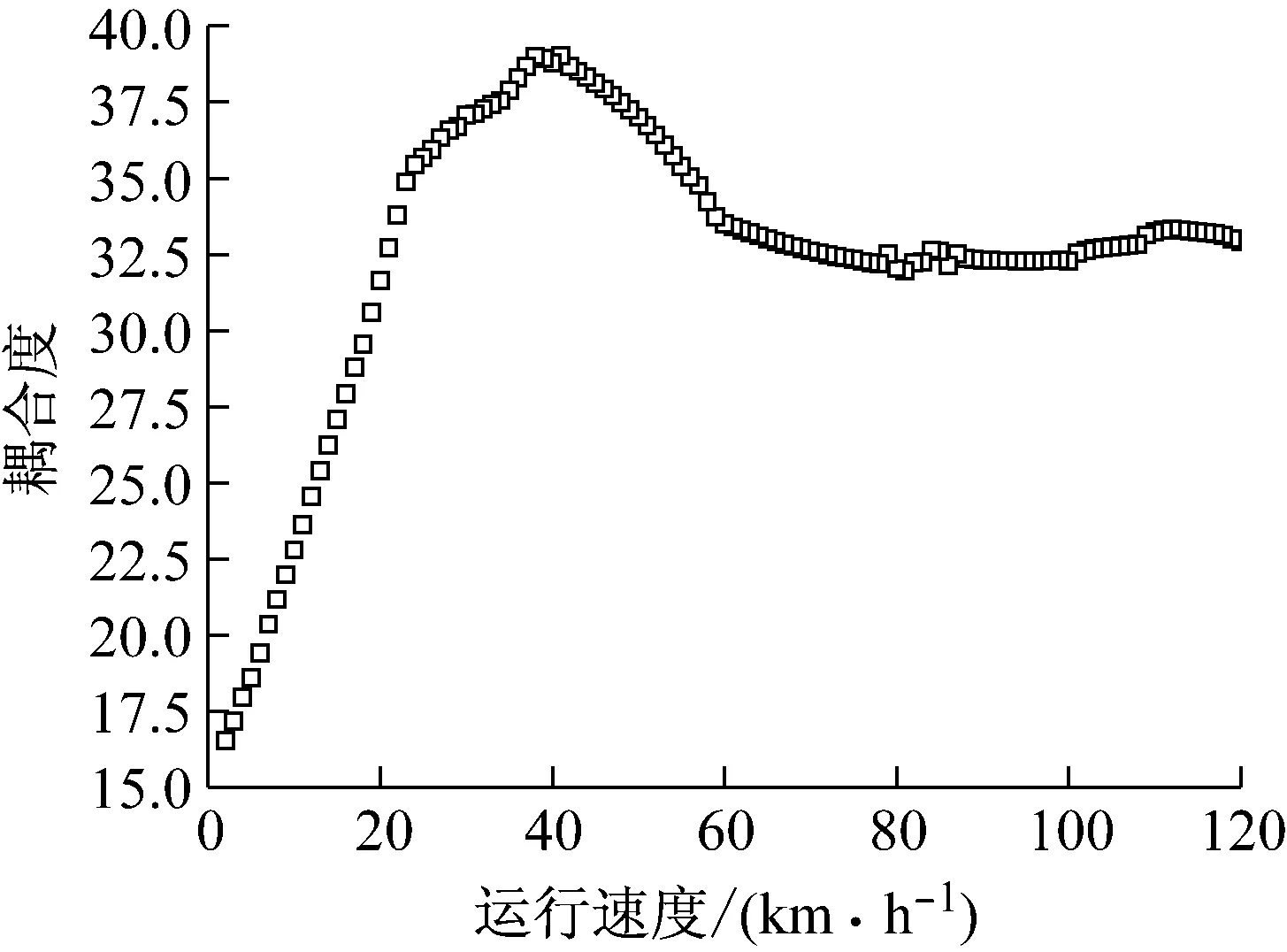
图9 耦合度变化情况(优化后)
5 结论
(1) 基于模糊数学的欧式贴近度,实现了对多自由度车辆系统的各刚体模态的自动识别和追踪,为分析各刚体模态频率和阻尼比随参数变化提供了有效的分析方法.结合车辆的平稳性指标等分析方法,能够更准确地掌握铁道车辆的动力学特性.
(2) 当转向架蛇行(同相)运动频率与车体上心滚摆频率相接近时,这两个模态的贴近度接近1,说明这两个模态的振型极为相似.由转向架蛇行(同相)运动引起的车体上心滚摆与车体的固有上心滚摆发生耦合振动,这样会恶化该速度段的横向平稳性.此时车体上心滚摆的阻尼比急剧下降,阻尼比下降到了10%.
(3) 转向架蛇行(反相)运动引起的车体摇头与车体固有的摇头发生耦合振动,也会恶化该速度段车辆的横向平稳性指标.如果转向架蛇行(同相)运动频率与车体固有上心滚摆频率相接近的速度区间,与转向架蛇行(反相)运动频率与车体固有摇头频率相接近的速度区间相同时,这样会更进一步恶化横向平稳性.
(4) 车辆横向平稳性出现局部恶化时,虽然平稳性指标没有超过优良评定等级,但此时车辆系统的整体耦合度大,耦合度越大,发生共振的可能性就越大.以降低耦合度为优化目标,能消除车体横向平稳性局部恶化问题,减弱车体横向耦合振动.
[1] 沈钢. 轨道车辆系统动力学[M].北京:中国铁道出版社,2015.
SHEN gang. Railway vehicle system dynamics[M].Beijing: China Railway Publishing House,2015.
[2] 方静赛. 铁道车辆转向架与车体振动同步研究[D].成都:西南交通大学,2015.
FANG Jingsai. Study on the vibration synchronization of the rolling stock bogie and carbody[D].Chengdu: Southwest Jiaotong University,2015.
[3] 周劲松,张洪,任利惠. 模态参数在铁道车辆运行平稳性研究中的运用[J].同济大学学报(自然科学版),2008,36(3):35.
ZHOU Jinsong, ZHANG Hong, REN Lihui. Application of modal parameter to ride quality improvement of railway vehicle[J]. Journal of Tongji University(Natural Science),2008,36(3):35.
[4] 张洪. 基于运行模态识别的铁路客车动力学特征研究[D].上海:同济大学,2005.
ZHANG Hong. A study on dynamic quality of railway passenger vehicle based on operational modal parameter identification technique[D].Shanghai: Tongji University,2005.
[5] 张洪,周劲松,任利惠,等. 基于运行模态参数识别的客车运行平稳性研究[J].铁道学报,2007,29(1):31.
ZHANG Hong, ZHOU Jin song, REN Li hui,etal. Research of riding stability of passenger cars based on operatinal modal parameter identification[J]. Journal of the China Railway Society,2007, 29(1):31
[6] DUMITRIU M. Numerical analysis of the influence of lateral suspension parameters on the ride quality of railway vehicles[J]. Journal of Theoretical and Applied Mechanics,2016,54(4):1231.
[7] SUAREZ B, MERA J M, MARTINEZ M L,etal. Assessment of the influence of the elastic properties of rail vehicle suspensions on safety, ride quality and track fatigue[J]. Vehicle System Dynamics, 2013, 51(2):280.
[8] 池茂儒,张卫华,曾京. 蛇行运动对铁道车辆平稳性的影响[J].振动工程学报,2008,21(6):20.
CHI Maoru, ZHANG Weihua, ZEN Jing,etal. Influence of hunting motion on ride quality of railway vehicle[J]. Journal of Vibration Engineering, 2008,21(6):20.
[9] HUANG C, ZENG J, LIANG S. Carbody hunting investigation of a high speed passenger car[J]. Journal of Mechanical Science and Technology, 2013, 27(8): 2283.
[10] IWNICKI S. Handbook of railway vehicle dynamics[M]. Boca Raton: CRC/Taylor & Francis, 2006.
[11] 朴明伟,李明星,赵强,等. 高铁车辆横向振动耦合机制及其减振技术对策[J].振动与冲击,2015,34(3):83.
PIAO Mingwei, LI Mingxing, ZHAO Qiang,etal. Lateral vibration coupling mechanism of high-speed rolling stocks and damping technical countermeasure[J]. Journal of Vibration and Shock,2015,34(3):83.
[12] 何旭升,吴会超,高峰. 高速动车组晃车机理试验研究[J].大连交通大学学报,2017,38(2):21.
HE Xusheng, WU Huichao, GAO Feng. Test study on carbody swing of hiang-speed EMUs[J].Journal of Dalian Jiaotong University, 2017,38(2):21.
[13] 潘春花. 地铁车辆悬挂系统的参数优化及失效分析[D].成都:西南交通大学,2012.
PAN ChunHua. The parameter optimization and failure analysis of the metro vehicle Suspension System[D]. Chengdu: Southwest Jiaotong University, 2012.
[14] WANG S, ZHANG T, CHENG L,etal. Comprehensive performance of compound fabrics in terms of electromagnetic shielding and wearability based on the Euclid approach degree of fuzzy matter elements[J]. Journal of the Textile Institute, 2016,108(3):1.
[15] 吴力士.通俗模糊数学与程序设计[M]. 北京:中国水利水电出版社,2008.
WU Lishi. Basic fuzzy mathematics and program design[M]. Beijing: China Water & Power Press,2008.
[16] XU Haiping, WANG Hsu-pin (Ben). Part family formation for GT applications based on fuzzy mathematics[J]. International Journal of Production Research, 1989, 27(9):1637.
[17] 谢开贵,胡博,欧阳稳,等. 基于灰色关联的应力盘驱力耦合度分析[J]. 重庆大学学报,2010,33(6):20.
XIE Kaigui, HU Bo, OUYANG Wen,etal, Coupling degree analysis of stressed-lap driving forces using the gray correlation technique[J]. Journal of Chongqing University,2010,33(6):20.
[18] 翟婉明. 车辆-轨道耦合动力学[M].北京:科学出版社,2007.
ZHAI Wanming. Vehicle-track coupling dynamics[M].Beijing: Science Press,2007.
猜你喜欢
防爆电机(2022年1期)2022-02-16
科技与创新(2020年19期)2020-10-09
哈尔滨铁道科技(2020年4期)2020-07-22
现代商贸工业(2020年24期)2020-07-17
汽车世界·车辆工程技术(中)(2020年1期)2020-07-09
铁道运营技术(2020年2期)2020-04-08
制造技术与机床(2019年12期)2020-01-06
电子技术与软件工程(2018年6期)2018-02-23
时代金融(2016年29期)2016-12-05
商场现代化(2016年1期)2016-03-18