
永磁变刚度机构柔性机器人力学特性研究
2018-03-01 10:25房立金孙兴伟
农业机械学报 2018年1期
张 明 房立金 孙 凤 孙兴伟
(1.东北大学机械工程与自动化学院, 沈阳 110819; 2.东北大学机器人科学与工程学院, 沈阳 110819;3.沈阳工业大学机械工程学院, 沈阳 110870)
0 引言
柔性变刚度机器人是不同于传统刚性机器人的一类刚度可调的柔性机器人,由于自身刚度可调,可以很大程度提高人机安全性和环境适应性,已经成为未来机器人发展的重要方向。
基于并联绳索对抗驱动的变刚度柔性机器人,在驱动方式上与人类肌肉骨骼系统最为接近,大都通过在绳索上串联非线性弹性部件的方式来改变刚度,此种布置的好处除了实现机器人的柔性外,可以将驱动单元和变刚度模块后置,特别是在构建多自由度柔性机器人时,可以极大地减轻操作臂的质量与惯量,从而解决传统串联模式质量与惯量逐级递增引起的刚度变化能力不足的缺点,因此并联绳索驱动的柔性机器人变刚度能力主要取决于非线性弹性部件性能的好坏。设计一款体积小、质量轻、变刚度能力强的弹性部件对于解决新一代机器人的人机安全、提高动态特性和轨迹跟踪等关键问题具有重要意义。文献[1-4]对国内外变刚度弹性部件的研究进行了综述,阐述了各类变刚度部件的结构、变刚度原理和应用场合;文献[5-14]对变刚度部件的变刚度原理和应用场合进行了进一步的研究,并根据实际需要进行了改进与优化;但以上文献中所涉及的变刚度弹性部件的变刚度能力与电动机输出力矩直接相关,在电动机提供的有效拉力范围内,刚度变化范围往往较小。本文在分析一对同向磁极相对布置环形永磁体及气隙磁导的基础上,结合滑轮绳索结构特性,提出一种在有效拉力范围内,实现较大的刚度调整范围的机械装置。结合稀土永磁体的工作特性,用虚位移法得出变刚度机构的轴向磁力和绳索拉力的解析数学模型并计算刚度,分析永磁体间磁力、绳索拉力及刚度与永磁体长度、平均半径、三角形结构底边长度、滑轮半径的关系,并通过实验方式对解析计算结果进行验证。
1 结构与工作原理
柔性变刚度机器人肘关节结构如图1所示。采用并联结构,相同的2个电动机各控制1组变刚度单元,当电动机以某种速度关系反向旋转时可以实现关节位置不变,刚度改变。当电动机以某种速度关系同向旋转时,可以实现关节位置改变,刚度不变。

图1 柔性变刚度机器人肘关节结构示意图Fig.1 Illustration of flexible variable-stiffness robot elbow joint
变刚度装置的结构如图2所示。该结构主要由磁弹簧单元和滑轮绳索单元构成。一对环形永磁体同轴,同磁极相对布置,由于滑道的限制,可移动永磁体只能沿轴向滑动,构成一组磁弹簧单元。磁弹簧轴向磁力和刚度随着气隙间距的减小呈非线性增加。可以根据力和刚度的要求,布置多组,一组是实现此功能的最少组数。滑轮绳索单元由一个动滑轮、2个定滑轮和绕在期间的绳索组成,动滑轮与定滑轮间呈等腰三角形布置。当在绳索上施加一定力时,动滑轮带动滑台向上移动,永磁体间气隙减小,夹角θ增加,绳索拉力增加,绳索刚度变化范围也进一步增加。在绳索拉力一定的情况下,永磁弹簧的非线性和绳索单元的非线性的组合使刚度的变化范围得以增加。通过改变磁弹簧单元和绳索单元结构参数,可以改变拉力和刚度曲线的变化范围和斜率,进而更好地应用到具体工况中[15-20]。

图2 变刚度装置示意图Fig.2 Illustrations of variable-stiffness mechanism1.定滑轮 2.动滑轮 3.动永磁体 4.滑道 5.定永磁体 6.固定基座
2 数学模型
该机构由1组结构参数相同的环形永磁体和滑轮绳索单元构成。首先建立一组永磁体间磁力模型(图2b),再建立绳索拉力和刚度的解析计算模型。
2.1 磁导计算
参照极间距g、半径r的异性圆柱磁极之间的磁导公式可以得到内径R1、外径R2、长度L的环形永磁体磁极气隙磁导Gg
(1)
其中
式中e——永磁体径向间距z——轴向间距μ0——空气磁导率
环形永磁体磁导可以表示为
(2)
式中μr——钕铁硼永磁材料磁导率
根据极间距g、半径r、长度L的圆柱体侧面磁导公式Gc=4μ0L′r/(1+g),其中L′≤L/2,取L′=L/2,得到环形永磁体内外2个侧面磁导Gc
(3)
根据圆柱形永磁体漏磁导公式可认为环形永磁体的漏磁导等于半径为R1和R2的2个圆柱磁体漏磁的导和,环形永磁体的漏磁导GL为
(4)
双环形永磁体构成的磁路系统总磁导Ga为
(5)
将式(1)~(4)代入式(5)可得
(6)
2.2 磁环间的磁通
根据磁通连续原理,对于永磁体和气隙组成的磁路有
(7)
式中Kf——磁路漏磁系数Bm——永磁体工作点磁通密度Sm——永磁体中磁路截面积Bg——气隙处磁通密度Sg——气隙处磁路截面积Hm——永磁体工作点磁场强度Lm——磁化方向的有效长度Kr——磁路磁阻系数Hg——气隙处磁场强度Lg——气隙处磁路长度
NdFeB等永磁材料具有线性退磁曲线[5]。由式(7)得气隙负载线方程为
(8)

(9)
式中Br——剩磁Hc——矫顽力α——气隙负载线与(-H)轴夹角
将式(9)代入式(7)得到磁路总磁通Φg
(10)
2.3 磁力、拉力与刚度的数学模型
轴向磁导偏导为
(11)
其中
依电磁场理论,永磁环间气隙磁能为W=Φ2/(2Gg),由虚位移法得到轴向磁力F为

(12)
(13)
式(13)为一组环形永磁体间轴向磁力的解析模型,可以发现,永磁环间磁力由永磁体结构参数和永磁间相对位置决定。
永磁体间磁力F与绳索拉力T关系可以表示为
2Tcos(π/2-α3)=F
(14)

(15)
式中r——三角结构底长d——三角结构高α3——绳索绕在动滑轮上角度的一半Z——环形永磁体间距
永磁体间轴向气隙间距z与绕在动滑轮与定滑轮间绳索总长的一半s的关系可以表示为
(16)
其中

式中r′——滑轮半径α5——绳索绕在定滑轮上的角度s2——动滑轮与定滑轮间公切线长
绳索刚度K可以表示为
(17)
式(13)、(15)、(17)为该变刚度机构永磁体间磁力、绳索拉力和刚度解析计算模型,为永磁体间气隙间距z的复杂函数。通过改变变刚度机构的结构参数,可以进一步调整绳索拉力与刚度的变化。
3 变刚度机构参数特性分析
变刚度机构参数如表1所示。

表1 变刚度机构参数Tab.1 Parameters of variable-stiffness mechanism
根据式(13)、(15)、(17)以及表1中的参数,可以计算变刚度机构的磁力、绳索拉力与刚度,根据解析计算模型对磁力、拉力和刚度与变刚度机构的结构参数的关系进行分析。
将钕铁硼N35H参数,以及表1中结构参数代入数学模型中,计算分析其力学和刚度特性。当轴向气隙z从0.5 mm变化到14.5 mm,保持等腰三角形结构高不变,三角形结构底边长r从16 mm变化到22 mm时,绳索拉力T的计算结果如图3所示。由结果可知绳索拉力T随着永磁体间轴向气隙间距z的减小而增大,且呈非线性变化,刚度变化规律与绳索拉力变化规律基本一致。这是由于在拉动绳索的过程中,永磁体间气隙减小,同级相对的环形永磁体间的气隙磁阻随轴向气隙位移z减小而减小,磁场强度随之增加,永磁体间磁力和刚度呈非线性增加,进而绳索拉力和刚度增加。绳索拉力T随着等腰三角形结构底边长r的增加而增加,这是由于三角形结构夹角θ随着底边长的增加而增加,永磁间磁力没有发生变化,绳索拉力增加。在拉动绳索的过程中,夹角θ随着永磁体间气隙的减小而增加,从而进一步增加了绳索拉力与刚度的变化范围。

图3 拉力理论计算与实验测量对比图Fig.3 Comparison of theoretical calculation and experimental measurement

图4 测量实验台照片Fig.4 Measurement test-bed photo1.z向单自由度微动平台 2.铝合金型材搭建的龙门框架 3.力传感器(Load Cell CXZ-114型,精度0.01 N) 4.固定于力传感器上环形永磁体 5.固定于x、y方向微动平台上环形永磁体 6.x、y方向两自由度微动平台 7.力值显示控制仪(XSB-I型)8.电涡流位移传感器 9.凯夫拉绳索 10.力传感器 11.滑轮绳索单元 12.磁弹簧单元 13.千分尺 14.大量程单自由度微动平台 15.轴向滑动轴承 16.单自由度微动平台
3.1 实验台搭建与实验测量
永磁变刚度机构实验台如图4所示,该机构由磁弹簧单元和滑轮绳索单元构成。一对环形永磁体同轴,同磁极相对布置,由于滑道和轴向滑动轴承的限制,可动环形永磁体在滑杆的带动下只能做上下往复运动。绳索一端固定于力传感器上,一端固定于大量程单自由度滑台上,并穿过位于滑杆末端动滑轮和位于单自由度移动滑台上的定滑轮,动滑轮与定滑轮呈等腰三角形布置。通过移动大量程单自由度移动滑台拉动绳索,进而带动动滑轮、滑杆和可动环形永磁体向上移动。通过左右对称布置的单自由度微动平台调整三角滑轮绳索结构的底边长r。通过千分尺调整三角滑轮绳索结构的高d。电涡流位移传感器检测气隙位移的改变量。在拉动绳索的过程中,力值显示控制仪读出绳索的拉力值。
永磁体间轴向气隙间距z从14.5 mm减小到0.5 mm,保持三角形结构高d不变,底边长r从16 mm增加到22 mm的过程中,绳索拉力的变化趋势如图3所示,其中半透明曲面为理论计算值,不透明曲面为实验测量值。从图中可以看出,理论计算与实验测量的绳索拉力变化趋势保持一致,但是理论计算值高于实验测量值,平均误差在6.76%以内,其原因在于数学模型没有考虑其他部分磁阻对磁路的影响,而实际情况永磁体间漏磁较严重,测试系统存在摩擦等。
3.2 永磁体间磁力与结构参数间关系
永磁体磁力测量平台如图4a所示,将一组参数相同的环形永磁体,同轴心、同级相对布置,分别固定于力传感器的测量头上和x、y方向两自由度微动平台的铝制凸台上。通过x、y方向两自由度微动平台和z向单自由度微动平台,可以对磁环间相对位置进行调整,并读出轴向气隙间距z,从力传感器显示仪读出轴向磁力F。
图5为环形永磁体的轴向磁力与轴向气隙间距关系的理论计算与实验测量对比。轴向气隙间距z从11.5 mm减小到1 mm的过程中,轴向磁力F随永磁体间轴向气隙间距z的减小,呈先平缓增加然后急剧增加的非线性变化趋势。理论计算与仿真结果的平均误差为1.6 N以内。其原因在于数学模型中没有考虑其他部分磁阻对磁路影响,以及实际情况永磁体间漏磁较严重等。
图6为环形永磁体轴向磁力与永磁体长度关系。保持环形永磁体轴向气隙间距z为3 mm,永磁体长度L从2 mm变化到9 mm过程中,轴向磁力F随永磁体轴向长度L的增加呈抛物线趋势先急剧增加,然后缓慢增加的趋势,这是由于随着永磁体长度的增加,退磁效应减弱引起的。

图5 轴向磁力与轴向气隙间距关系Fig.5 Relationship curve of axial magnetic force and axial air-gap
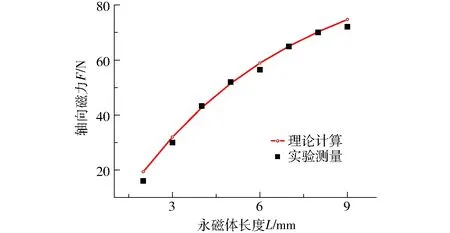
图6 轴向磁力与永磁体长度关系Fig.6 Relationship curve of axial magnetic force and magnet annular length

图7 轴向磁力与永磁体平均半径关系Fig.7 Relationship curve of axial magnetic force and magnetic annular coverage radius
图7为环形永磁体轴向磁力与永磁体平均半径关系。保持环形永磁体轴向位移z为3 mm和(R1-R2)为6 mm不变,永磁体平均半径R(R=(R1+R2)/2),轴向磁力F随永磁体平均半径的增加近似呈正比例线性规律增加。
通过实验测量与理论计算对比分析,发现该理论计算模型可以较直观地表达轴向磁力与永磁体参数的关系,进而表达永磁体参数对绳索拉力的影响。该模型是代数模型,计算简单且满足工程要求,具有较好的理论意义与工程应用价值。
3.3 刚度变化范围增加机理分析
永磁变刚度弹簧的工作范围是动滑轮上升高度不超过定滑轮的位置(z≤d)。当动滑轮上升高度超过定滑轮的位置(d 本文提出的永磁变刚度机构,采用磁弹簧单元与滑轮绳索单元组合。一对同轴同磁极相对布置环形永磁体间气隙减小时,永磁体间斥力呈非线性增加,刚度系数增加。同时在拉动绳索的过程中,绳索拉力方向与永磁间斥力方向夹角θ随着永磁体间气隙的减小而增加,绳索上的拉力会进一步增加,刚度变化范围也会进一步增加,实现较大刚度调整范围。 将变刚度机构参数代入计算模型,保持三角形结构底r为22 mm、高d为16 mm不变,环形永磁体轴向气隙改变量Z-z从0.5 mm变化为14.5 mm的过程中,轴向磁力、绳索拉力和刚度如图8和图9所示。可以看出绳索拉力和刚度相对永磁体间磁力和刚度变化范围都有所增加。改变滑轮半径,滑轮半径3 mm和4.5 mm分别代入计算模型。滑轮半径为4.5 mm的绳索拉力比永磁体磁力增加了5.67%,绳索刚度变化范围比永磁体刚度变化范围增加了22.08%;滑轮半径为3 mm的绳索拉力比永磁体磁力增加了47.39%,刚度变化范围比永磁体刚度变化范围增加了74.46%。绳索的刚度变化范围增加要比绳索拉力增加大得多,可以在不增加电动机力矩的同时实现更大的刚度调整范围。 图8 拉力变化关系对比曲线Fig.8 Changing curves of force and axial air-gap (1)提出了一种柔性机器人用永磁变刚度机构,在绳索拉力一定的前提下,增加了刚度的调整范围。 图9 刚度变化关系对比曲线Fig.9 Changing curves of axial stiffness and axial air-gap (2)利用虚位移法建立绳索拉力与刚度的解析数学模型。进行了理论计算与实验测量,计算和测量结果基本吻合,结果表明:绳索拉力随着永磁体轴向气隙间距减小而增加,绳索拉力和刚度随着永磁体长度和平均半径的增大而增加;保持等腰三角形结构高不变,底边长增加,也可以增加绳索拉力与刚度;减小滑轮半径可以进一步增加刚度变化范围。 (3)永磁变刚度弹簧的工作范围是动滑轮上升高度不超过定滑轮的位置(z≤d),在电动机力矩满足要求情况下,也可以采用d (4)永磁变刚度弹簧的非线性刚度特性,可调拉力和刚度范围特性,非常适合仿生柔性机器人的动力传输部件。其非接触和变刚度的特性也非常适用于高速及超洁净等工业应用领域。 1 李渊, 余跃庆. 并联机器人中柔顺关节代替传统关节可行性分析[J/OL].农业机械学报, 2016, 47(4): 343-348. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160445&flag=1.DOI: 10.6041/j.issn.1000-1298.2016.04.045. LI Yuan, YU Yueqing. Feasibility analysis of compliant joints insteaded of traditional joints in parallel robot[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(4): 343-348.(in Chinese) 2 王颜, 房立金. 机械式仿骨骼肌肉变刚度机构原理及设计[J]. 机器人, 2015,37(4): 507-511. WANG Yan, FANG Lijin. Principle and design of mechanically musculoskeletal variable-stiffness mechanism[J]. Robot, 2015, 37(4): 507-511.(in Chinese) 3 王伟, 刘立冬, 魏来,等. 柔性齿条式变刚度关节驱动器设计与研究[J].机械工程学报, 2016, 52(1): 26-32. WANG Wei, LIU Lidong, WEI Lai, et al. Design and research of rack-based variable stiffness actuator[J]. Journal of Mechanical Engineering, 2016, 52(1): 26-32. (in Chinese) 4 AMIR J, NIKOS G T, DARWIN G C. A novel intrinsically energy efficient actuator with adjustable stiffness[J]. IEEE/ASME Transactions on Mechatronics, 2013, 18(1): 355-365. 5 OSADA M, ITO N, NAKANISHI Y, et al. Realization of flexible motion by musculoskeletal humanoid “Kojiro” with add-on nonlinear spring units[C]∥IEEE/RAS International Conference on Humanoid Robots, 2010: 174-179. 6 NAKANISHI Y, ITO N, SHIRAI T, et al. Design of powerful and flexible musculoskeletal arm by using nonlinear spring unit and electromagnetic clutch opening mechanism[C]∥IEEE/RAS International Conference on Humanoid Robots, 2011: 377-382. 7 FRIEDL W, CHALON M, REINECKE J, et, al. Fas a flexible antag-onistic spring element for a high performance over actuated hang[C]∥IEEE/RAS International Conference on Robots and Systems, 2011: 1366-1372. 8 OSADA M, ITO N, NAKANISHI Y, et al. Stiffness readout in musculo-skeletal humanoid robot by using rotary potentiometer[C]∥IEEE Sensors Conference, 2010:2329-2333. 9 KUN X Q, PEI Z, WEI M R, et al. Novel magnetic spring and magnetic bearing[J]. IEEE Transactions on Magnetics,2003,39(1):559-561. 10 WILL R, BEN C, ANTHONY Z. A multipole array magnetic spring[J]. IEEE Transactions on Magnetics, 2005,41(10):3826-3828. 11 SUN Feng, ZHANG Ming, JIN Junjie, et al. Mechanical analysis of a three-degree of same-stiffness permanent magnetic spring [J]. International Journal of Applied Electromagnetics and Mechanics, 2016,52:667-675. 12 高海波, 邓宗全, 胡明,等. 行星轮式月球车移动系统的关键技术[J].机械工程学报, 2005,41(12): 156-161. GAO Haibo, DENG Zongquan, HU Ming, et al. Key technology of moving system of lunar rover with planetary wheel[J]. Journal of Mechanical Engineering, 2005, 41(12): 156-161. (in Chinese) 13 张云鹏, 刘淑琴, 李红伟,等. 基于磁路分析的轴向混合磁轴承径向承载力解析计算[J].电工技术学报, 2012, 27(5): 137-142. ZHANG Yunpeng, LIU Shuqin, LI Hongwei, et al. Calculation of radial electromagnetic force of axial hybrid magnetic bearing based on magnetic circuit analysis[J]. Transactions of China Electrotechnical Society, 2012, 27(5): 137-142. (in Chinese) 14 余跃庆,崔忠炜,赵鑫,等. 柔顺关节并联机器人设计与实验[J/OL]. 农业机械学报, 2013, 44(7): 274-278. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130747&flag=1. DOI: 10.6041/j.issn.1000-1298. 2013.07.047. YU Yueqing, CUI Zhongwei, ZHAO Xin, et al. Design and experiment of parallel robot with compliant joints[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(7): 274-278. (in Chinese) 15 孙凤, 张明, 孙兴伟,等. 三自由度等刚度永磁弹簧的力学特性研究[J].中国机械工程, 2015, 26(8): 1005-1009. SUN Feng, ZHANG Ming, SUN Xingwei, et al. Study on mechanics characteristics of 3-DOF same-stiffness permanent magnetic spring[J]. China Mechanical Engineering, 2015, 26(8): 1005-1009. (in Chinese) 16 陈伟海, 陈竞圆, 崔翔,等. 绳驱动拟人臂机器人的刚度分析和优化[J].华中科技大学学报, 2013, 41(2): 12-16. CHEN Weihai, CHEN Jingyuan, CUI Xiang, et al. Stiffness analysis and optimization of a novel cabledriven anthropomorphic-arm manipulator[J]. Huazhong University of Science and Technology, 2013, 41(2): 12-16. (in Chinese) 17 杨红, 赵韩. 稀土永磁弹簧的力学特性研究 [J]. 农业机械学报, 2003, 34(1): 111-117. YANG Hong, ZHAO Han. Study on dynamic characters of rare earth permanent magnetic spring[J]. Transactions of the Chinese Society for Agricultural Machinery, 2003, 34(1): 111-117. (in Chinese) 18 田录林, 李言, 王山石, 等. 双筒永磁向心轴承磁力工程化解析算法研究[J]. 中国电机工程学报, 2007, 27(6): 57-61. TIAN Lulin, LI Yan, WANG Shanshi, et al. Research on magnetism engineering analytical calculation method for bi-barrel-shaped radial permanent magnetic bearings[J]. Proceedings of the CSEE, 2007, 27(6): 57-61. (in Chinese) 19 孙立军, 张涛, 赵兵. 永磁磁轴承数学模型的研究[J].机械工程学报, 2005, 41(4): 69-74. SUN Lijun, ZHANG Tao, ZHAO Bing. Study of mathematical model of permanent magnet bearings[J]. Chinese Journal of Mechanical Engineering, 2005, 41(4): 69-74. (in Chinese) 20 田录林, 李言,安源,等. 轴向放置轴向磁化的双环永磁轴承径向磁力研究[J].中国机械工程, 2007, 18(24): 2926-2929. TIAN Lulin, LI Yan, An Yuan, et al. Research on the radial magnetic force of axial placement and axial magnetization bi-annular-shaped PMB[J]. China Mechanical Engineering, 2007,18(24): 2926-2929. (in Chinese)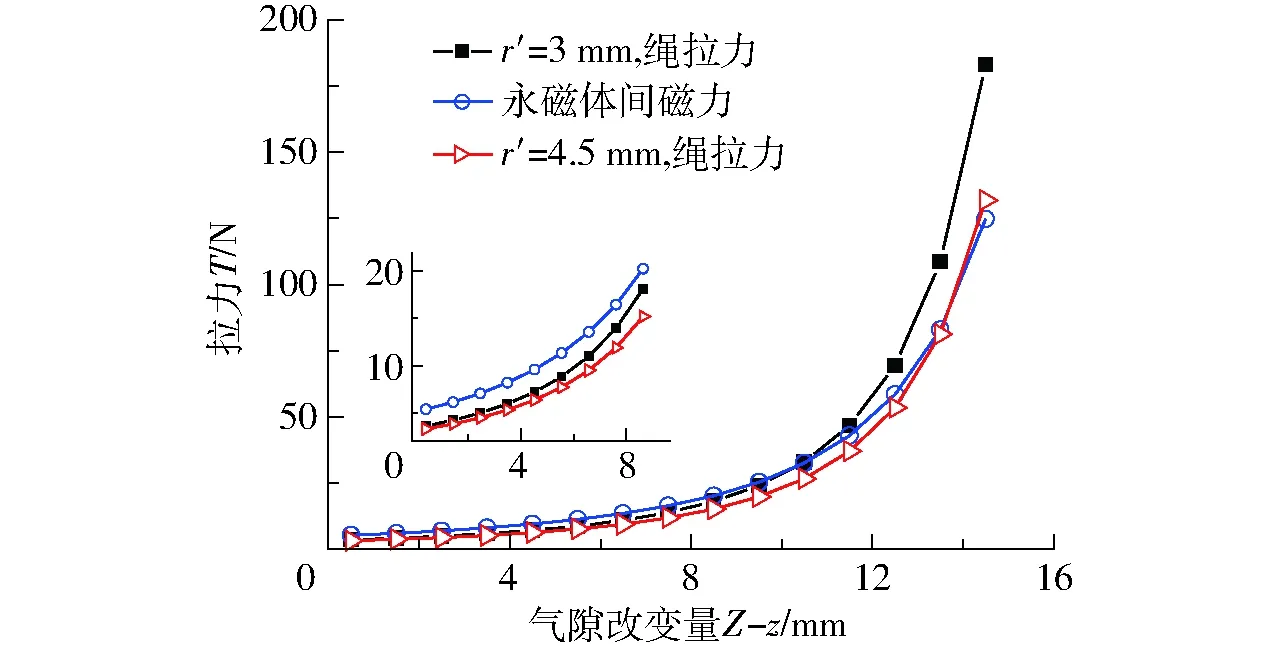
4 结论
 猜你喜欢
电机与控制学报(2022年5期)2022-06-23大电机技术(2022年1期)2022-03-16计算机仿真(2022年1期)2022-03-01格言·校园版(2021年22期)2021-09-27智慧少年·故事叮当(2021年3期)2021-06-29初中生世界·七年级(2021年12期)2021-01-21微特电机(2020年11期)2020-12-30学苑创造·B版(2019年8期)2019-08-09
猜你喜欢
电机与控制学报(2022年5期)2022-06-23大电机技术(2022年1期)2022-03-16计算机仿真(2022年1期)2022-03-01格言·校园版(2021年22期)2021-09-27智慧少年·故事叮当(2021年3期)2021-06-29初中生世界·七年级(2021年12期)2021-01-21微特电机(2020年11期)2020-12-30学苑创造·B版(2019年8期)2019-08-09
