
武术擂台机器人的研制与实践
2018-03-02 12:22朱思宇刘刚瞿志二吐鲁逊江·克热木
数字技术与应用 2018年12期
朱思宇 刘刚 瞿志二 吐鲁逊江·克热木


摘要:本文针对中国机器人大赛中武术擂台机器人比赛规则,设计并制作出武术擂台机器人硬件系统,探索出一种攻防兼备的控制策略,实战证明该方案达到了预期的目标。
关键词:机器人;STM32;边缘检测
中图分类号:TP242 文献标识码:A 文章编号:1007-9416(2018)12-0039-02
0 引言
武术擂台赛是中国机器人大赛中参赛队最多、竞争最激烈、最富有观赏性的赛事:两个具有自主行动的机器人在2.4m×2.4m的擂台上,通过传感器来辨别自身方位的同时,并感知对手的位置、方向,然后开展攻击的对抗性机器人竞赛。在设计、制造、训练、比赛一系列过程中,参赛者的综合工程素质、创新能力、动手能力、团队协作能力都能得到全面的培养和提升。
本文重点研究了机器人硬件系统及竞赛策略。
1 机器人主要硬件系统设计
1.1 系统设计与组成
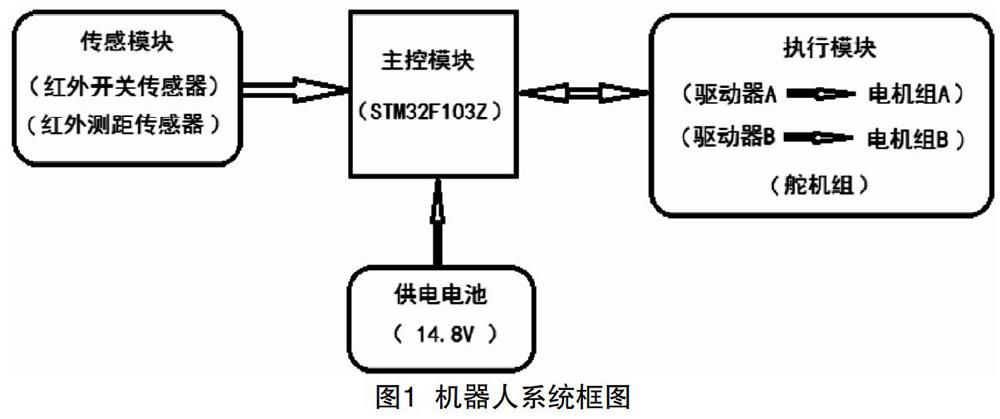
为了适应竞赛要求增强机器人的上台能力机器人采用前高后低设计结构,其底板外形尺寸为260mm*250mm的长方形,底板距离地面高度前面35mm,后面25mm;总体系统设计共采用了四轮差速方案,由8个红外开关传感器、4个红外测距传感器组成;执行模块由4个舵机和4个直流电机构成,直流电机型号为BDMC1203驱动,14.8V/3A锂电池供电;主控模块选用以STM32F103Z为核心的Luby控制器。
如图1所示,机器人硬件系统由主控模块、传感模块、执行模块和供电电池四部分组成。
1.2 主控模块
机器人采用STM32F103Z核心芯片为主控板,STM32F103Z是一种低功耗控制器,丰富的IO接口,方便扩展可实现各个模块的功能要求。
1.3 传感模块
传感器模块由8个红外光电传感器和4个红外测距传感器组成:底板下面正前、后、左、右,及顶部左前、右前、右后、左后各一个红外开关传感器;底板下面、前、后、左、右各一个红外测距传感器。
红外开关传感器利用了障碍物对光束的漫反射作用,通过同步回路电路接通,从而检测物体的有无障碍物。
紅外测距传感器是测量障碍物到传感器接收探头的间距。所采用的GP2D12由红外发射端、PSD(位置敏感检测装置)及相关处理电路构成,输出为0~2.5V的模拟量(电压、距离相关),量程范围10~80cm。
1.4 执行模块
由4个直流电机,2个BDMC1203驱动器组成的四轮差动设计方案。四路直流电机分别安装于底盘的左右两侧,每组两个,电机的取值决定转速,取值越大,转速越快。
2 攻防策略应用
策略是机器人的灵魂,是武术擂台机器人参赛获胜的关键。核心问题有:首先是机器人尽快完成自主登台,其次是防止自身掉台,且防止自身掉台的优先级高于检测敌方机器人。
2.1 自主登台
常见登台方式有两种,一种是利用机器人高速冲击惯性使机器人冲上擂台,这种方式对于车上的传感器、自身结构损伤加大,对于电机的驱动要求较高,且不稳定;另一种如图2所示是在机器人车体上增加适当机械结构,安装舵机,依靠机械结构完成自主登台,这种登台方式较容易实现,容易控制,被广泛采纳。
2.2 检测机器人是否在擂台上
利用前后左右四个测距传感器综合判断是否位于台上。在擂台下时,首先要检测机器人朝向。以前方对擂台为例:此时前方底部传感器检测到擂台,其他均未检测到擂台。机器人是否在擂台上的流程如图2所示:
2.3 边缘检测
如前、后、左、右4个光电开关中,3个检测到擂台,1个未检测到时,表明在该方向机器人继续前进时可能会掉台。需要采取远离擂台边缘的措施。以左前方擂台边缘检测为例,流程图如图3所示:
2.4 敌方检测
敌方探测利用机器人底部正前、后、左、右的四个红外开关传感及相对应的红外距离传感器合作完成。例如当正前方检测到敌方机器人时,正前方光电开关传感器灭,此时我方机器人加速向前推进直至敌方机器人落台(但同时还应防止自身同时掉台);当左侧检测到敌方机器人时,左侧光电开关传感器灭,我方机器人需左转,此时敌方机器人相当于由左方回到正前方,我方机器人直接加速向前推进即可。
3 结语
本文较全面研究了武术擂台大赛用机器人的设计及策略。在老师的指导下,利用该机器人参加竞赛获得了良好的比赛成绩。说明该设计是合理的。
参考文献
[1]党金哲,高晶敏,李明慧.一种基于AVR单片机控制的武术擂台机器人设计[J].传感器世界,2018(06):22-28.
[2]赵磊,李卫国,王利利.新型非标准平台武术擂台机器人的研究与实践[J].机械管理开发,2016(7):9-10.
[3]王鑫,许晓飞,靳宸.武术擂台赛机器人自主登台方案设计[J].电子技术设计与应用,2016(10):69-70.
[4]王择,李响,胡金鑫,王浩冉,李鑫,刘赛赛.用于武术擂台赛的仿人智能机器人设计[J].现代计算机(专业版),2016,(19):54-58.
Analysis and Practice of WUSHU Arena Robot
ZHU Si-yu,LIU Gang,QU Zhi-er,TULU Xun-jiang·Ke Re-mu
(School of Instrument Science and Optoelectronic Engineering, Beijing Information Science & Technology University,Beijing 100192)
Abstract:Based on competition rules of WUSHU Arena Robot at China Robot Competition, this thesis designed and manufactured a kind of robot hardware system and explored out a control strategy equally good at attack and defense, which get the expected target proved by actual combat.
Key words:robot;STM 32;edge detection
