基于立方星的高性能空芯磁力矩器设计
2018-03-04 19:04白博周军王圣允
西北工业大学学报 2018年1期
白博, 周军, 王圣允
(西北工业大学 精确制导与控制研究所, 陕西 西安 710072)
立方星(CubeSat)的概念最早由加州理工大学San Luis Obispo教授和斯坦福大学Bob Twiggs教授共同提出并制定了立方星相关标准[1]。“1U”立方星是以一个边长10 cm的立方体作为一个标准单元。在此基础上,立方星可进行升级,增大为“2U”(20 cm×10 cm×10 cm)至“12U”(30 cm×20 cm×20 cm)的结构[2]。其设计理念是通过标准化设计,减少卫星的研发制造成本[3]。
其中,磁力矩器作为卫星姿态控制的执行机构,由于其结构轻便、成本低、功耗小等优势,在地磁场强度较强的近地轨道卫星上应用十分广泛[4-6]。根据是否含有磁介质,磁力矩器可分为带磁芯的磁力矩器[7]与空芯磁力矩器2大类[8]。
目前,国际上已经有很多磁力矩器的现成产品。例如,南非的CubeSpace公司生产的带芯磁力矩器,它可以产生较大的磁矩,然而如果三轴同时使用这种磁力矩器,将占用立方星较大的体积。荷兰Hyperion Technologies生产的带芯磁力矩器,它通过加粗其中一个轴的直径来弥补磁芯变短产生的力矩降低。空芯线圈也可以产生磁力矩。文献[9]介绍了TUGSAT-1卫星上使用的空芯磁力矩器,其缺点是产生的磁矩较小。文献[10]介绍了荷兰代尔夫特理工大学研制的Delfi-n3Xt立方星磁力矩器,它采用了2根带芯磁力矩器与1套空心磁力矩器。
而将磁力矩器应用于立方星上时,由于需要遵循立方星的标准,因此需要在一定尺寸与功耗的限制下进行磁力矩器设计。文献[11]虽然对空芯磁力矩器的磁矩、质量、功耗与各物理量之间的关系进行了推导,但并未考虑各物理量在一定约束条件下的优化设计问题。冯乾等人在文献[12]中,针对空芯磁力矩器给出了优化设计的方法,但该文献将质量与功耗作为了设计的限制,而未作为设计目标来考虑,且未考虑随着线圈的缠绕所导致面积增大的问题。本文将综合考虑空芯磁力矩器的质量、功耗与磁矩等因素,使得在有限功耗和尺寸的情况下,能够获得最大的磁矩输出,从而能够更好地应用于体积与功耗都有限的立方星中。
本文首先建立了空芯磁力矩器的磁矩与功耗模型,并分析了各因素对磁力矩器设计的影响。对功耗、质量、磁矩进行多目标优化设计。最后针对所设计的参数制作了实际的磁力矩器,并对实物进行了测试,验证了设计的可行性与有效性。
1 模型建立
1.1 磁矩模型
空芯磁力矩器一般是用漆包线缠绕出一个闭合形状的线圈制成。由于不存在磁性材料,空芯磁力矩器的磁矩M与真空中载流线圈的磁矩是一致的,定义为总电流与其围绕面积的乘积,
M=NIA(1)
式中,I为通过漆包线的电流;N为所绕漆包线总的匝数;A为漆包线所围绕的闭合形状的面积。
为了适应立方星尺寸的需要,空芯线圈所围绕的形状一般为正方形,假设线圈围绕在如图1所示的一个方形支座上。
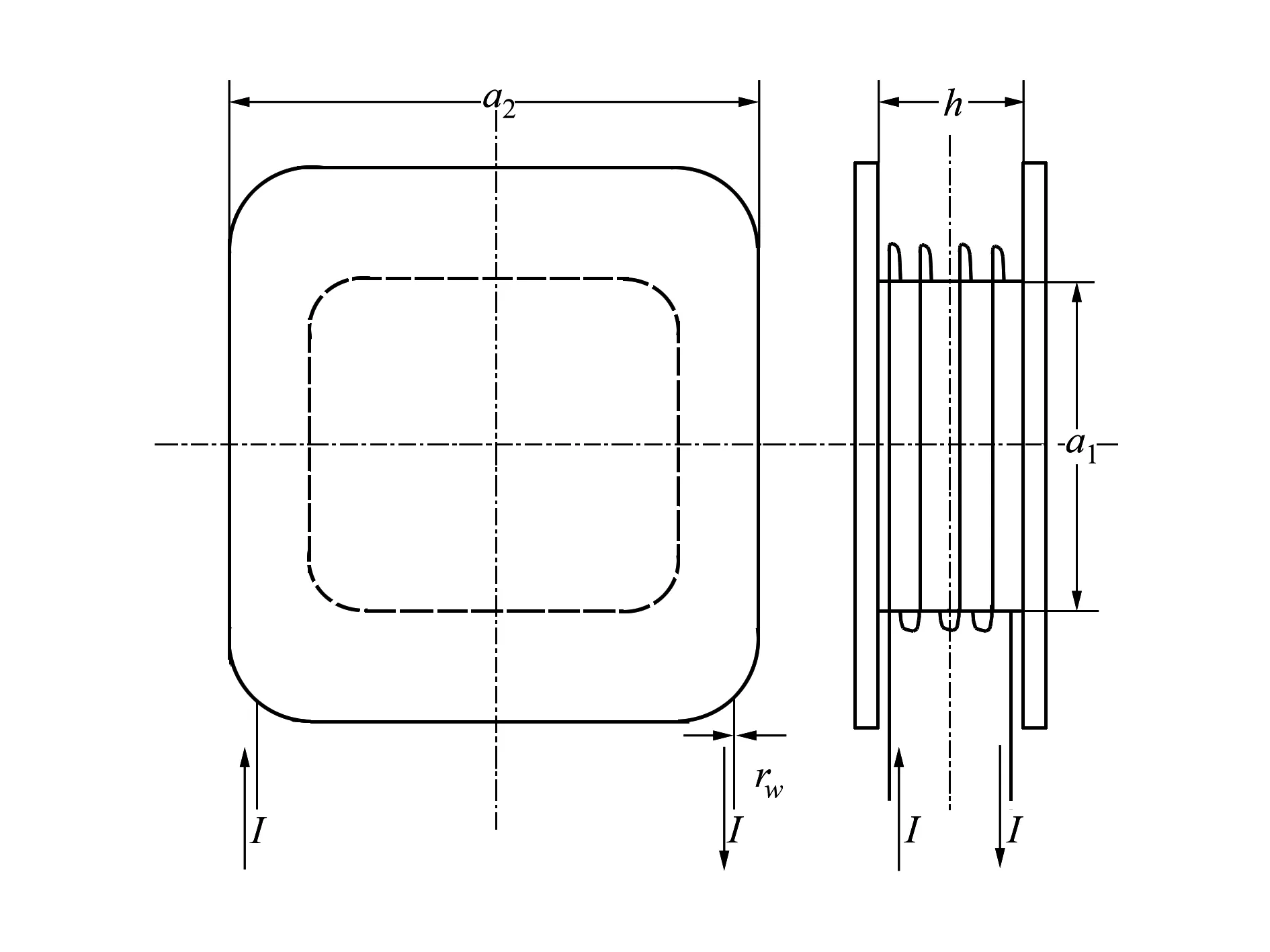
图1 空芯磁力矩器结构简图
图中,a1与a2分别为方形支座的内部和外部边长;h为方形支座可绕线部分的高度;rw为漆包线的半径;I为通过漆包线的电流。
若假设漆包线是一个挨一个紧密排列在支座上,且当绕满一层后,漆包线仍可以在底层上再绕多层,每层之间的漆包线也是一个挨着一个紧密排列。当在方形支座上绕了n层漆包线后,所绕漆包线总的匝数N可由下式计算得出:
(2)
由于漆包线是密绕的,因此层数n可由a1、a2以及rw计算得到
(3)
考虑到绕在支座上第1层漆包线的一圈周长为4(a1+4rw),紧挨着这一层上边第2层漆包线的一圈周长为4(a1+8rw),依此类推,绕在最外边第n层漆包线的一圈周长为4(a1+4nrw),同时考虑到每层都有N/n圈漆包线,则漆包线的总长Lw为:
(4)
将以上线圈总匝数N与层数n分别代入(4)式,可得到仅由h,a1,a2以及rw表示的漆包线总长Lw为:
(5)
若假设所绕漆包线的电阻率为ρ,横截面面积为Sw,则所绕漆包线的总电阻R为:
(6)
假设在线圈两端所施加的电压为U,则通过漆包线的电流I为
(7)
考虑到随着漆包线围绕层数的增加,线圈的围绕面积会逐渐增大,如果简单地按照公式(1)磁矩的定义来进行计算,则最终所计算的磁矩会偏小。考虑磁矩按照漆包线一圈一圈地加和,则磁矩M可按照下式计算:
+(a1+4nrw)2]=
(8)
由(8)式可以较容易看出,空芯线圈的磁矩与绕线支座的高度h无关;增大支座的外部边长a2,线圈包围面积增大,则磁矩变大。假设采用a2=0.07 m的支座,则在U=5 V的情况下,磁矩随着漆包线半径rw与支座内边长a1的变化关系可由图2看出。
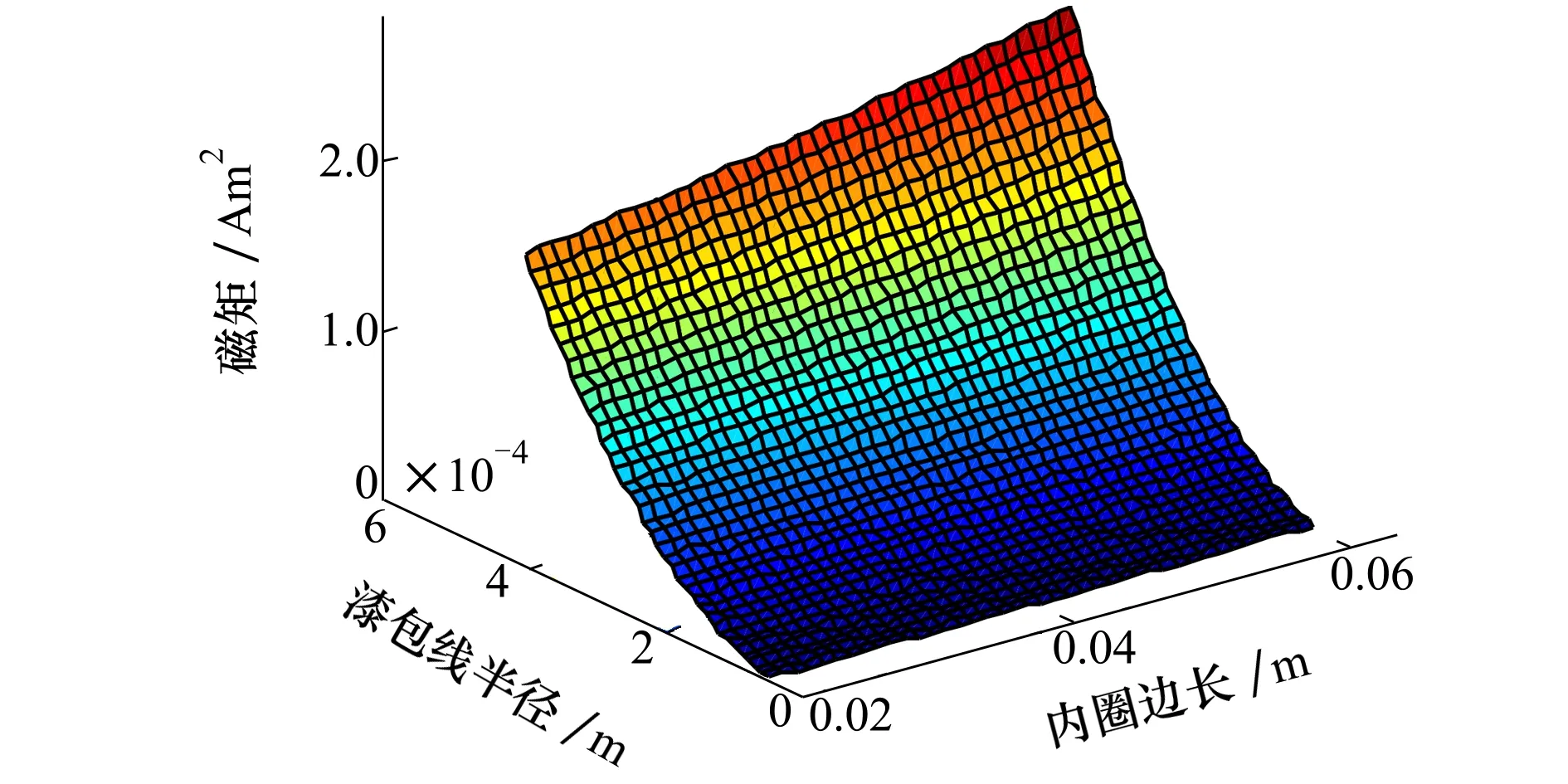
图2 磁矩随漆包线半径与支座内边长的变化趋势
由图中可以看出,当支座内边长a1一定时,漆包线的半径rw越粗,磁矩就越大;当漆包线半径rw一定时,支座内边长a1的增加虽然也会使得磁矩增大,但增加量比较小。
由此可见,在电压一定的情况下,增大漆包线半径rw、增大支座内部与外部的边长等措施都会使得磁矩增大。但对于质量、体积和功耗都有限的立方星来说,增大磁矩意味着功耗的增加,因此,仍需要考虑影响质量与功耗的因素。
1.2 质量模型
当仅考虑漆包线的质量时,假设漆包线的密度为γ,则由导线长度Lw与导线横截面积Sw,可求得漆包线的质量Mw为
(9)
由(9)式可见,增大漆包线半径rw、增大支座外部边长a2、减小支座内部边长a1、增大绕线支座的高度h等措施会使得漆包线质量增加。
1.3 功耗模型
由电压U与电阻R,可得功耗P
(10)
由(10)式可见,在电压一定的情况下,增大漆包线半径rw、增大支座内部边长a1等措施虽然会使磁矩增大,同时也会使得功耗增加。
因此要想在立方星有限的体积和功耗限制下,设计出磁矩较大的空芯磁力矩器,需要综合考虑各量之间的平衡。
2 多目标优化
2.1 优化设计
由以上分析可以看出,空芯磁力矩器在设计过程中,各个变量之间相互制约,单纯追求一个变量的最大化将导致其他变量恶化。因此,为了平衡各个变量,使磁力矩器整体达到最佳工作状态,需要对空芯的磁力矩器进行多目标优化。
选取支座内边长a1、漆包线半径rw、支座可绕线部分高度h、支座外边长a2这4个量为多目标优化的设计变量。用向量表示为:
(11)
考虑到立方星1U空间的尺寸限制,按照最长边长为70 mm的限制,同时考虑高度约束为8 mm,则这几个量需满足以下约束条件:
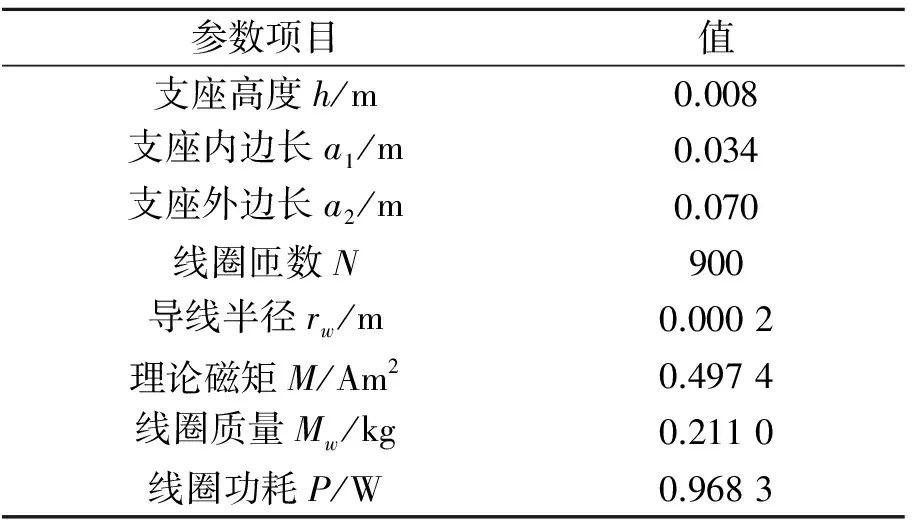
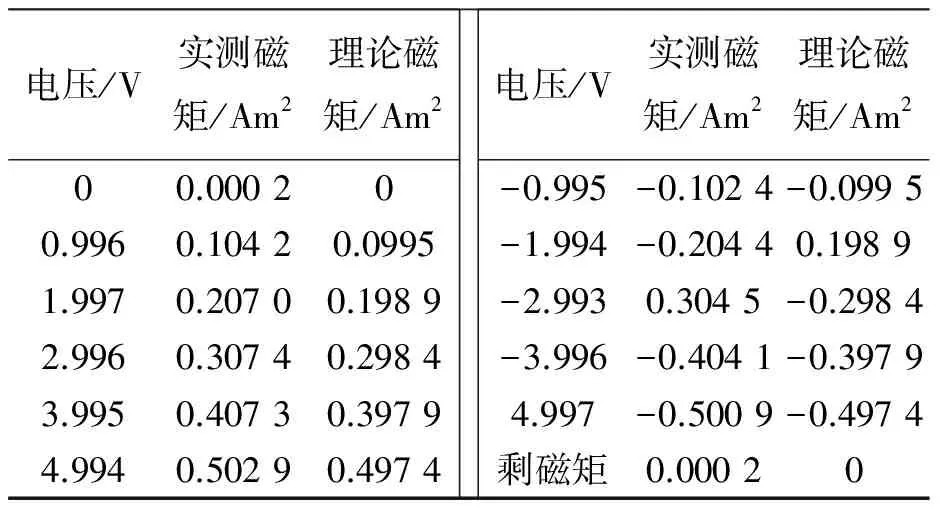
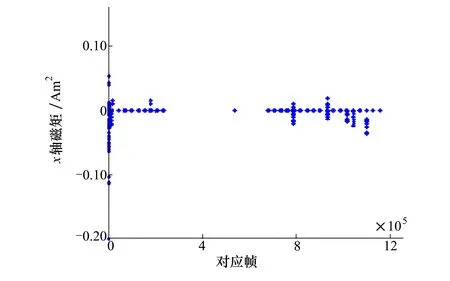
0.02≤a1 (12) 0.000 05≤rw≤0.000 5,0.001≤h≤0.008 (13) 优化目标是使得线圈质量Mw与功耗P均较小的情况下,使得磁矩M较大。由于这3个目标是相互矛盾的,需要同时对这3个物理量进行优化,因此选取如下的目标函数: (14) 采用遗传算法对目标函数进行最小化的寻优,经过250次迭代后,可得目标函数F(X)的变化情况如图3所示。 图3 目标函数变化情况 从图中可知,得到适应度F的最小值为3.192,对应各参数为:h=0.007 99 m、a1=0.033 90 m、rw=0.000 200 m、a2=0.069 97 m。按照该参数计算可得磁力矩器输出磁矩M1=0.497 8 Am2,功耗P1=0.972 4 W,质量Mw1=0.210 9 kg。 根据上一节所求得各物理参数的最优值,选取符合工程实际的物理量。则最终空芯磁力矩器实现的参数如表1所示。 表1 磁力矩器实现参数 由于缺乏直接测量磁矩的方法和手段,因而在测试中采用文献[12]所给出的方法,间接测量线圈中心处所产生的磁感应强度。随后通过磁感应强度反推出磁矩。 根据方形通电线圈中心位置处的磁感应强度公式 (15) 式中,μ0=4π×10-7N/A2为真空中的磁导率,其他各量与上文定义一致。将(15)式右侧同时乘以线圈包围的面积,则可得到磁感应强度与磁矩之间的关系如(16)式所示 (16) 由(16)式可知,磁矩的测量将转换为在线圈中心位置处磁感应强度的测量。 具体测量的电压与磁矩的数据如表2所示。 表2 磁力矩器磁矩测量数据 将电压与磁矩的关系绘制成曲线如图4所示,具体测量的功耗数据如表3所示,由表中可以看出,所设计的磁力矩器在产生0.502 9 Am2磁矩的同时,功耗仅为0.969 W,且线性度误差小于1%。磁力矩器磁矩的实验结果和理论值的误差小于1.1%,剩磁矩小于0.001 Am2。 图4 电压与磁矩的关系 电压/V电流/A功耗/W0.9970.0390.0391.9960.0770.1542.9950.1160.3473.9930.1540.6154.9960.1940.969电压/V电流/A功耗/W-0.996-0.0390.039-1.993-0.0770.153-2.997-0.1160.348-3.990-0.1550.618-4.994-0.1930.964 图5 翱翔之星上的磁力矩器工作情况 本文所设计的磁力矩器已经在包括世界首颗12U立方星“翱翔之星”等多颗立方星上得到了应用。图5为“翱翔之星”上磁力矩器的工作情况。由图中可以看出,磁力矩器在立方星初期入轨消旋阶段工作比较频繁,后期立方星姿态稳定后工作频次有所减缓。磁力矩器在整个卫星的生命周期内运行稳定良好,证明了设计方案的正确性和可行性。 通过本文的分析,可以得到如下的结论: 1) 空芯磁力矩器所产生的磁矩不仅与所缠绕的漆包线直径有关,还与线圈的围绕面积有关。因此,在设计空芯磁力矩器时需要进行综合考虑。 2) 当需要满足立方星的标准时,磁矩、功耗与质量是互相矛盾的物理量,需要采用多目标优化的方法进行设计。最终从磁力矩器的具体实现和测试结果可以看出,本文所设计的磁力矩器质量轻、功耗小、剩磁小。这对于设计适合于立方星使用的磁力矩器提供了一些有益的参考。 [1] Twiggs R. Small Satellites: Past, Present, and Future[M]. Segundo, California, the Aerospace Press, 2008: 151-157 [2] Fish C S, Swenson C M, Crowley G, et al. Design, Development, Implementation, and On-Orbit Performance of the Dynamic Ionosphere CubeSat Experiment Mission[J]. Space Science Reviews, 2014, 181(4):61-120 [3] 于晓洲, 周军, 朱林妤. 低热层大气探测立方星翱翔一号轨道寿命分析[J]. 西北工业大学学报, 2013, 31(6): 896-900 Yu Xiaozhou, Zhou Jun, Zhu Linyu. Life Time Analysis of Chinese Aoxiang-1 CubeSat of Lower Thermosphere Research[J]. Journal of Northwestern Polytechnical University, 2013, 31(6): 896-900(in Chinese) [4] Si J T, Gao Y, Abadi C. Slew Control of Prolate Spinners Using Single Magnetorquer[J]. Journal of Guidance Control and Dynamics, 2016, 39(3): 715-723 [5] Anton H J R. Magnetic Control of Dual-Spin and Bias-Momentum Spacecraft[J]. Journal of Guidance Control and Dynamics, 2012, 35(4): 1158-1168 [6] Nobuo S, Toshinori K, Kazuya Y. Attitude Determination and Control System for Nadir Pointing Using Magnetorquer and Magnetometer[C]∥2016 IEEE Aerospace Conference, Big Sky, MT, USA, 2016: 1-15 [7] Mohamad F M, Mehran M. Design of Manufacturing of a Research Magnetic Torquer Rod[J]. Contemporary Engineering Science, 2010, 3(5): 227-236 [8] Degrandi R H, Heroe W, Budi S, et al. Design of Attitude Determination and Control System Using Microstrip Magnetorquer for Nanosatellite[C]∥2016 International Conference on Control, Electronics, Renewable Energy and Communications, Bandung, Indonesia, 2016: 65-69 [9] Koudelka O, Egger G, Josseck B, et al. TUGSAT-1/BRITE-Austria——The first Austrian Nanosatellite[J]. Acta Astronautica, 2009, 64(11): 1144-1149 [10] Bouwmeester J, Reijneveld J, Hoevenaars T, et al. Design and Verification of a very Compact and Versatile Attitude Determination and Control System for the Delfi-N3XT Nanosatellite[C]∥2012 Small Satellites Systems and Services, Portorož, Slovenia, 2012: 1-5 [11] 张凌云, 郭雷, 杨照华. 微纳卫星用空芯磁力矩器的设计与实现[C]∥中国宇航学会深空探测技术专业委员会第五届学术年会, 长沙, 2008: 34-37 Zhang Lingyun, Guo Lei, Yang Zhaohua. Design and Implementation of the Air Core Magnetic Torquer for Micro/Nano Satellite[C]∥Proceedings of the Fifth Annual Conference of China Aerospace Society Deep Space Exploration Technology Specialized Committee, Changsha, 2008: 34-37 (in Chinese) [12] Feng Q, Liu Y, Li L, et al. Optimal Design and Implementation of Coreless Magnetic Torque for Nano-Satellites[C]∥Proceedings of the 32nd Chinese Control Conference, Xi′an, 2013: 5609-5613
2.2 线圈实现
3 测试结果与分析
3.1 测试方案
3.2 测试结果


4 结 论
猜你喜欢
铜业工程(2021年5期)2021-12-22
小学生学习指导(中年级)(2021年10期)2021-11-01
铜业工程(2020年5期)2020-11-11
航天器工程(2019年3期)2019-07-31
学苑创造·B版(2019年6期)2019-07-12
数字海洋与水下攻防(2019年2期)2019-06-28
中国测试(2016年3期)2016-10-17
铜业工程(2016年3期)2016-08-16
中学数学杂志(高中版)(2015年3期)2015-05-28
上海航天(2014年1期)2014-12-31