
大学生方程式赛车多连杆悬架设计及优化
2018-03-05 12:31朱建军张志亮
机械设计与制造 2018年2期
王 乐,朱建军,田 宇,张志亮
(太原理工大学 机械工程学院 车辆工程系,山西 太原 030024)
1 引言
多连杆式悬架是指由三根或三根以上的连杆构成,并能提供多个方向控制力的悬架[1],相比于现有的双横臂悬架与麦弗逊悬架等其他悬架其空间自由度更为灵活,且能提供更大的横向与纵向刚度,给予轮胎更好的抓地力,既有横臂式悬架的特点,也有纵臂式悬架的特点,是这两种悬架结构形式的综合[2]。该类型悬架大多应用在一些高级轿车上[3],其在赛车上的应用一直由于它的开发周期长,设计难度大,空间布置复杂等因素受到限制。
另外,多连杆悬架不同于双横臂悬架,其虚拟主销轴线的设计和控制一直是其应用推广的难题,文献[4-5]分别采用瞬时螺旋轴法与近似数值法寻找多连杆主销,其研究方法均基于数字化求解和归纳,过程与计算复杂。为了缩短悬架开发周期,降低开发成本,提高悬架设计与制造质量,论文首次采用“二次瞬轴法”设计多连杆并将其应用到某大学生方程式赛车中。利用ADAMS/Car模块精确建立某方程式多连杆与转向系统的虚拟样机模型,通过双轮同向激振对该多连杆悬架特征参数(主销后倾角,外倾角,前束角及悬架抗制动纵倾性)仿真,同时应用ADAMS/Insight模块对前轮定位参数设计方案进行多目标优化分析和仿真试验,从而精确地预测所设计的悬架机构在各种不同工作条件下的动态性能。
2 多连杆悬架自由度计算与模型建立
2.1 多连杆自由度计算
典型多连杆悬架为五连杆悬架与四连杆悬架。就前悬架系统而言,车轮需满足转向自由度与轮跳自由度,其限制自由度的方法主要通过控制臂杆端的连接副,而根据实际情况,将多连杆应用到该赛车选用关节轴承作为铰接副,每个杆端轴承可限制3个空间自由度,转向拉杆也采用关节轴承与其他构件连接,转向机部分采用移动副连接到车架。根据自由度计算公式:

式中:F—构件自由度;Pi—i级副[6]。
假设该悬架系统为x连杆悬架单侧悬架系统构件包含:车轮部分(1个),控制臂部分(x个),转向拉杆(1个),转向机部分(1个);运动副包含:控制臂内外端球形副(2x个),转向拉杆内外端球形副(2个),转向机移动副(1个);局部自由度包含:控制臂自身转动自由度(x个),转向拉杆自身转动自由度(1个)。因此,整个悬架系统自由度平衡方程为:

通过求解得到前悬架连杆控制臂的数目为4。
2.2 多连杆悬架模型建立
在建立该多连杆悬架模型时做如下简化:(1)为便于空间力系的分解,所有控制臂均简化为二力杆几何模型。(2)所有零部件都认为是刚体,零部件的所有连接均简化为刚性铰链。(3)设计初期旨在建立悬架运动特性几何模型,因此模型中不包含避震系统与防倾杆[7]。初选多连杆悬架虚拟主销参数,如表1所示。
表1 多连杆悬架虚拟主销参数Tab.1 Kingpin Parameters
根据表1相关参数而得到具有两个自由度的(车轮自身转动为局部自由度,因此此处未单独列出)前悬架右侧几何结构模型,如图1所示。
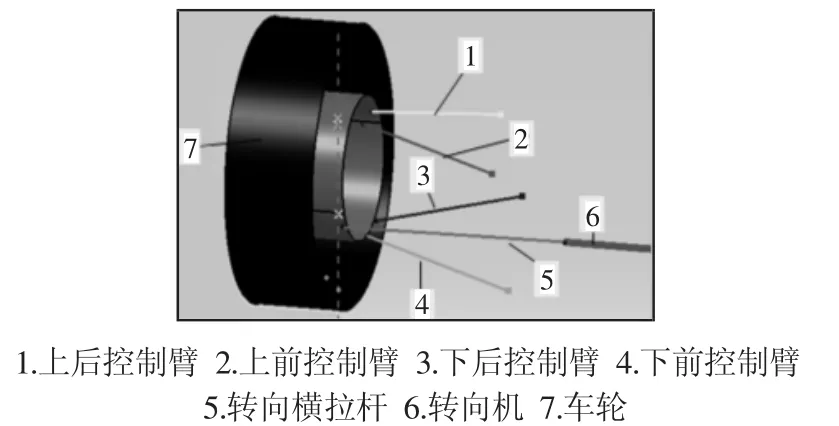
图1 前多连杆前悬架右侧几何结构模型Fig.1 Right Geometry Model of Multi-Link Front Suspension
设计多连杆几何模型时采用“二次瞬轴法”,如图2所示。即两次采用瞬轴法分解车轮的复杂运动,第一次将该多连杆前悬架空间四连杆机构解析为绕车轮跳动轴线的跳动运动,即跳动瞬轴(赛车侧视几何纵倾中心与赛车正视几何中瞬时转动中心的连线),第二次解析为绕虚拟主销轴线转动的运动即虚拟主销(车轮转向运动过程中围绕的空间虚拟转动轴线);通过逆向开发设计静态虚拟主销与单侧车轮跳动瞬时轴线,以正视几何与侧视几何保证车轮运动过程中的基本自由度;控制臂外硬点结合轮辋内部空间设计,内硬点结合抗制动纵倾性与车架空间位置初步确定,后期结合动力学仿真软件对其运动学参数进行仿真与优化,从而达到设计要求。
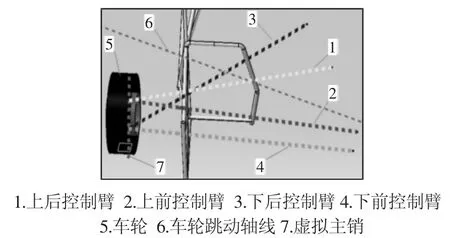
图2 “二次瞬轴法”确定虚拟主销Fig.2 Second Instantaneous Axis Method
最终得到前多连杆悬架右侧实体结构,如图3所示。

图3 前多连杆前悬架右侧实体结构Fig.3 Multi-Link Front Suspension on the Right Side of the Solid Structure
3 运动特性仿真与优化设计
3.1 前悬架与转向系统虚拟样机建立
根据2.1节自由度分析计算结果与图1的多连杆悬架空间结构初步确定控制臂、转向拉杆等相关硬点坐标(Hardpoint)以及构件几何体,具体建模过程不再赘述,需要指出的是在定义该多连杆前悬架虚拟主销轴线时选择瞬时轴法(Instant Axis)设定,论文选择摇臂作为主销定义参照部件,摇臂下硬点为参照硬点,系统通过固定摇臂的垂向位移,转动转向节自动定义出主销轴线。有关各部件运动学约束参照2.1节所述建立。转向部分硬点坐标,如表2所示。
再依据各机构之间的运动学约束,对模型添加相关约束,并对转向子系统与悬架子系统进行装配。装配后的模型,如图4所示。
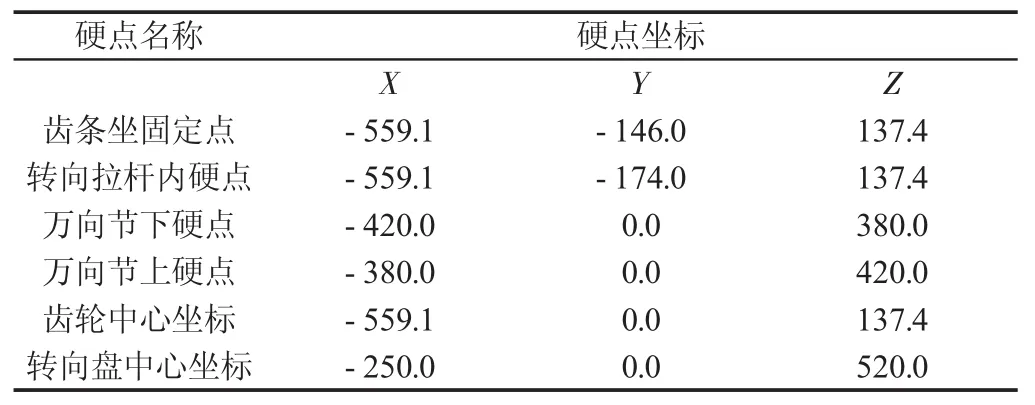
表2 转向系统各硬点坐标Tab.2 Steering Hardpoint Table

图4 前悬架与转向系统装配模型Fig.4 Suspension and Steering System Assembly Model
3.2 前悬架运动特性仿真分析
为了分析赛车在高速转弯过程中出现的转向回正力过大、过度转向趋势、轮胎抓地力不足,同时也为改善赛车前轴轮胎偏磨与制动抗点头带来的关节轴承间隙过大现象,根据3.1节所建立的虚拟样机进行双轮同向激振仿真试验,因大赛规则要求悬架上下跳动量应大于一英寸(25.4mm),设计其上下跳动行程为(±30)mm,其他试验参数,如表3所示。
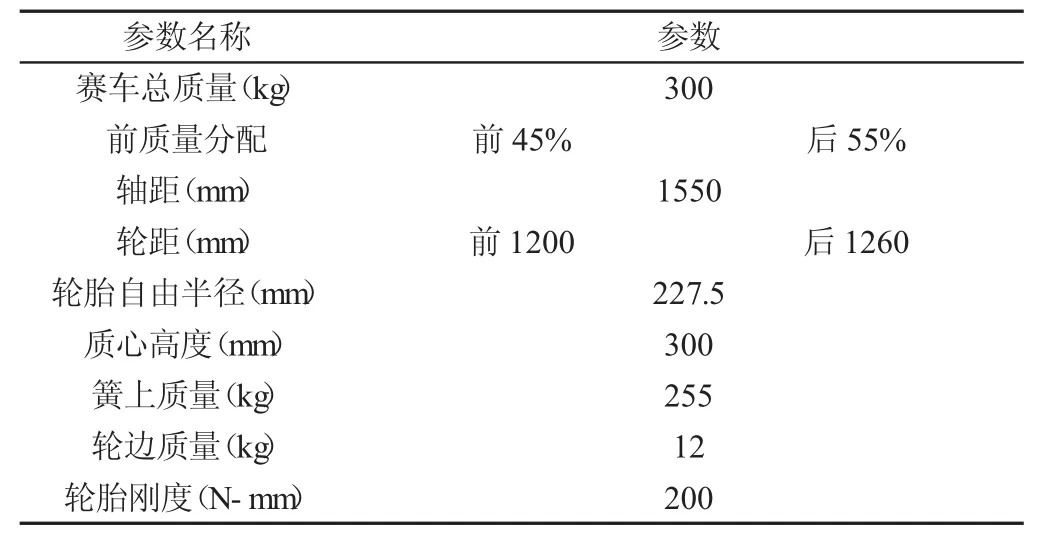
表3 整车相关参数Tab.3 The Vehicle Parameters
应用Adams/Postprocessor模块评定主销后倾角,车轮外倾角,前束角以及悬架抗制动纵倾性四个参数,仿真结果显示在优化前后对比,如图6~图9所示。
3.3 优化设计
3.3.1 影响因子分析
根据仿真结果对目标参数做DOE优化设计,将优化目标导入ADAMS/Insight模块。考虑到赛车选用十英寸轮辋,内部空间有限,其外硬点坐标可优化范围有限,且容易造成立柱加工难度,扩大制造成本。优化设计针对四条控制臂与转向横拉杆内硬点Y、Z坐标(硬点名称与坐标如表3所示),(±10)mm,设计规范(Design Specification)分别选择试验设计响应面(DOE Response Surface),交互式(interactions)和全因子法(Full Factorial)从而执行1024次迭代仿真,可得到各硬点坐标对目标参数的影响系数,如图5所示。
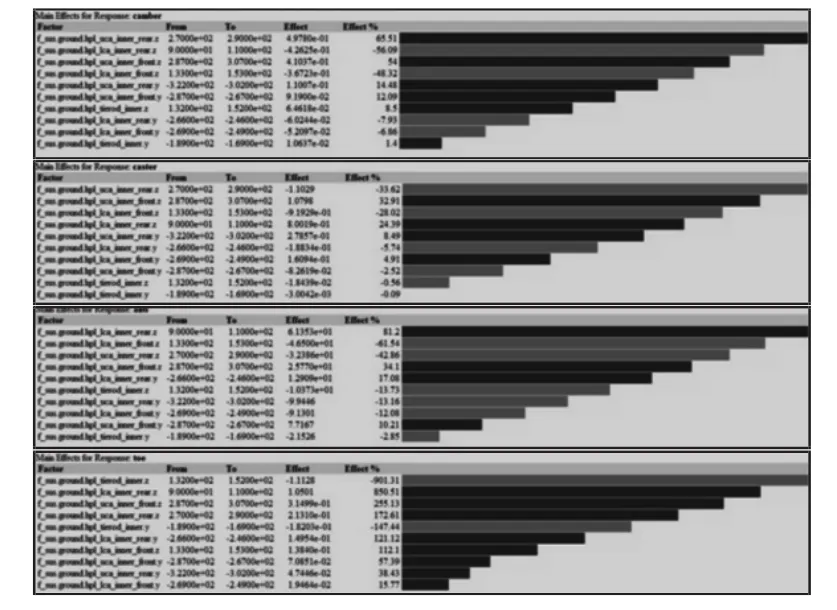
图5 各硬点坐标对目标参数的影响Fig.5 Effect of the Hardpoint Coordinates on the Target Parameters
由影响因子分析结果可知,影响主销后倾角、车轮外倾角、前束角的主要是上下控制臂内硬点Z坐标,其Y坐标与转向拉杆坐标对其影响较小,影响悬架抗制动纵倾性的主要因素为转向横拉杆Z坐标与各硬点Z坐标,部分因子大于100%意味着该目标值的变化大于平均目标值变化的%。
3.3.2 优化设计过程
介于各因素对目标参数的交互影响,防止手动更改硬点带来的部分参数极端变化,将DOE仿真结果显示于ADAMS/Insight模块,通过优化(Optimize)专用模块对影响因素进行多目标优化设计,其中多目标方法选择总平方差法(Total Squared Cost),需要强调的是在选择各优化运算符时主销后倾角,车轮外倾角以及前束角均选用过程最小化法(Min to),即响应大于目标值时将其最小化,当响应小于目标值时忽略该响应。目标值设定为3.2节仿真曲线极限最小绝对值。抗制动纵向倾性基本达到设计要求,因此在优化过程中选择忽略(ignore)运算符。运行多目标仿真后得到各硬点变化,如表4所示。
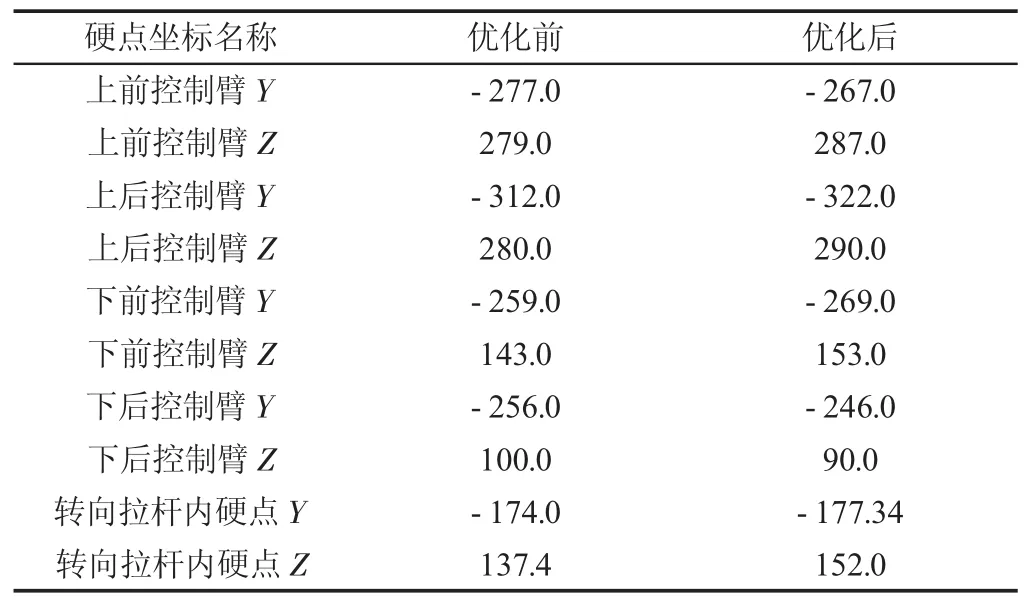
表4 各影响因素优化前后坐标对比Tab.4 Influence Factors Before and After Optimization
3.4 优化结果分析
在装配体下将表三优化后对应的硬点修改,再次执行双轮同向激振仿真试验,绘制优化前后主销后倾角,外倾角,前束角及悬架抗制动纵倾性随车轮平行跳动时的变化曲线,其中,实线为优化前变化曲线,点划线为优化后变化曲线。后倾角变化一般要求随车轮上跳增加,用以抵消制动点头时后倾角减小,回正力矩不足,影响赛车操纵稳定性能。变化过大将使得转向轮产生摆振效应,同时使转向回正力变化率过大[8]。
由图6得出该多连杆悬架主销后倾角静态值为3.9°,在上跳极限达到最大值4.87°,下跳极限达到最小值3.22°,单向跳动工况变化值为0.87°,变化相对过大。经优化主销后倾角保持原有变化趋势,最小值达到3.24°,最大值为4.66°,单向变化量由原来的0.87°减小到0.74°,优化效果略小。
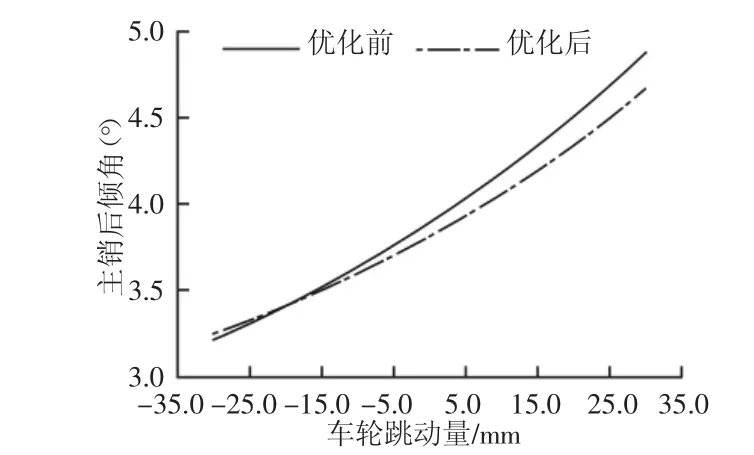
图6 优化前后主销后倾角随平行轮跳变化曲线对比Fig.6 Caster Angle Curve Before and After Optimization
赛车在制动与过弯工况下都希望车轮外倾角能够保持尽量小的变化,在平行上跳时希望其向负外倾变化,下跳过程中保持正外倾变化,与前束角配合从而提高轮胎侧偏刚度,同时可增加赛车不足转向趋势,有利于提高赛车稳定性[9]。
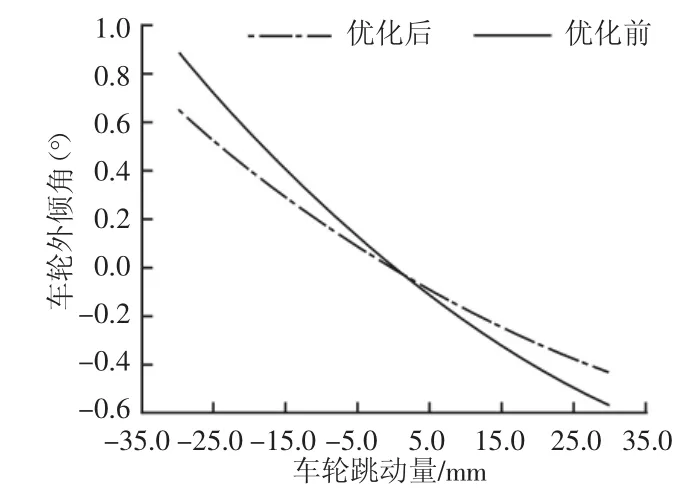
图7 优化前后车轮外倾角随平行轮跳变化曲线对比Fig.7 Camber Angle Curve Before and After Optimization
由图7可得此优化前后车轮外倾角变化趋势均较为理想,优化前在平行下跳工况达到达到最大值为0.89°,平行上跳工况达到最小值为-0.56°,单向跳动变化量略大,优化后外倾角单向最大变化量由优化前的0.89°降低到0.77°,总变化量由1.46°降低到1.08°,优化效果较为明显。
前束角与外倾角作用相反,负的前束角使得赛车在行驶过程中产生正的侧偏角,能够增加增加赛车不足转向趋势。在设计过程中希望在轮胎上跳时保持负的变化,下跳时变化相反,且变化值尽可能小。
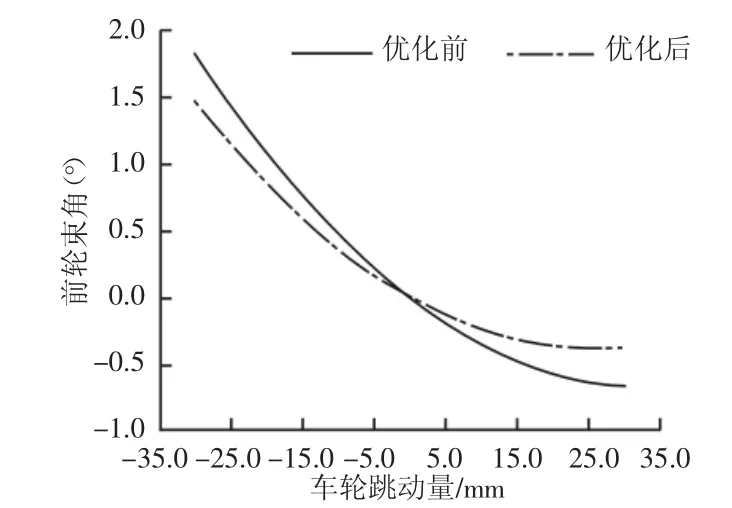
图8 优化前后前束角随平行轮跳变化曲线对比Fig.8 Toe Angle Curve Before and After Optimization
由图8可知该多连杆悬架上跳过程中前束角保持负值变化,最小值达到-1.82°;下跳过程中保持正值变化,最大值达到0.65°。总跳动量为2.47°,单侧变化量超过1°,经优化单向最大变化量由优化前的1.82°降低到1.46°,优化效果也较为明显,且最大变化值出现在车轮平行下跳极限即加速工况,因此优化结果可以接受。
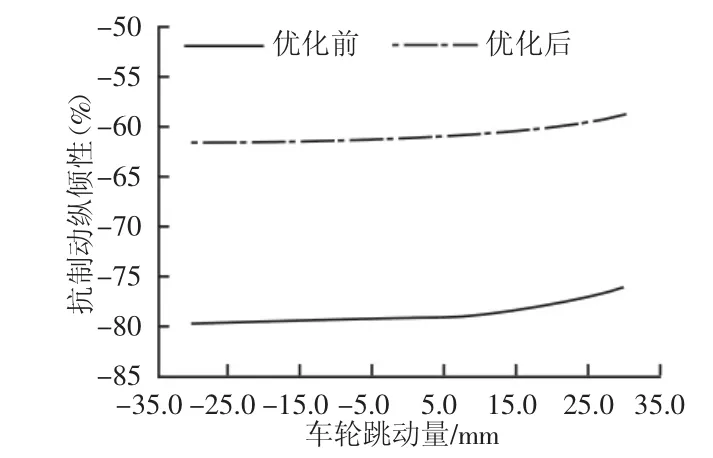
图9 优化前后抗制动纵倾性随平行轮跳变化曲线对比Fig.9 Anti Dive Braking Curve Before and After Optimization
抗制动纵倾性是通过设计多连杆空间结构使其铰链在制动过程中克服部分载荷转移,从而使得车头下沉量减小,对于乘用车而言一般设计值取(50~70)%[10],赛车制动减速度远大于乘用车,可以适当增大该设计值。但需要说明的是由于方程式赛车悬架控制臂杆端采用关节轴承,且其属于二力杆,因此其抗制动纵倾性也不可过大,容易造成杆端关节轴承磨损严重,从而导致摆振效应。
由图9知优化后的抗制动纵倾性由优化前的(76~79)%降低为(58~61)%,属于设计期望值范围。
4 结论
(1)首次采用“二次瞬轴法”设计多连杆悬架虚拟主销,并经过多体动力学仿真验证了此方法的可行性;
(2)为改善悬架运动特性,应用Adams/Car模块对其主要影响参数主销后倾角、车轮外倾角、前束角以及抗制动纵倾性做双轮同向激振仿真,仿真结果显示各参数变化量较大需要优化;
(3)采用Adams/Insight模块对影响以上参数的控制臂硬点坐标做灵敏度分析(各控制臂与转向拉杆内硬点Y、Z坐标),并对目标参数进行多目标优化设计,经优化后的主销后倾角能够提供适当的转向回正力,外倾角与束角共同作用改善了轮胎的贴地性,同时,悬架抗制动纵倾性也得到明显改善。
[1]奉铜明,钟志华.基于NSGA-II算法的多连杆悬架多目标优化[J].汽车工程,2010,32(12):1063-1066.(Feng Tong-ming.Zhong Zhi-hua.Multi-objective optimization for multi-link suspension based on NSGA-IIAl gorithm[J].Automotive Engineering,2010,32(12):1063-1066.)
[2]高晋.基于虚拟样机技术的悬架K_C特性及其对整车影响的研究[D].吉林:吉林大学,2010:17.(Gao Jin.Research of suspension K&C character and its influence on full vehicle based on VPT[D].Jilin:Jilin University,2010:17.)
[3]杨树凯.多连杆悬架与双横臂悬架运动学和弹性运动学特性分析[J].设计·计算·研究,2006(12):5-8.(Yang Shu-kai.Analysis of kinematics and elastokinematics characteristics between multi-link and double wishbone suspension[J].Design Calculation Research,2006(12):5-8.)
[4]宋健.多连杆式前悬架主销轴线的确定[J].公路交通科技,2001,18(6):99-102.(Song Jian.Analysis of kingpin axis of multi-link front suspension[J].Journal of Highway and Transportation Research and Development,2001,18(6):99-102.)
[5]祁宏钟.确定五连杆悬架悬架虚拟主销轴线的近似数值方法[J].机械设计与制造,2002(1):57-58.(Qi Hong-zhong.An approximate method to analyze the imaginary kingpin axis in five-link suspension systems[J].Machine Design&Manufacture,2002(1):57-58.)
[6]申永胜.机械原理教程[M].北京:清华大学出版社,1999:21.(Sheng Yong-sheng.Theory of Machines and Mechanisms[M].Beijing:Tsinghua University Press,1999:21.)
[7]秦洪武,刘军.多连杆式前是架的转向定位参数仿真计算研究[J].机械设计与研究,2002,18(3):19-21.(Qing Hong-wu,Liu Jun.Research on the simulation and calculation of the steering and positioning parameters of multi link front frame[J].Machine Design and Research,2002,18(3):19-21.)
[8]倪俊,徐彬.FSAE赛车双横臂前悬架运动学仿真及优化[J].车辆与动力技术,2011(4):51-54.(Ni Jun,Xu Bin.Kinematics simulation and optimization of double wishbone front suspension for a FSAE car[J].Vehicle & Power Technology,2011(4):51-54.)
[9]吴健瑜.FSAE 赛车双横臂悬架优化设计[J].机械设计与制造,2011(10):120-122.(Wu Jian-yu.Optimization of double-wishbone independent suspension for FSAE racing car[J].Machinery Design & Manufacture,2011(10):120-122.)
[10]王望予.汽车设计[M].北京:机械工业出版社,2004:204.(Wang Wang-yu.Automobile Design[M].Beijing:Mechanical Industry Press,2004:204.)
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
汽车零部件(2022年3期)2022-03-29
科学咨询(2021年31期)2021-12-29
汽车工程(2021年5期)2021-06-09
中国铁路(2020年7期)2020-10-09
汽车实用技术(2019年16期)2019-09-11
科技信息·下旬刊(2018年9期)2018-10-21
北京汽车(2018年2期)2018-05-02
中国设备工程(2018年7期)2018-04-21
北京汽车(2016年6期)2017-01-06
