
随动转向半挂汽车列车机动性分析
2018-03-05 12:31田晋跃陈治领王新成
机械设计与制造 2018年2期
田晋跃,陈治领,韩 顺,王新成
(1.江苏大学 汽车与交通工程学院,江苏 镇江 212013;2.镇江宝华半挂车有限公司,江苏 镇江 212003)
1 引言
随着我国高速公路建设的发展,半挂汽车列车充分发挥甩挂运输、区段运输和滚装运输的优势,已成为我国公路物流运输的主要形式。为提高半挂汽车列车的运输生产率,同时满足道路法规和轴荷要求,汽车厂家大多采用增加半挂车车轴的方法,但纯粹增加半挂车刚性轴,半挂车的机动性、通过性及操纵稳定性将会降低,轮胎非正常磨损加剧[1-2]。随动桥是提高半挂汽车列车转向机动性和减轻轮胎磨损的一种有效技术路线,根据转向控制原理不同,随动桥可分为主动控制式和被动控制式两类[3]。目前国外主要对主动式随动桥进行研究,对于被动式随动桥的研究较少。而国内对两种随动桥的转向运动特性均缺乏相关深入的研究,国内汽车企业采用的随动桥产品大都依靠引进国外技术。
2 随动桥的基本结构和转向原理
2.1 随动桥的基本结构
德国某公司的LL系列被动式随动桥,具有结构简单,占用空间小,适应性强等优点,可实现最大27°转角。该随动桥总成主要包括轴梁、转向节总成、转向横拉杆、转向减震器、锁止气缸、空气悬架和鼓式制动器等。
相对于普通半挂车刚性桥,该随动桥的关键技术是转向节总成,局部视图,如图1所示。包括一对波形压力轴承,如图2所示、轴衬、主销和预紧弹簧等部件。上下波形压力轴承均先通过弹性柱销实现定位,然后分别焊接在车轴和转向节上。主销顶部加工一段盲孔,孔中安装一个预紧弹簧,可确保两个波形压力轴承始终啮合。其中主销与转向节过盈配合,主销与车轴为间隙配合。
当半挂汽车列车倒车或高速行驶时,为保证行驶方向的稳定性,随动桥必须被锁止[4]。控制单元ECU接收并分析车轮轮速传感器传递的信号,将控制指令传递给锁止气缸,活塞杆推动锁止块进入锁止气缸支座的卡槽中,使转向横拉杆锁止。
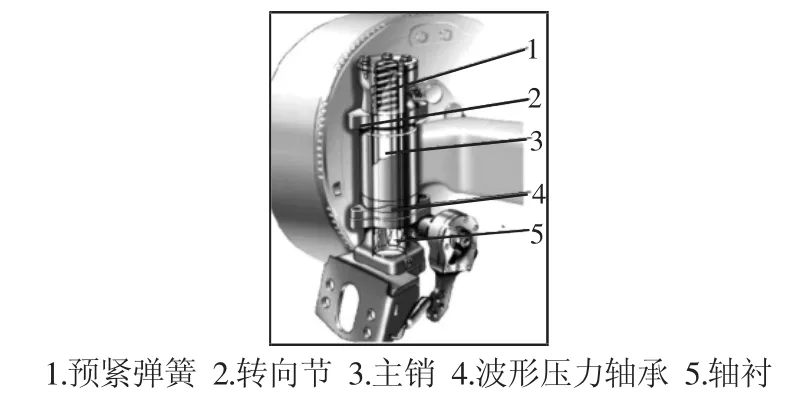
图1 随动桥转向节局部图Fig.1 The Local Image of Self-Steer Axle Knuckle

图2 波形压力轴承三维模型Fig.2 The 3D Model of Thrust Washers
由于不平路面或侧向风的影响,车辆直线行驶时,车轮会受到来自地面的侧向力的作用。为保持行驶的稳定性,随动桥配有转向减振器。其作用有两方面,第一是作为稳定装置,衰减车轮的抖动;第二由于减震器阻尼的存在,会产生一个稳定力矩,当转向力矩小于稳定力矩,可以使车轮及时回正[5]。
2.2 随动桥的转向原理
随动桥和前桥一样,具有相应的车轮定位参数,最关键的是主销后倾角,若主销后倾角较小,则转向主力矩会无法克服摩擦阻力矩,使得随动桥转向困难,转向灵敏度降低;过大的主销后倾角将产生较大的转向力矩,使其在恢复直线行驶时回正困难,通常主销后倾角取为8°。
假设随动转向半挂汽车列车在行驶过程中,前转向桥向左转向,如图3所示。驾驶员操纵转向盘使前桥车轮向左转过一定角度,为保证前桥和随动桥的瞬时转向轴线相交同一点O,半挂车第三轴车轮应向右转过一定角度。车轮转向时产生绕瞬时转向中心O的离心力,其方向指向外侧车轮,同时在地面与车轮的接触点会产生作用于车轮的侧向反力,与离心力大小相等,方向相反。由于主销向后倾斜,侧向反力与主销轴线会存在力臂,故侧向反力可使车轮绕主销转动。当转向力矩克服波形压力轴承摩擦阻力矩和轮胎摩擦阻力矩后,波形压力轴承与间发生错动,车轮会绕主销转动。当车辆恢复直线行驶时,车轮受到的侧向反力消失,下波形压力轴承在车辆重力作用下恢复到直线行驶对应的位置,配对波形压力轴承再次保持紧密啮合状态[6]。
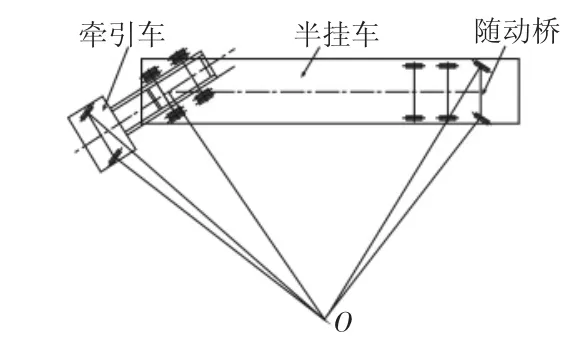
图3 随动转向半挂汽车列车转向示意图Fig.3 Turning Diagram of Self-Steering Semi-Trailer Truck
3 整车模型的搭建
根据半挂汽车列车的结构和参数,在ADAMS/Car中建立动力传动系统、循环球式转向系统、驾驶室、前悬架、牵引车导向杆式平衡悬架、随动转向半挂车平衡悬架和普通半挂车平衡悬架等模型。钢板弹簧均采用间接离散梁法构建,轮胎模型采用FTire模型。半挂车和牵引车通过牵引座连接,在牵引车车架模型中建立相应的牵引座部件。
根据建立的随动桥总成三维模型,建立其虚拟样机模型。为模拟波形压力轴承间的摩擦,建立一个基于运动副的运动制动器,其作用于转向节和车轴间的旋转副。由于半挂车的第三轴轮胎磨损最为严重,应优先改善半挂车第三轴质心对牵引座中心的轨迹跟随性,减轻转向过程中轮胎的侧滑,如图4所示。将普通三轴半挂车的第三轴设计为随动桥。

图4 随动转向半挂车悬架模型Fig.4 Suspension Model of Self-Steering Semi-Trailer
在Adams/Car标准模式下,将建立各个子系统和整车试验台进行装配,分别建立普通半挂汽车列车和随动转向半挂汽车列车整车模型(俯视图隐藏半挂车几何体),如图5、图6所示。
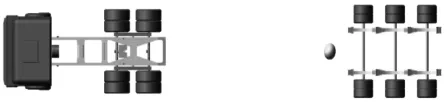
图5 普通半挂汽车列车整车模型俯视图Fig.5 Plan View of Common Semi-Trailer Truck

图6 随动转向半挂汽车列车整车模型俯视图Fig.6 Plan View of Self-Steering Semi-Trailer Truck
4 仿真结果与分析
参考国内外半挂汽车列车低速机动性仿真试验和样车试验相关文献,对建立的两个整车模型进行满载低速转向机动性分析,包括低速360°转弯和角阶跃转向试验。由当车速超过35km/h时,锁止机构会将转向横拉杆锁住,故仅考虑低速10km/h。
4.1 低速360°转弯
对于低速360°转弯试验,不同国家要求半挂汽车列车满足的通道圆的内外径不同,且不同标准采用的最低行驶车速不同[7-9]。主要研究随动桥和刚性桥对半挂汽车列车的机动性影响,对于路径和车速可以根据软件要求和车型选择,通过修改Adams/Car共享数据库中现有的驾驶员控制文件和驾驶员控制参数文件,建立行驶轨迹和设置仿真车速。
通过取曲线若干数据点,利用作图法,如图7、图8所示。可求普通半挂汽车列车的偏移距为1295mm,随动转向半挂汽车列车的偏移距为1110mm,偏移距约减少14.3%。同理可作牵引车前桥外轮和半挂车第三轴内轮的运动轨迹,可求普通半挂汽车列车的通过宽度为3801mm,随动转向半挂汽车列车的通过宽度为3516mm,故通过宽度约减小7.5%,即随动桥减小了半挂汽车列车360°转弯所需场地,提高了半挂汽车列车的机动性。
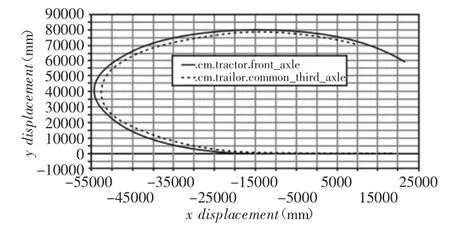
图7 普通半挂汽车列车前桥和半挂车第三轴质心轨迹Fig.7 CG Path of Front Axle and Trailer Third Axle of Common Semi-Trailer Truck
在360°转弯试验中,折叠角从第5.3s开始增加,25s左右达到稳定状态,普通半挂汽车列车的稳定折叠角为14.7°,随动转向半挂汽车列车的稳定折叠角为12.7°,折叠角约减小13.6%,如图9所示。故随动转向半挂车行驶轨迹更靠近牵引车的轨迹,其第三轴向转向内侧的侧滑较小,质心轨迹与牵引车轨迹重合度更高。
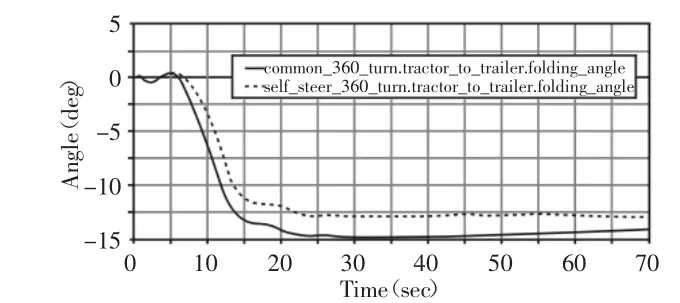
图9 360°转弯半挂汽车列车折叠角变化Fig.9 Folding Angle Change of Semi-Trailer Truck in 360°Turning
4.2 低速角阶跃转向
360°转向为定路径试验,为评价半挂汽车列车的瞬态和稳态响应特性,国内外学者常进行低速角阶跃转向运动仿真[10]。仿真设置如下:在(2~2.4)s转向盘转角从 0°阶跃至 100°,仿真时间为20s,固定转向盘至仿真结束,如图10、图11所示。
由图10和图11可知,随动转向半挂车第三轴质心与牵引车牵引座中心轨迹偏差最大值为814 mm,普通半挂车第三轴质心与第五轮中心轨迹偏差最大值为984 mm,轨迹偏差最大值约减小17.3%,故安装随动转向桥后,半挂车第三轴的跟随性能得到明显改善。安装随动桥后半挂车的横摆角速度稳定值较小,表明随动转向半挂车的稳定转弯半径大,如图12所示。半挂车向转向内侧偏移量较小,随动桥质心的轨迹更接近牵引座中心轨迹。
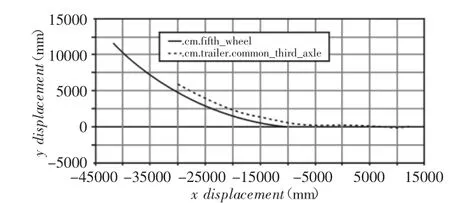
图10 角阶跃转向普通半挂汽车列车跟随轨迹Fig.10 Path-Following of Common Semi-Trailer Truck in Step Turning Test

图11 角阶跃转向随动转向半挂汽车列车跟随轨迹Fig.11 Path-Following of Self-Steering Semi-Trailer Truck in Step Turning Test
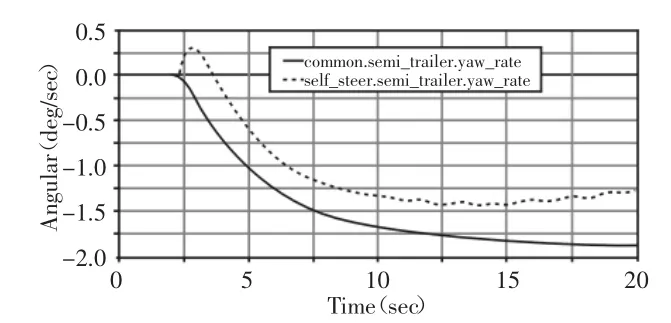
图12 普通半挂车和随动转向半挂车的横摆角速度响应Fig.12 The Yaw Rate of Common Semi-Trailer and Self-Steering Semi-Trailer
在角阶跃转向开始时,随动桥的运动轨迹相对零线略向外偏移,偏移量最大值约为40 mm,如图13所示。偏移量较小,不会对整车的机动性造成过多影响,随动转向半挂汽车列车会逐渐进入等速圆周行驶。

图13 随动桥初始轨迹偏移局部放大图Fig.13 The Local Image of Trajectory Outward of Self-Steering Axle
5 结论
利用Adams/Car模块分别建立了普通半挂汽车列车和随动转向半挂汽车列车整车模型,选取半挂车第三轴质心和牵引座中心作为轨迹跟随目标,转向仿真试验表明:(1)在360°定路径转向运动中,安装随动桥后,半挂汽车列车的偏移距、通过宽度和折叠角分别减小了14.3%,7.5%和13.6%,即随动桥减小了半挂车向牵引车转向内侧的偏移量,减轻了轮胎侧滑引起的非正常磨损,同时减小了半挂汽车列车转弯所需场地尺寸。(2)角阶跃转向试验中,当牵引车前桥转向时,随动桥车轮在地面反作用力的激励下实现转向运动,随动转向半挂汽车列车轨迹偏差值最大值约减小17.3%,故随动桥可显著提高了半挂车第三轴的跟随性能。虽然随动桥在初始转向时刻有向外运动的趋势,但其轨迹偏移量较小。
[1]韩厚禄.三轴半挂车转向协调性及随动转向桥结构原理研究[D].武汉:武汉理工大学,2009:1-2.(Han Hou-lv.Research on the turning traits of three-axles semi-trailer and the structure principle of self-steering axle[D].Wuhan:Wuhan University of Technology,2009:1-2.)
[2]韦超毅,李贝,谢美芝.半挂汽车列车操纵稳定性仿真研究[J].机械设计与制造,2011(10):129-131.(Wei Chao-yi,Li Bei,Xie Mei-zhi.Simulation research on handling stability of tractor-semitrailer[J].Machinery Design&Manufacture,2011(10):129-131.)
[3]钱晓东,孙荣军,沈国华.13.7m客车几种随动桥转向结构初探[J].客车技术与研究,2006(5):23-24.(Qian Xiao-dong,Sun Rong-jun,Shen Guo-hua.Research on several steering structure of 13.7m bus self-steering axle[J].Bus Technology and Research,2006(5):23-24.)
[4]Sina A M.Modeling,Simulation and active control of tractor semi-trailer combinations[D].Turkey Ankara:Middle East Technical University,2015:11-13.
[5]李玉宝.随动转向轴在多轴半挂车上的应用[J].专用车辆,2005(3):35-36.(Li Yu-bao.Application of self-steering axle in multi-axis trailer[J].Special Vehicle,2005(3):35-36.)
[6]季慎卿.三轴单机客车随动转向桥的关键技术.城市公共交通[J].2012(2):31-33.(Ji Shen-qing.The key technologies of triple-axles single passenger car with self-steering axle[J].Urban Public Transportation,2012(2):31-33.)
[7]巩建坡.多轴车辆全轮转向仿真分析与实验验证[D].山东:山东理工大学,2012:51-52.(Gong Jian-po.Simulation analysis and experiment verification of full wheel steering for multi-axis vehicle[D].Shandong:Shandong University of Science,2012:51-52.)
[8]许言,刘宏飞,任有.半挂汽车列车弯路行驶轨迹分析[J].长春理工大学学报,2008,31(1):132-134(Xu Yan,Liu Hong-fei,Ren You.Analysis on the trajectory of the tractorsemitrailer in crook circumstance[J].Journal of Changchun University of Science and Technology,2008,31(1):132-134.
[9]Islam M M.Design synthesis of articulated heavy vehicles with active trailer steering systems[D].Canada:University of Ontario Institute of Technology,2010:62-65.
[10]王树凤,郝秀成,柴山.五轴转向重型汽车转向性能的研究[J].汽车工程,2008,30(2):167-169.(Wang Shu-feng,Hao Xiu-cheng,Chai Shan.A study on steering performance of five-axle heavy-duty vehicle[J].Automotive Engineering,2008,30(2):167-169.)
猜你喜欢
汽车零部件(2022年3期)2022-03-29
汽车工程(2021年5期)2021-06-09
装备制造技术(2020年3期)2020-12-25
汽车实用技术(2019年16期)2019-09-11
天津教育·下(2018年9期)2018-07-13
自动化仪表(2017年8期)2017-08-30
中国设备工程(2017年23期)2017-01-20
汽车实用技术(2015年8期)2015-12-26
汽车维护与修理(2015年10期)2015-12-12
探测与控制学报(2012年1期)2012-08-27
