泉州市洛阳江古桥区域数字地形图测绘及质量评价
2018-03-15 03:29吴贵明杨文竞
城市勘测 2018年1期
吴贵明,杨文竞
(泉州市规划勘测研究院,福建 泉州 362000)
1 引 言
随着GPS-RKT(实时动态定位系统)技术的日益成熟,RTK以其高精度、高效率、易操作的特点广泛应用于各种测量和放样。使用GPS-RTK技术进行水下地形测量相当方便、快捷。水下地形测量主要包括定位和测深两大部分。对于一些不具备全站仪、RTK测设的地方,利用无人机进行地形测绘。
2 主要技术工作原理
2.1 GPS-RTK技术
RTK技术中应用的是载波相位动态实时差分技术,可以实现实时厘米级定位,是GPS定位技术新的发展与进步。随着GPS-RTK技术的不断发展,其在工程测量、测图工程、地籍测量等领域的应用越发广泛,引发了测量技术的革命。
RTK在作业过程中,基准站主要负责获得观测值、测站信息及各种数据,并通过数据链,将数据传输给流动站,通过流动站对差分观测值进行实时处理,并计算出定位结果,其定位精度达到厘米级。GPS-RTK技术的应用,极大降低了操作强度,减少了测量作业人员数量,并可以在不具备通视条件的环境下作业,其测量精度较高,应用优势十分明显。
2.2 水下地形测量原理
水下地形测量包括两部分:定位和水深测量目前的水下地形测量的主流技术定位采用的是GPS差分定位模式,水深测量采用的是回声测深仪的方法。这样就可以确定水底点的高程:
Gi=H-(D+△D)
(1)
式中,Gi为水底点高程,H为水面高程,D为测量水深,△D为换能器的静吃水。
在观测条件比较好的情况下,考虑RTK具备比较高的高程确定精度,同时严格考虑船姿的影响,无验潮模式下的水底点高程可通过下式确定:
Gi=H-D-h-△a
(2)
式中,H为GPS相位中心的高程(通过RTK直接确定),h为GPS接收机天线相位中心距换能器面的垂距,△a为姿态引起的深度改正。
2.3 无人机生成DOM原理
利用无人机生产影像图数据获取周期较短,对天气依赖性不强,可较灵活的获取高分辨率影像数据。
通过航线设计、影像控制测量、外业航飞获得图像、POS数据和控制点数据,通过影像预处理、空三加密,其中空三加密主要包括内定向、相对定向、绝对定向、区域网平差计算。根据空三加密的成果,创建立体模型,通过核线重采样制作核线影像生成DSM,进行房屋过滤生成DEM。最后利用DEM对影像进行纠正,进行一系列处理,得到DOM。
3 在水下测量中的应用
3.1 项目概况
(1)测区概况
为了更好地落实开展泉州市洛阳江古桥保护规划工作,需对洛阳古桥所属周边地区,上下游红树林自然保护区和洛阳江河道部分进行 1∶2 000和1∶5 000比例尺的水下地形测量,测区位置范围略图如图2所示。测区洛阳江洛阳古桥位于福建省泉州市,又称为万安桥,处于泉州鲤城区与惠安县交界处,横跨洛阳江的入海口。测区位置(地理坐标大致位置为:北纬24°55′50″、东经118°41′00″),沿江目前已建有 6 000多亩的省级红树林自然保护区、湿地自然保护区。测区内淤泥滩较多,小型的水道星罗棋布,养殖带较多,潮差较小,河道中有大量的渔船行驶,给水下测绘带来较大的不便。

图2 测区位置范围略图
(2)仪器设备配备
本项目投入工程测量船一台,发动机功率48匹,航速 4.5 km,主要用于单波束水深测量;投入无人机、RTK、声速剖面仪、数字回声测深仪、海测软件、绘图软件、数据检查软件、测量船等软硬件设备。
3.2 项目实施
(1)控制测量
福建省连续运行卫星定位服务系统(FJCORS),覆盖本测区,考虑到FJCORS的精度能满足本项目平面控制的基本要求,平面定位的数据直接采用FJCORS差分数据,作业期间提供了实时定位和事后精密定位等服务。同时,为保证网络RTK获取测点点位的准确性,首先利用测区附近泉州市C级GPS点Q028、Q030、Q032、620P进行RTK检核,每天测量前应进行检核测量,与已知成果进行比较,检核精度在误差允许范围内,方可进行测量。每天测量完毕后,再次对已知点进行检核,以保证测量成果的正确性。
(2)水深测量
为了确保测深仪参数输入准确无误,测区外业数据采集采用投影中央子午线为120°的CGCS2000坐标,水下地形测量采用RTK三维水深方式、单波束回声测深仪等现代测绘技术手段。测量区域水下地形时,当船通过定位技术导航进入指定测区计划测线上时,通过测深仪测量该点水深,坐标定位和测深同步记录并以相应的数据格式保存,最后输出数据。水下地形点的大地高经福建省似大地水准面精化模型改正转换成1985国家高程基准,并采用专业软件进行数据处理、成图。
①主测深线布设
充分考虑测区甲方需求,按规范的要求布置测线。主测深线方向与水下等高线垂直,大部分测线为东西走向。检查线的方向依照实际情况尽量与主测深线垂直,分布均匀,并布设在较平坦处,能普遍检查主测深线。检查线总长大于主测深线总长的5%。
②仪器安装
测深作业时,将测深仪输出接口、GPS定位输出接口同时与计算机连接,实现定位、测深同步。考虑到测深过程中,船速的快慢会影响到吃水深浅的变化,根据以往经验,测深仪换能器安装在船舶中舷处,所受影响最小,因此测深仪换能器安装在船舶中舷处。
③声速采集
水下地形测量开始前,用Valeport minisvp声速剖面仪测量测区水中的声速,将测得的声速值输入到测深仪中用于测量水深。
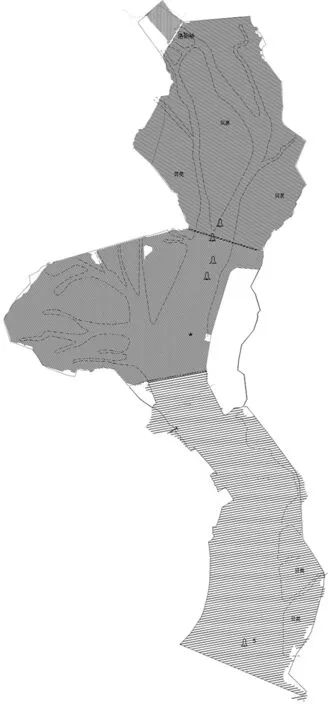
图3 设计线布设图(黑色为主测线、红色为检查线)
④动、静吃水改正
动态吃水:本次水深测量采用GPS-RTK方法,GPS天线安装在测深仪探头上方,即GPS天线与测深仪探头固定在一起,船舶行驶过程中的动态吃水对测深仪所采集数据的影响也通过实时潮位数据来抵消,因此,本次水深测量的动态吃水不需另外单独改正。
静态吃水:由于本次固定RTK采用长度为 2 m的钢管,RTK测量中心到海底水深测量点的距离是一定的(为水深值加 2 m)。故本次静态吃水的量取对测深点的高程值没有影响。
⑤水深测量数据采集
本次作业水深数据采集使用中海达HD-380全数字双频测深仪(1套)一体机进行数据采集,采集数据自动存储至计算机内,结合中海达水深后处理软件进行数据处理。
测量船根据电脑屏幕上实时显示实线的测量计划线进行跑位,测量软件进行实时定位和测深采集,并根据软件的偏航显示数据,随时修正测船的航向,使测船始终沿着设计测线方向航行;船只在测线航行时,航向变化不大于5°/min。遇到特殊情况停船,转向或变速时,应及时定位;每天对测深仪进行时间校准,使测深仪时间标记和定位时间保持同步。

图4 水深测量航迹图
(3)潮间带地形测量
陆地和海岛周边潮间带区域利用了1∶500泉州市航测数字化地形图、1∶5 000数字线划图的成果结合LiDAR高程点数据。水深测量和 1∶500地形图、LiDAR高程点数据均有必要的重叠区域,由水深测量获得的高程与 1∶500地形图、LiDAR高程点数据获得的高程互差绝对值应不大于 0.3 m。重叠区域使用本次实测数据,未实测的区域采用该区域的 1∶500地形图数据,无以上数据的区域采用LiDAR高程点数据。
(4)水下地形数字成图
外业数据采集完成后,立即投入内业编辑与处理工作,内业编辑与处理使用CASS9.1成图软件,并处理成图。
①声速改正
测深仪测深前输入的声速剖面仪法计算获得的声速固定值。虽然声速在水下的传播速度是随着深度的增加而增大,测区整体上以浅水区为主,最深的水深为 12.63 m,水深均在 20 m以内,故本项目数据后处理不做声速改正。
②水深数据处理
由参加测量的外业人员对所测的外业资料进行全面检查、校核,对海测软件所采集的水深数据与电子测深图谱上的打印值逐一进行校核,剔除跳点数据;对计算机采集的GPS定位数据逐一检查,去除非固定解值,并校核无误后进行测点高程计算。对水下地形测量中漏测地形特征点根据回声记录波形图上记录显示,在原始每秒数据中摘取。
③水下地形图的绘制
水下地形图的水下部分使用实测检查后无误的水下高程点,利用CASS9.1构建三角网,生成水下等高线,对生成不合理的等高线进行编辑修改,最终编绘成图。
由于CASS软件未提供水下等高线的绘制,为了与陆地等高线区别,项目中将 0 m以下的水下等高线分别归到水下等高线首曲线、水下等高线计曲线图层,颜色为青色。

图5 CASS9.1勾绘水下等高线效果图
④水下地形图的坐标转换
利用CASS9.1自带的坐标转换功能,导入四个已知点数据,直接将整张图先转到中央子午线120°的1954年北京坐标系,再通过换带计算把图转到泉州地方坐标系。
4 质量控制
4.1 质量保证体系
为有效完成各项任务,加强各分项目之间的工作协调能力,我院作为任务承担单位由单位主管领导指挥,组成海洋测绘项目组,以ISO 9001∶2008标准要求,对整个工程实施过程进行全程控制和监督。
4.2 质量保证措施
项目中,遵循先设计后生产的原则,实行两级检查一级验收的制度。
在作业过程中,项目外业负责人利用中海达的后处理软件对小组核查编辑后的水深数据进行抽检。
外业数据采集结束后,项目组组织专门质检人员对RTK比对记录、实测高程点范围是否符合要求,潮间带与水下测量是否有重叠、检测线是否按设计(采用主、检测线和潮间带与水下测量重叠部高程比对)等进行了内业资料的完整性、成果数据图件正确性检查,并及时将检查意见反馈于作业组,及时进行整改。本次检查线与主测线长度之比为8.8,符合规范要求。
统计主测线与检查线交叉点的高程比对,并计算点位高程中误差。中误差公式采用下式计算:
主、检测线不符值限差规定:水深0 m~20 m时:小于 0.4 m;超限的点数不得超过参加比对总点数的20%。

高程检测统计表 表2
满足项目设计要求,质量合格。
项目完成后,由项目组所在科室进行院一级检查,检查合格后由院质检科进行二级检查,检查合格后提交省质监站验收。
5 技术问题处理
5.1 红树林边界线问题
洛阳江古桥测区附近红树林具有密度大、分布无规律等特点,且实地有专人看护,不允许测船进入,又不具备全站仪、RTK确定林地边界的条件,因此项目中利用了无人机获取高分辨率影像图来确定其范围线。
5.2 关于养殖带和养殖的水塘的绘制
测区养殖的种类复杂,海蛎桩的范围结合水下地形测量中的部分定位点粗略绘制。虾塘蟹塘等养殖的水塘依据无人机获取高分辨率影像图确定其范围线和大小,再依据外业调查确定其养殖种类。
6 结 语
GPS-RTK以其高精度、高效率、易操作的特点广泛应用于水下地形测量,大大提高了水下地形测量的效率和准确性。本项目中利用GPS-RTK和无人机测绘技术的有效结合,解决了不易获取GPS信号测区的测绘。在复杂地形的水下地形测量时,尤其是对于不方便设站、测区内淤泥滩、养殖带较多的水域,利用GPS-RTK和无人机的有效结合可以更方便精确地进行测量,提高测量的精确性,提高测绘效率。利用不同技术的结合使用将是以后测量技术发展的一个新方向。
[1] 周忠谟. GPS卫星测量原理与应用[M]. 测绘出版社,1992.
[2] 付青松. 应用GPS RTK技术的城市工程测量方法研究[J]. 测绘与空间地理信息,2011(1):75~77.
[3] 梁开龙. 水下地形测量[J]. 测绘通报,2001(6):16~16.
[4] 李俊,黄永. GPS RTK技术在水下地形测量中的应用[J]. 水电能源科学,2008(1):88~89.
[5] 孙杰,林宗坚,崔红霞. 无人机低空遥感监测系统[J]. 遥感信息,2003(1):49~50.
[6] 赵翔. 基于无人机航摄DOM生成技术的研究与应用[D]. 南昌:东华理工大学,2015.
猜你喜欢
河北水利(2022年10期)2022-12-29
海洋通报(2022年4期)2022-10-10
山东煤炭科技(2022年6期)2022-07-14
海洋信息技术与应用(2022年1期)2022-06-05
河北地质(2021年4期)2021-03-08
中国铁道科学(2019年5期)2019-10-19
广东教学报·教育综合(2019年87期)2019-09-10
测绘通报(2019年1期)2019-02-15
测绘通报(2018年10期)2018-11-02
地理教育(2016年10期)2016-11-09