
基于质点-弹簧的肝脏虚拟手术力反馈研究
2018-03-30 08:24郭忠峰
现代制造技术与装备 2018年2期
郭忠峰 邵 岩
虚拟手术仿真是虚拟现实技术的重要应用之一。虚拟手术主要用来对真实的临床手术进行术前规划、术中模拟、术后总结以及对新晋医生的培训等。
近年来,虚拟手术系统得到人们越来越多的关注和研究,产生了很多令人瞩目的应用。20世纪80年代末,Delp和Rosen设计的用于观察关节移植手术进行过程和结果的虚拟外科手术系统,是人们对于虚拟手术系统的第一次尝试[1]。90年代,Satava建立了可在系统中使用虚拟的手术器械进行手术仿真的第一个腹部手术仿真系统,可以通过在组织周围漫游来观察组织[2]。之后,Merrill构造了一个关于人体躯干的CT图像,可以用于一些人体器官物理性质的模拟[3]。1995年,Levy把简单的力反馈设备加入虚拟手术系统中,这是第一次进行真正意义上的虚拟外科手术[4]。国外许多高校和科研机构关于虚拟手术仿真的研究成果显著,在虚拟仿真领域处于领先地位。例如,Immersion Medical公司开发的CathSim血管内导管插入仿真系统,通过专用的力反馈接口可以模拟病人的注射特征[5]。加利福尼亚大学在改装的PATHTOM力反馈设备上,研发了一个叫VESTA的腹腔镜手术的仿真系统,当时被用作外科医生的训练和评估系统。此外,Wesber以及Naoki Kusamoto等人也建立了具有针对性的虚拟手术仿真系统[6]。国内方面,谭柯等人在之前设备的基础上添加了触觉感知通道,对鼻腔镜手术进行了模拟,采用质点-弹簧模型计算软组织模型的面弹力,但其形变模型采用的是有限元模型[7]。2006年,许天春等人使用THANTOM设备设计了一个声带肿物切除仿真系统[8]。为了保证计算效率,构建模型的质点数量较少,因此模型表面的三角网格较大,仿真精度较差。2008年,叶秀芬等人采用质点-弹簧面模型对人体软组织形变技术进行研究,实现了力反馈[9]。
1 人体软组织模型
1 质点-弹簧模型
质点-弹簧模型可以理解为若干个弹簧和阻尼器并联之后将空间中各个质点进行有效的连接来表现人体中软组织器官的一种模型。质点-弹簧模型根据质点分布规律可分为面模型和体模型。
面模型的网格密度(即三角面片的大小)可以根据实验的需求自主进行划分,因为面模型只是以软组织表面为形变和计算面,其内部无网格和其他结构,所以,其计算效率高,实验的实时性可以得到保证。
体模型是对具有一定体积和内部结构的三维实体组织进行建模,能够同时表现其表面和内部的结构和形变特征。在建模中常用的拓扑结构有四面体、六面体、超六面体三种。超六面体模型的性质和结构分布还在进一步研究中,目前尚不完善。六面体模型结构简单,质点分布均匀,比较适合质量均匀、形状规则的模型,但是其计算精度较低,稳定性较低。四面体模型与人体软组织几何模型基本一致,相同体积下,弹簧数量比六面体模型多40%~50%,具有良好的稳定性和计算精度,能较好地描述软组织的物理特性。因此,本文选取四面体建模来构建肝脏模型。
1.2 Tetgen四面体建模
在三维建模中有多种划分基础图元的方式,其中,三角形图元是最简单也是最基础的图元,任何面状图形都可以分割为多个三角形的形式进行表达。四面体作为体的基础单元,它是由最少数量的三角形图元建立起来的,任何体都可分割为多个四面体进行表达。因此,三角剖分在三维建模中具有重要的作用,广泛应用于几何造型、仿真、虚拟现实、医学等领域。四面体剖分已被有限元分析、计算机图形学、科学计算可视化、生物医学和地理信息系统等领域广泛使用。
ThtGen为德国计算数学与科学计算应用分析和随机指数维尔斯特拉斯研究所(WIAS)Hang Si编写,如图1所示。其可使用在所有主流的操作系统上,如Unix/Linux,Mos,Windows等。TetGen可以认为是美国加州大学克利分校计算机科学部Jonatan Richard Shewchuk编写的Triangle二维网格生成和三角剖分软件在三维基础上的结合和更深层次的推广。TetGen内部配备了非常丰富的指令来满足多领域、多场景的使用,在品类繁杂的四面体剖分软件中来说,面对初学者和一般用户都是相当友好的。
1.3 动力学方程
四面体网格拓扑结构如图2所示。假设整个软组织模型由n个质点构成,在软组织形变任意时刻,模型的状态是由其中的每个质点的位置xi,速度vi确定的。任意质点t满足以下动力学方程:

式中,mi是质点i的质量;xi是质点i的位置矢量;表示与质点i相连的所有弹簧施加于质点i的内力;fiex表示质点i所受的外力,包括摩擦力、重力和用户施加的力等。
一般力反馈建模中通常采用单一的线性弹簧建模来表示质点间的相互作用,但由于正常的软组织并非严格按照线性弹簧的规律变化,考虑涉及软组织粘弹性的问题,本文采用粘弹性弹簧模型,该模型使用了线性弹簧和阻尼器并联的Voigt方法。上式中的内力就分别由弹簧提供的弹性力和阻尼器提供的阻尼力两部分来组成,其在式(2)中分别表示为fs和fd。

图1 Tetgen网格效果图
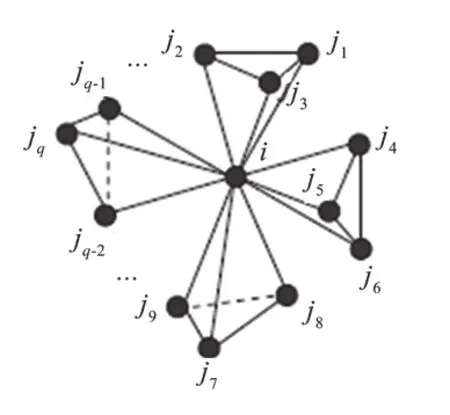
图2 四面体网格拓扑结构
将上式整理并带入动力学方程可得:

式中,|xj-xi|为两个质点之间位置矢量之差;|xj-xi|0为发生形变前弹簧的原长;ks为弹簧的弹性系数;kd为弹簧的阻尼系数。
1.4 物理建模
利用专业医学建模软件mimics,将人体软组织的CT图像通过精准的阈值选取和特征提取,来获得三维模型。mimics输出的模型格式是stl格式。stl文件是在计算机图形应用系统中,用于表示三角形网格的一种文件格式。stl文件表示的是一个封闭的面或体,但由于本次实验所需要的是肝脏组织,stl文件不足以满足本次实验的需求,所以,采用tetgen四面体分割算法将所生成的stl文件进行重新的四面体划分,生成ele文件。ele文件保存了四面体列表,每个四面体有四个角点(如果使用了“-o2”命令将有10个角点),记录了对应与node文件的顶点索引号(node文件也是tetgen的一种输出文件,其中包含了四面体的所有顶点及其相对应的索引号)。如果开启了“-o2”命令,那么余下的六个节点为四面体边界的中间点,也就是四面体六条边的中点。四面体角点与节点如图3所示。
分别根据ele文件提供的点集设定质点骨骼球,再在每个四面体的边上设立弹簧和阻尼,建立质点-弹簧模型和节点模型。
2 算法介绍
2.1 碰撞检测算法
碰撞检测也被称为接触检测,首先,它是基于现实生活中一个非常普遍的事实,那就是,不可穿透的两个物体是不可能共享同一片空间区域的,也就是说,两个不可形变、不可穿透的物体,如果想要共享一片区域,那么必然要在这之前先发生碰撞。对于虚拟手术而言,碰撞检测是其中非常关键的一部分,也是虚拟手术中力觉反馈的基础。碰撞检测主要任务是根据场景与模型、模型与模型之间的位置信息及位移情况来判断它们之间是否有碰撞发生,若发生碰撞,则将碰撞信号立刻上传到系统,系统判断运动是否停止以及开始计算接触力,若没有碰撞发生,则模型继续原先运动,直到发生碰撞或主动停止运动。一般的碰撞检测大致分为两个阶段:初步检测阶段和逐步求精阶段。它们的关系是初步检测进行最外层包围盒的相交检测,如果发生相交,则遍历层次树寻找可能相交的点,再进行精确求交,大致过程如图4所示。

图3 四面体角点与节点

图4 碰撞检测流程
2.2 反馈力算法
本文采用质点-弹簧阻尼力反馈计算模型,该模型采用“代理”算法来计算反馈力,具体过程如图5所示。
图5说明了虚拟代理的运动,因为触觉设备的位置被改变。代理点试图始终朝着一个目标前进。代理点无阻碍地直接向目标移动。当代理点遇到障碍物时,直接运动是不可能的,但代理仍然可以通过沿着一个或多个约束表面移动来减少到目标的距离。选择该动作以在局部最小化到目标的距离。当代理点无法减少与目标的距离时,它将停止在该位置。人们可以通过在触觉设备的位置和代理之间对虚拟弹簧建模来计算弹簧力。而阻尼力则通过位移的速度来进行相应的求解。

图5 代理算法示意图
3 虚拟手术模拟仿真及结果分析
本实验选取100顶点、300顶点、500顶点分别进行建模仿真,如表1所示。

表1 虚拟手术建模仿真
由实验可知,当选取100个顶点进行仿真时,虽然视觉和触觉刷新频率满足实验结果需求,但图形精度较差,难以完全体现肝脏的模型性质;选取500个顶点时,虽然图形表达较为完整,但是视觉和触觉刷新频率不能满足实验需求。所以,选择300顶点进行模拟,这样既能满足图形仿真精度,又能满足实验需求的视觉和触觉刷新频率,300顶点仿真结果如图6所示,其模拟效果图如图7所示。

图6 300顶点的肝脏仿真图像

图7 模拟效果图
使用了300顶点的四面体建模实现的力反馈仿真,可以成功地将力刷新频率控制在1000Hz以上,视觉刷新频率稳定在65Hz以上,能很好地模拟触觉模拟和视觉模拟。
4 结论
本文采用了基于质点-弹簧和四面体建模的方式进行肝脏的模拟仿真,选择以数量为300的顶点进行模拟仿真,能较好地模拟肝脏的生物学特性,此次仿真具有较强的真实性。实验数据表明,此方法具有很高的计算效率和较好的实时性,实验过程中视觉刷新频率稳定维持在65Hz以上,触觉刷新频率稳定维持在1000Hz以上,有效地保证了实验的真实性和实时性。同时,该方法可以全面地表现肝脏的特性,进而保证实验的仿真精度。所以,此次基于质点-弹簧和四面体建模的仿真实验具有重要的意义。
[1]嵇武,李宁,黎介寿.达芬奇手术机器人的应用进展[J].东南国防医药,2010,12(5):427-430.
[2]赵志球.多自由度微创手术机械从手的设计与研究[D].上海:上海交通大学,2010:1-7.
[3]董斌.基于CT图像的虚拟手术软组织建模方法研究[D].保定:河北大学,2012:2-9.
[4]于德海.虚拟手术系统中力反馈技术的设计与实现[D].济南:山东大学,2013:1-10.
[5]付志宇.力触觉反馈系统的虚拟现实应用研究[D].上海:上海工程技术大学,2015:1-9.
[6]许天春.面向支撑喉镜手术的虚拟仿真系统研究[D].天津:天津大学,2006:2-8.
[7]杜宽森.基于触觉反馈的心脏微创手术机器人技术研究[D].郑州:河南工业大学,2013:1-5.
[8]Jonathan D French,James H Mutti,Satish S Nair,etal.High Performance Force Feedback Mechanism for Virtual Reality Training of Endotracheal Intubation[J].ISA Transactions,2004,43(1):85.
[9]Lan T S,Her M G,Hsu K S.Virtual Reality Application for Direct-Drive Robot with Force Feedback[J].International Journal of Advanced Manufacturing Technology,2003,21(1):66-71.
猜你喜欢
赣南师范大学学报(2022年6期)2022-12-12
东北大学学报(社会科学版)(2022年1期)2022-02-17
中学生数理化(高中版.高考理化)(2021年9期)2021-11-05
海外星云(2021年6期)2021-10-14
数学物理学报(2021年4期)2021-08-30
数学物理学报(2021年2期)2021-06-09
特别健康(2018年3期)2018-07-04
北方音乐(2017年4期)2017-05-04
试题与研究·高考理综物理(2016年3期)2017-03-28
试题与研究·高考理综物理(2016年3期)2017-03-28
