
考虑布儒斯特角约束的超低空机动目标拦截
2018-03-31 01:37何广军何阳光熊思宇
弹道学报 2018年1期
陈 峰,何广军,何阳光,熊思宇
(空军工程大学 防空反导学院,陕西 西安 710051)
在目标处于低空、超低空飞行情况下,由于受到地海杂波及多径效应的影响,雷达导引头在跟踪探测目标时性能大大下降[1]。提高防空导弹的超低空拦截性能一直是防空领域的一个难题。对超低空拦截精度影响最大的是多径效应,这种效应会导致雷达导引头无法有效跟踪辨识真实目标与镜像虚假目标,造成角跟踪误差,引起脱靶[1-2]。目前,国内外大量研究表明,对抗多径,抑制杂波的根本途径是变被动处理为主动抑制。其主要有2个技术突破口:一是宽带探测信号,寻找最佳的信号带宽,使导引头的信杂比最优[3];二是设计布儒斯特弹道,寻找一个最佳的弹目视线角,也就是布儒斯特角,来有效避免多径效应[4],使导引头受到的多径干扰最小,从而准确跟踪拦截超低空目标。文献[5-7]对末端攻击角度进行了深入研究,但是其只能在攻击末端时刻将落角约束至期望的角度,而超低空拦截为了降低多径干扰的影响,需将弹目视线角尽快约束至布儒斯特角附近。
本文在文献[8-10]滑模变结构制导律思想的基础上,设计出一种自适应变结构末制导律,通过调整变结构参数,加快弹目视线角收敛至布儒斯特角的速率,同时将角速率收敛至0,使多径干扰降到最小。针对超低空目标机动加速度难以准确测量和估计的问题,采用小角度线性化的方法对所设计的制导律进行改进,结果表明,改进后的制导律仍具有理想的超低空拦截性能,且其数学形式简单,在工程实践上更具有可行性。
1 布儒斯特效应与超低空拦截
1.1 布儒斯特效应
布儒斯特效应在电磁学中定义为垂直极化波镜面反射系数最小时的入射角;而在防空导弹雷达导引头中定义为雷达导引头超低空下视探测环境时,多径干扰强度最小的波束照射角。
多径干扰来源于地面、海面与低空目标间的电磁耦合作用,因受到目标与地面、海面的双重调制,而具有类目标特性,如图1所示。

图1 多径干扰示意图
防空导弹雷达导引头下视探测超低空目标时,目标越低,与地面或海面的耦合越强,多径干扰也越强。多径的存在会导致雷达导引头无法有效辨识真实目标与镜像虚假目标,造成跟踪错误,或跟踪真实目标与镜像目标的合成相位中心,造成角跟踪误差,引起脱靶。因此,研究超低空拦截问题必须从避免多径干扰方面突破。防空导弹在拦截超低空目标时,根据地面、海面环境反射系数随角度的变化规律,存在一个环境反射最小的角度,称为布儒斯特角,如果导弹按布儒斯特角探测拦截目标,可有效降低多径干扰的影响。同时,不同环境的布儒斯特角也是不同的,海洋环境在10°左右,沙漠环境在30°左右[3]。
1.2 超低空拦截模型


图2 超低空拦截模型
导弹与目标相对运动方程:
(1)

(2)

(3)

(4)

2 自适应变结构制导律
2.1 自适应变结构制导律设计
在目标超低空飞行情况下,导弹在终端攻击目标时,视线角需稳定在期望的布儒斯特角附近,同时也要满足视线角速率收敛至0,降低脱靶量的要求。即
(5)
式中:qd(tf)为期望的视线角,tf代表拦截弹击中目标的时刻。
因此可选取双滑模面:
S1=x1=q(t)-qd(tf)
(6)
(7)
根据所取状态变量和导弹拦截目标的相对运动方程,可得状态方程:
(8)

S=x2+λvmx1/R
(9)
式中:系数λ为正的常数,当S=0时,系统的状态是沿滑模面运动。此时,系统状态的转移不再受系统中参数变化和外部扰动的影响,具有较强的鲁棒性;当x1=x2=0时,导弹可以按照所设计的期望布儒斯特角探测拦截目标。
为保证系统状态能到达滑模面且在趋近滑模面运动的过程中有良好的动态特性,同时由于式(8)所示的系统为时变系统,因此可构造对时变参数具有自适应能力的趋近律,即

(10)
式中:ε,k均为大于0的常数。



(11)
对式(9)求导,并联立式(6)和式(7),可得:
(12)
由式(1)~式(4),联立式(11)和式(12),求得自适应变结构制导律:

(13)
现实中,由于滑模变结构控制存在不连续开关项,会使得滑动模态出现抖振现象。故采用高增益连续函数Θ(S)=S/(|S|+δ)代替符号函数sgnS,以消除抖振的影响,其中δ是很小的正常数,代表着所设计的连续化函数接近sgnS的程度[11]。
这样经过光滑处理的滑模制导律为

(14)
2.2 仿真验证
1)仿真1:制导律有效性的验证。
在沙漠环境下,分别对不同机动的超低空目标进行迎面拦截仿真验证。
设目标1进行正弦爬升机动,假设其机动加速度可获得,设为at1=-40sin(0.5πt),目标2进行一种S形轨迹机动,这种机动更为复杂,其加速度为
设超低空目标1和目标2的初始飞行高度分别为Y1=Y2=30 m,初始位置分别为X1=X2=6 000 m,初始速度分别为vt1=vt2=400 m/s,机动加速度分别为at1和at2,初始弹道倾角分别为θt1=θt2=180°;拦截弹的初始水平位置Xm=0 m,高度Ym=3 000 m,初始速度vm=580 m/s,初始弹道倾角θm=-30°。参数设置为λ=10,k=2,ε=100,δ=0.01。由前面已知,沙漠环境的布儒斯特角在30°左右(这里只是表示角度的大小,按照图2标注的方向应为负值)。仿真结果见图3~图7。
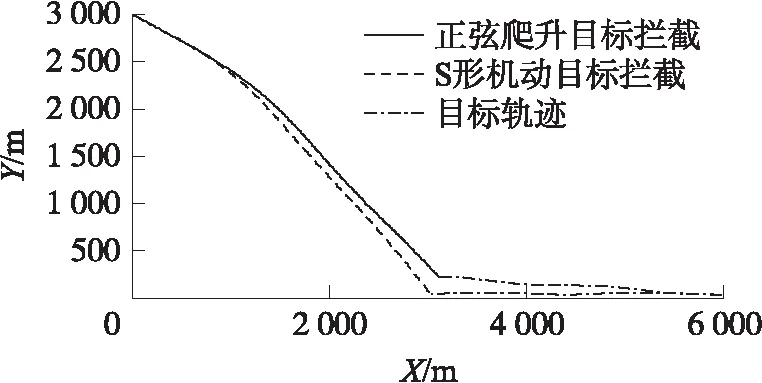
图3 拦截机动目标的布儒斯特弹道

图4 视线角响应曲线

图5 视线角速率响应曲线

图6 目标加速度变化曲线

图7 拦截弹加速度响应
对于拦截沙漠上的超低空目标,由于其布儒斯特角在30°左右,为了降低多径干扰对导引头制导精度的影响,需将视线角尽快控制至30°。超低空来袭目标进行突防时,可能会采取不同的机动加速度。由图3可以看出,改变超低空目标的机动突防方式,拦截弹最终总可以以较平直的布儒斯特弹道击中目标。根据图4和图5,针对不同的机动目标,该制导律最终总可以将视线角大小控制至30°,即沙漠环境的布儒斯特角,且视线角速率收敛至0,保证了拦截弹最终以期望的布儒斯特角攻击目标,从而降低了多径干扰的影响,提高了制导的精度。且由图6、图7可知,当目标以4g(g为重力加速度)的加速度做机动突防时,拦截弹为了将视线角快速地约束至布儒斯特角附近,导致拦截弹在1~3 s时间段里的加速度响应达到了11g,这也说明了反导比突防的要求更高,难度也更大,符合实际工程情况;但在3 s以后的时间段内,拦截弹加速度幅值迅速降到4g,和突防目标一致大小,验证了所设计制导律的有效性与鲁棒性。
2)仿真2:制导律参数ε的选取。
下面着重讨论式(14)中制导律参数ε值的选取原则,对正弦爬升机动目标进行拦截仿真验证。仿真初始条件的设置参照仿真1,这里只是改变参数ε值的大小。仿真结果如图8~图10所示。
由图8和图9可以看出,增大ε值,可以加快视线角的收敛速度,使视线角更快地约束至期望的布儒斯特角附近。但是,当ε=100时,再继续增大ε值,视线角的收敛速度基本保持不变,此时如图10所示,拦截弹的起始过载会迅速增大,这对拦截弹的性能要求很高。因此,ε=100为最佳取值,既能使视线角快速约束至布儒斯特角,同时又能保证拦截弹的起始过载只有2g。

图8 不同ε时的视线角
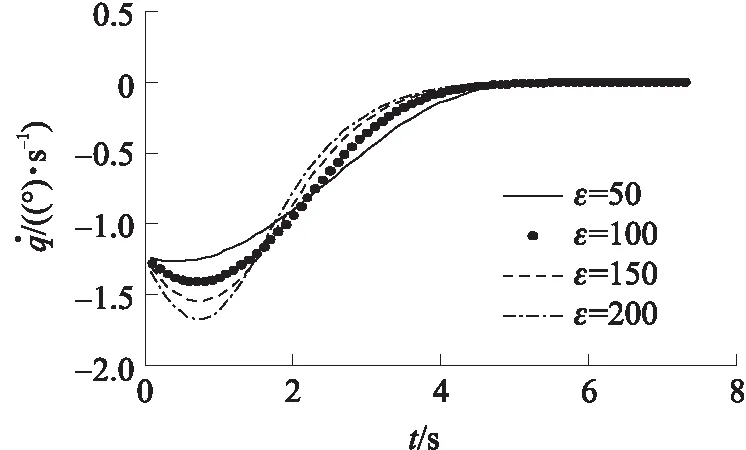
图9 不同ε时的视线角速率

图10 不同ε时的拦截弹加速度指令
参数k的选取原则可参照ε的选取原则,需折中考虑视线角的收敛速度和拦截弹的过载限制。
3 改进的制导律
在实际的拦截过程中,机动目标的加速度是无法准确获得的,需要对其进行估计。目前对目标加速度的估计大多是从滤波算法和状态观测器方面研究[12-13],但是这些都需要先建立相应的模型,有些滤波算法甚至还要求噪声是特定类型的。而超低空拦截时,多径散射信号的形成及目标-环境的复合散射模型是极其复杂的,相应的多径干扰及杂波影响也是极其复杂的。若用以上方法对目标加速度进行估计,会使得目标的加速度估计还是不准确。如果将不准确的目标加速度估计信息反馈到制导指令中,则会大大降低超低空目标的拦截精度,甚至可能导致脱靶。因此,本文在所设计的制导律的基础上以一种小角度线性化的方法对其进行改进。

sinq1=Y1/R
(15)
式中:R为弹目相对距离,由于q1是个无穷小量,则式(15)可简化为
q1=Y1/R
(16)
对式(16)求一阶导数,可得:
(17)
式(17)可改写成:
(18)
对式(17)求导,并联立式(18),最终得到:

(19)

(20)
将式(20)代入式(19),得到:
(21)
切换函数取式(9),趋近律取式(10),依照求式(13)的方法,得到此时的制导指令:

(22)
将目标在超低空环境中的小机动加速度视为干扰项予以忽略,式(22)可写为

(23)

(24)
同样,为了消除抖振的影响,仿照式(14),得到最终的制导指令:
(25)
对比式(14)和式(25),可以看出,通过小角度线性化改进后的制导律与原变结构制导律相比,方程更加简单,变量的个数也大大减小了。无需准确知道目标的机动加速度,无须测量拦截弹的弹道倾角,无需计算三角函数,大大减少了测量计算中出现的各种误差。且无需准确知道超低空目标的机动加速度,有效避免了多径效应和杂波对目标机动加速度估计的影响,更易于工程实现。
4 算例分析
为了验证改进后制导律的有效性,将其与第2节中的自适应变结构制导律进行比较。
设超低空目标的初始飞行高度Yt=10 m,初始位置Xt=6 000 m,初始速度vt=400 m/s,目标做正弦爬升机动,加速度at=-40sin(0.5πt),初始弹道倾角θt=180°;拦截弹的初始位置Xm=0 m,高度Ym=3 000 m,初始速度vm=580 m/s,初始弹道倾角θm=-30°。参数设置为λ=10,k=2,ε=100,δ=0.01,由前面已知,沙漠环境的布儒斯特角在30°左右。仿真结果如图11~图14所示。

图11 拦截弹道对比

图12 视线角变化对比

图13 视线角速率变化对比
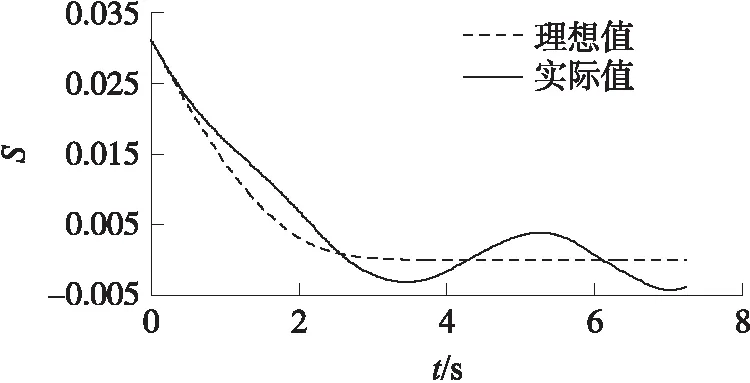
图14 滑模面曲线对比
图11中,理想拦截弹道是根据式(14)所设计的理想制导律得到的,其前提是假定超低空目标的机动加速度已知。因此图12~图14中相应的视线角变化曲线、视线角速率变化曲线和滑模面变化曲线光滑平直。而在实际的超低空拦截中,由于受到多径效应及地、海杂波的影响,目标的机动加速度是无法准确测量或估计出来的。采用小角度线性化的方法对理想的制导律进行改进,使其更符合工程实际。因此,图12~图14中相应的实际视线角变化曲线、视线角速率变化曲线和滑模面变化曲线会在理想值的附近出现一定微小范围的波动。但从图11、图12可看出,通过式(25)改进后制导律得到的实际拦截弹道并不影响超低空目标的拦截性能,仍能以近似理想的布儒斯特弹道击中目标。
5 结论
针对雷达导引头下视探测超低空目标时环境多径效应影响导致的跟踪精度下降的问题,设计出一种自适应变结构末制导律。该制导律可确保雷达导引头在探测跟踪超低空目标的过程中,将弹目视线角收敛至期望的布儒斯特角附近,从而降低多径干扰的影响。考虑实际工程应用中目标机动加速度无法准确获得的问题,采用小角度线性化的方法对理想条件下的制导律进行改进。结果表明,改进后的制导律无须事先知道目标的机动加速度,且其数学形式简单,在工程实践上更具有可行性。
[1] 束川良. 适用于通用布儒斯特角的防空导弹超低空弹道设计[J]. 地面防空武器,2008,39(3):23-26.
SHU Chuanliang. Super low altitude air defense missile trajectory suitable for general Brewster angle[J]. Land-based Air Defence Weapons,2008,39(3):23-26. (in Chinese)
[2] 王利军,郭建明,郝晶. 多径效应对雷达探测低空巡航导弹的影响[J]. 雷达科学与技术,2010,8(1):7-11.
WANG Lijun,GUO Jianming,HAO Jing. The influence of multi-path effect on low altitude cruise missile detection in radar[J]. Radar Science and Technology,2010,8(1):7-11. (in Chinese)
[3] 隋栋训,童创明,彭鹏. 超低空目标的广义布儒斯特效应[J]. 空军工程大学学报,2015,16(4):29-32.
SUI Dongxun,TONG Chuangming,PENG Peng. A study of G-Brewster of super-low altitude target[J]. Journal of Air Force Engineering University,2015,16(4):29-32. (in Chinese)
[4] 王国胜,李芸. 一种满足布鲁斯特角约束的导引律研究[J]. 现代防御技术,2014,42(3):70-74.
WANG Guosheng,LI Yun. Guidance law for restraint of Brewster angle[J]. Modern Deffence Technology,2014,42(3):70-74. (in Chinese)
[5] 李强,卢宝刚,王晓辉. 一种导弹终端侵彻多约束最优制导方法[J]. 兵工学报,2016,37(6):1 132-1 137.
LI Qiang,LU Baogang,WANG Xiaohui. A terminal multi-constraint optimal guidance law for missile[J]. Acta Armamentarii,2016,37(6):1 132-1 137. (in Chinese)
[6] 张宽桥,杨锁昌,陈鹏. 带落角约束的自适应滑模变结构导引律[J]. 现代防御技术,2016,44(3):44-51.
ZHANG Kuanqiao,YANG Suochang,CHEN Peng. Adaptive sliding mode variable structure guidance law with impact angle constraint[J]. Modern Deffence Technology,2016,44(3):44-51. (in Chinese)
[7] ZHAO Y,SHENG Y Z. Sliding mode control based guidance law with impact angle constraint[J]. Chinese Journal of Aeronautics,2014,27(1):145-152.
[8] HE S M,LIN D F. Sliding mode based impact angle guidance law considering actuator fault[J]. Optik,2015,126(20):2 318-2 323.
[9] WANG H Q,CAO D Q,WANG X D. The stochastic sliding mode variable structure guidance laws based on optimal control theory[J]. Journal of Control Theory and Applications,2013,11(1):86-91.
[10] HAN Y H,XU B. Variable structure guidance law for attacking surface maneuver targets[J]. Journal of Systems Engineering and Electronics,2008,19(2):337-341.
[11] 辛腾达,范惠林,闫琳. 滑模变结构制导律的抖振问题研究[J]. 航空兵器,2015(2):10-13.
XIN Tengda,FAN Huilin,YAN Lin. Study on chattering of sliding mode variable structure guidance law[J]. Aero Weaponry,2015(2):10-13. (in Chinese)
[12] 曹有亮,张金鹏. 扩展卡尔曼滤波器的目标机动信息估计研究[J]. 航空兵器,2016(1):40-44.
CAO Youliang,ZHANG Jinpeng. Researeh on target maneuvering information estimation method of EKF[J]. Aero Weaponry,2016(1):40-44. (in Chinese)
[13] 王华吉,简金蕾,雷虎民. 带扩张观测器的新型滑模导引律[J]. 固体火箭技术,2015,38(5):622-627.
WANG Huaji,JIAN Jinlei,LEI Humin. A new sliding mode guidance law based on extended state observer[J]. Journal of Solid Rocket Technology,2015,38(5):622-627. (in Chinese)
猜你喜欢
小哥白尼(趣味科学)(2022年3期)2022-06-09
北京航空航天大学学报(2022年5期)2022-06-06
北京航空航天大学学报(2021年4期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
数字海洋与水下攻防(2020年5期)2021-01-04
中国新技术新产品(2020年19期)2020-12-25
舰船电子工程(2019年10期)2019-11-13
弹箭与制导学报(2019年3期)2019-11-13
兵器装备工程学报(2019年10期)2019-11-08
空天防御(2019年3期)2019-08-23
