基于粒子群优化的卡尔曼滤波去耦算法
2018-04-03 03:46陆志毅李相平邹小海
系统工程与电子技术 2018年4期
陆志毅, 李相平, 陈 麒, 邹小海
(海军航空工程学院电子信息工程系, 山东 烟台 264001)
0 引 言
随着作战的电子环境日趋复杂,捷联导引头技术受到各个军事强国的重视。捷联导引头相比于传统的导引头具有可靠性高、质量轻以及弹体过载信息不敏感[1]等优势,尤其是相控阵雷达导引头。近年来,美国战略防御局、英国的Qinetiq公司以及意大利的Matra Bae Dynamics Alenia (MBDA)公司都在积极地攻克相控阵雷达导引头弹体姿态扰动和波束指向耦合的难题[2]。针对相控阵雷达导引头去耦的问题,文献[3]分析了波束角指向误差斜率的特性,并提出了基于波束角误差补偿的解耦算法;文献[4-5]根据波束指向在惯性坐标系下不变的原理,提出了通过坐标转换的关系实时保持波束稳定的算法;文献[6-10]研究了卡尔曼滤波器在相控阵雷达导引头去耦以及弹目视线角速率提取上的运用,但是在滤波过渡的过程中,由于导引头前向通道增益系数Ks和波束控制增益系数Kg刻度尺度不同带来的隔离度问题,会引起整个制导系统的不稳定,使得提取的视线角速率误差过大。
由于制导系统是一个非线性、连续的系统,在建立卡尔曼滤波方程的时候,可以根据扩展卡尔曼滤波(extended Kalman filter, EKF)采用泰勒级数展开一阶近似的方法将非线性系统线性化的基本思想[11]进行处理,然后把连续型卡尔曼滤波方程离散化即可。
本文提出了一种粒子群优化的卡尔曼滤波去耦算法,对于导弹制导回路中的非线性系统参数,采用EKF进行处理,根据状态方程和量测方程获得最小均方差意义下的最优估计[12]。同时为了减小Ks和Kg带来的影响,利用粒子群优化算法不断对Ks和Kg值进行调整,使得经过滤波后的估计值达到最优值。最后通过仿真实验对比了优化后的弹目视线角速率提取值误差和未优化的提取值误差,以及优化后算法和当前主流的波束误差补偿算法的误差值。表明了所提算法可以克服Ks和Kg带来的误差量过大问题,并且验证了算法在相控阵雷达导引头上去耦的有效性。
1 粒子群优化的EKF去耦算法原理
EKF可以根据系统每个时刻的量测值和滤波参数,通过量测方程和状态方程进行时间更新和量测更新,进而得到该系统状态的后验估计值。同时用粒子群算法修正输入的增益参数Ks和Kg,直至输出的结果满足适应度函数条件,即为最优的估计值。图1为整个去耦算法的原理框图。
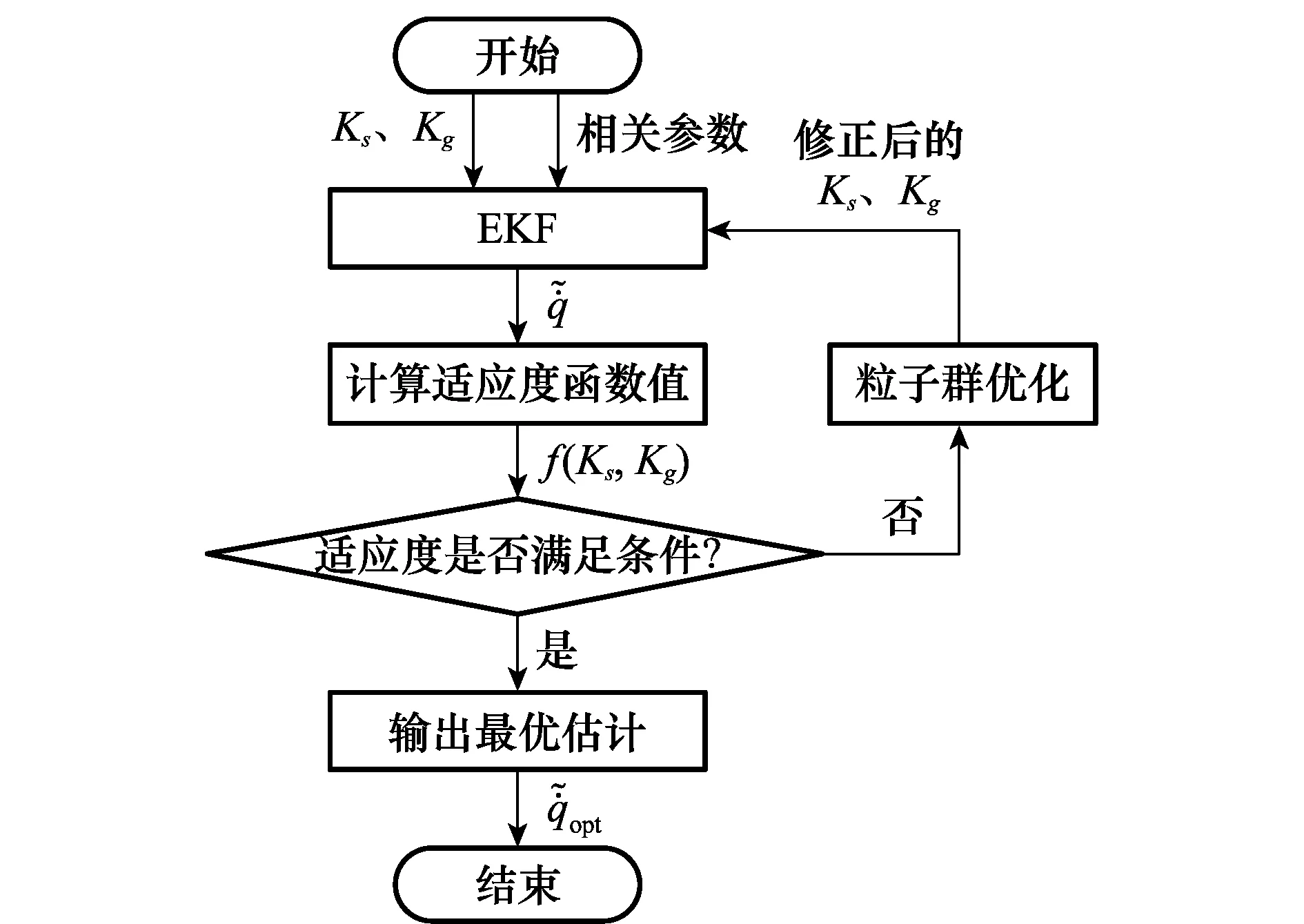
图1 粒子群优化的EKF去耦算法原理框图

2 粒子群优化EKF去耦算法的实现
2.1 粒子群优化算法
粒子群优化是由Kennedy和Eberhart基于一种社会心理学模型中的社会影响和社会学习而提出的。其仿真模型是要模拟鸟群在捕食过程中,避免碰撞,通过团体的协作,不断调整自己的飞行轨迹向最优位置靠近的行为[13]。针对问题中提到优化增益参数Ks和Kg,可以用每个粒子代表一个2维空间的候选解,选择合适的适应度函数,计算各个粒子的适应度,并按照式(1)和式(2)来不断地迭代和更新自己的速度和位置。
vij(t+1)=ωvij(t)+c1r1j[pbest-xij(t)]+
c2r2j(t)[gbest-xij(t)]
(1)
xij(t+1)=xij(t)+vij(t+1)
(2)
式中,vij和xij分别是粒子i在第j维上的速度和位置;pbest为粒子i遍历后在空间搜索的个体最优位置;gbest是所有粒子目前为止搜索到的全局最优位置;t表示当前的时间;c1和c2相当于粒子的加速度,一般取正数;r1,j和r2,j是区间[0,1]之间的随机数,主要是把不确定的因素迭代到算法中,增大算法的随机性;ω为惯性权重,用来衡量上个时刻的速度对于粒子下次运动的影响。
在粒子群优化算法中一个重要的指标就是适应度函数,其不仅可以约束粒子的运动,还能有效地作为目标函数终止粒子的更新[14]。如果选择的不合适可能会导致算法早熟收敛,使得结果陷入局部最优解,最后通过EKF后达不到最优的状态后验估计值。结合EKF的目的是要减小测量过程中的观测噪声影响[15],可以将真实值和滤波后的估计值之间的均方误差作为适应度函数,记作
(3)
2.2 EKF去耦算法过程实现
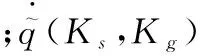
对于卡尔曼滤波而言,可以从与被提取信号相关的量测信号中应用算法对需要的信号做出最优估计。其处理的对象一般是由高斯白噪声引起的随机响应,并且系统的白噪声和量测过程中的白噪声不是卡尔曼滤波滤除的对象。实质上相当于一整套递推的算法,在一个滤波周期内主要包含了时间更新和量测更新的过程,其计算回路和更新过程的框图如图2所示。
图2 卡尔曼滤波的计算回路和更新过程
根据图3所示相控阵雷达导引头制导跟踪回路,可以选取合适的状态变量和量测量,写出EKF的基本滤波方程,从而建立EKF去耦算法的模型。

图3 相控阵雷达导引头制导跟踪回路

为了达到去耦和提取弹目视线角速率的目的,可以选择式(4)系统变量作为状态变量。
(4)
系统的量测量选取为
(5)
该系统的系统方程和量测方程为

Z(t)=H(t)X(t)+v(t)
(6)
其中
(7)
对式(8)进行离散化处理,取步长为Δt,进而得到状态转移矩阵为
Φk/k-1=I+F(t)Δt=
(8)
根据图3系统变量之间的关系,可以计算出
(9)
离散化处理后量测矩阵为
(10)

(12)

3 粒子群优化的EKF去耦算法验证
3.1 粒子群优化的作用
导引头前向通道增益Ks和波束控制增益Kg作为相控阵导引头制导控制回路中影响EKF估计弹目视线角速率的重要参数,对这两个参数进行粒子群优化组合,可以极大地提高后验估计值的精度。并且将优化后的参数组合作为工业生产时的一个重要参考标准,可以适当减小导弹姿态扰动对波束指向的影响。
3.2 仿真结果与性能分析
运用粒子群优化参数的一个重要参考就是适应度,在本算法中优化参数是二维的,所以所选粒子的维数也为2,分别表示Ks和Kg。考虑到弹上嵌入式计算机的工作能力,为了防止粒子数选取过大带来的计算时长问题,粒子数取40,一定程度上既能保证不陷入局部最优,也能使计算时间控制在一个能够接收的范围[16-17]。由于在本算法中选取的适应度函数表示均方误差值,典型的线性递减惯性权重在初期虽然全局的搜索效果很好,但是随着其值的减小容易陷入局部最优,不利于寻找最优解[18-19],所以选取固定的惯性权重值,参考文献[20-21]推荐的固定权重ω1=0.6。在加速度因子选取上主要参考文献[22]给出的常数值c1=c2=1.5。算法最大迭代次数为500次,避免因为没有找到最优解而陷入死循环。在导弹跟踪的过程中,为了可以有效地输出视线角速率信息,提高导弹的命中精度,需要控制俯仰方向上的角速率误差幅值在0.05°/s以内,偏航方向上的误差幅值在0.1°/s以内,此时对应的适应度值约为0.006 4,所以可将适应度满足条件设定为不超过10-3。EKF算法中功率谱取Sw1=Sw2=0.002 W/Hz,Sv=0.03 W/Hz时,对Ks和Kg的适应度进行仿真,图4为适应度与迭代次数的曲线图。
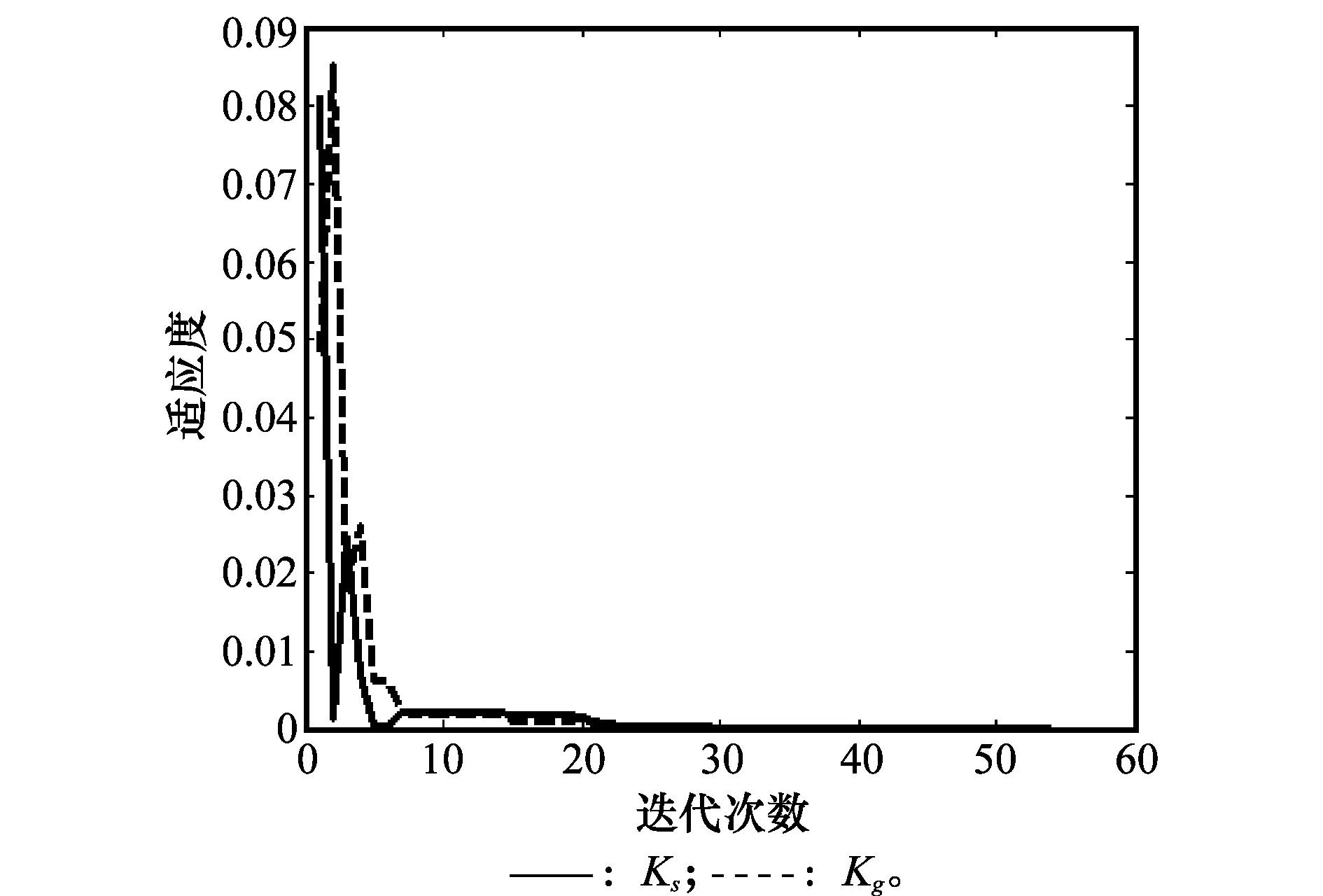
图4 适应度与迭代次数曲线图
可见当粒子群迭代到23次左右时,Ks和Kg的值达到符合条件的最优解,此时的适应度约为6.001 24×10-4,其实际的意义就是经过EKF滤波后真实值与估计值的均方差值,表明此时所得到的估计是最优的后验估计值。其对应的Ks和Kg值分别为10.863和1.024,考虑到工业设计的实际,取前向通道增益Ks为10,波束控制增益Kg为1。计算此时的适应度值为6.113 25×10-4,与调整前的适应度误差在10-3~10-4,由于适应度满足的条件为不超过10-3,所以调整后的值是可取的。
确定滤波参数Ks和Kg后,通过EKF进行去耦和视线角速率的提取。由于在实际的导弹飞行中滚动姿态趋于稳定,因此在仿真时不考虑滚动角带来的影响。设定仿真条件为
式中,φ、ϑ、γ分别是导弹姿态的俯仰角、偏航角和滚动角;qy和qz是真实的俯仰方向和偏航方向的弹目视线角;fm一般取3 Hz。
选取两个增益Ks和Kg分别为10和1,经过EKF滤波后提取俯仰和偏航两个方向的视线角速率,计算此时的误差值,给出粒子群优化EKF去耦算法估计误差值图,如图5所示。同时在Ks=20,Kg=1.1的条件下得到常规EKF视线角速率提取值误差图如图5所示。在相同的仿真条件下给出当下主流的波束误差补偿去耦算法的误差值图,如图5所示。对比波束误差补偿算法的误差值和粒子群优化后EKF去耦算法的误差值发现,在相控阵雷达导引头去耦上,优化后的算法更具有优势。
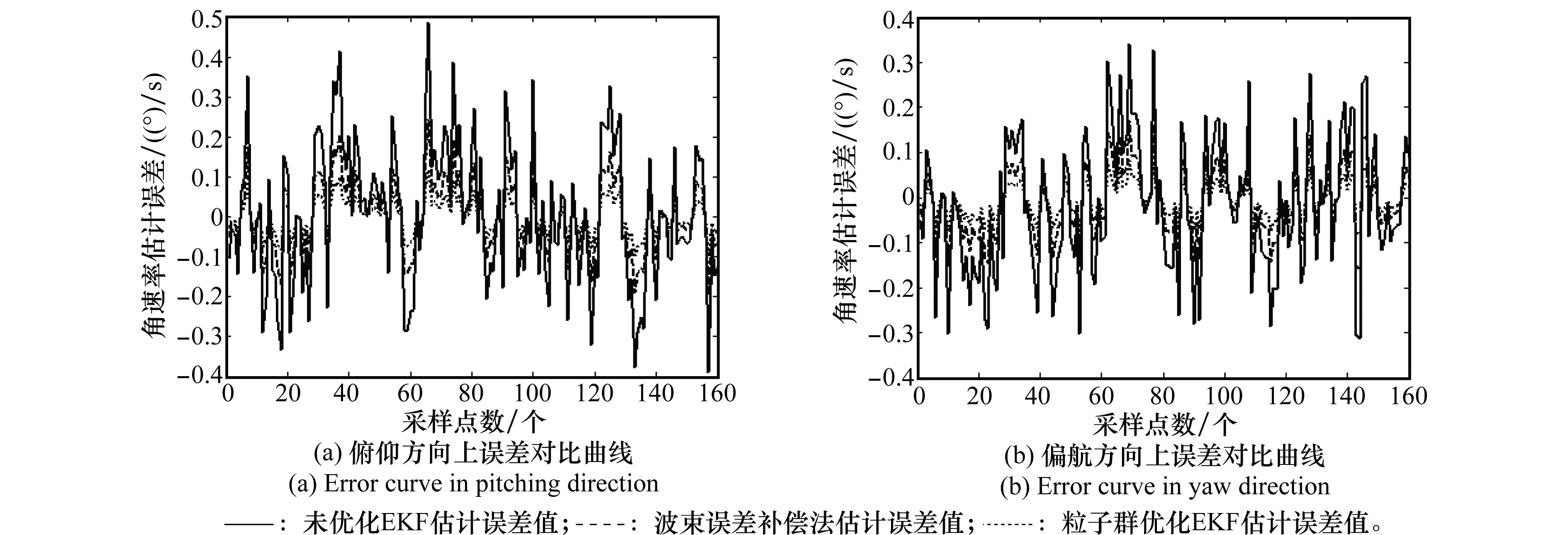
图5 3种算法视线角速率提取值的误差曲线
为了更清晰地表征算法的优良性,表1给出了Ks=10时不同Kg对各误差以及适应度的影响情况,表2给出了Kg=1时不同Ks对各误差以及适应度的影响情况。
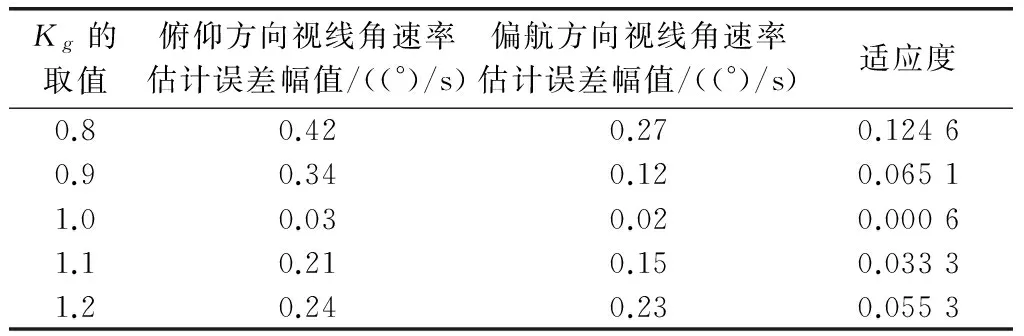
表1 Ks=10时不同Kg对各误差以及适应度的影响情况
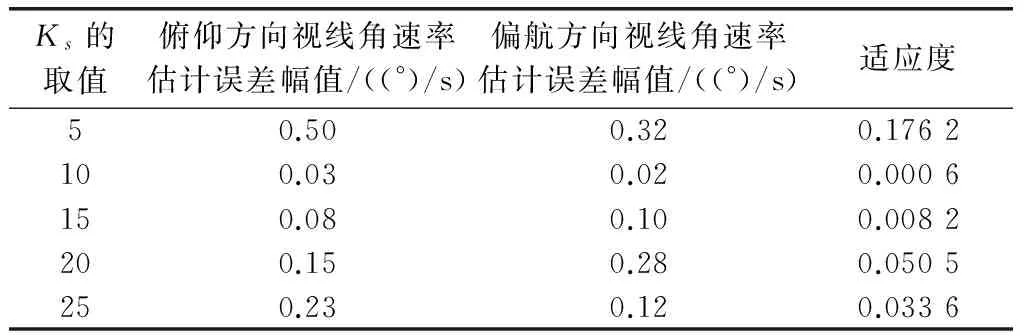
表2 Kg=1时不同Ks对各误差以及适应度的影响情况
由图5可知,虽然常规的EKF去耦算法在提取视线角速率上拟合性较好,但是没有粒子群优化后的EKF算法的精度高。尤其是通过表1和表2对比发现,不同的Ks和Kg组合所导致提取视线角速率的误差值和适应度也相差很大,可以认为Ks和Kg是不相关的两个增益参数[23],因此当Ks=10和Kg=1时,EKF提取值效果最好,同时也验证了粒子群优化得到参数的准确性。
4 结 论
首先通过粒子群优化的EKF算法对导引头前向通道增益Ks和波束控制增益Kg进行优化组合,然后进行滤波,使得视线角速率的提取值误差控制在一个较小的范围内,不仅有效地解决了因Ks和Kg取值不当引起误差值过大的问题,而且提高了弹目视线角速率提取值的精度。最后仿真结果表明,在系统不同的增益条件下,隔离弹体扰动的程度也有很大的差别,这为实际工程中设计相控阵雷达导引头前向通道增益Ks和波束控制增益Kg提供了重要的理论依据和参考价值。
参考文献:
[1] 贾鑫,罗艳伟,罗丽.全捷联导引头解耦技术方法[J]. 战术导弹技术, 2013, 34(1): 77-81.
JIA X, LUO Y W, LUO L. Research on decoupling methods of strapdown seeker[J].Tactical Missile Technology,2013,34(1): 77-81.
[2] ROCK J C, MULLINS J H, BOOTH J P. The past, present, and future of electronically-steerable phased arrays in defense applications[C]∥Proc.of the IEEE Aerospace Conference, 2008: 1-7.
[3] 鲁天宇,尹健,夏群利,等.基于波束角误差补偿的相控阵导引头解耦算法[J].系统工程与电子技术,2015,37(9):2123-2128.
LU T Y, YIN J, XIA Q L, et al. A kind of decoupling algorithm of phased array seeker based on beam angle error compensation[J]. Systems Engineering and Electronics, 2015, 37(9): 2123-2128.
[4] 樊会涛,杨军,朱学平.相控阵雷达导引头波束稳定技术研究[J].航空学报,2013,34(2): 387-392.
FAN H T, YANG J, ZHU X P. Research on beam stable technology of phased array radar seeker[J]. Acta Aeronautica et Astronautica Sinica, 2013, 34(2): 387-392.
[5] 李秋生.相控阵雷达导引头捷联去耦技术研究[J]. 制导与引信, 2005, 26(2): 19-22.
LI Q S. Strapdown decoupling technique research on phased array radar seeker[J]. Guidance and Fuze, 2005, 26(2): 19-22.
[6] ELGAME S A, SORAGHAN J. Target tracking enhancement using a Kalman filter in the presence of interference[C]∥Proc.of the Geoscience and Remote Sensing Symposium,2009:681-684.
[7] ROTSTEIN H, REINER J, BEN-ISHAI A. Kalman filter mechanization in INS/Seeker fusion and observability analysis[C]∥Proc.of the AIAA Guidance, Navigation, and Control Conference and Exhibit, 2001: 2001-4402.
[8] VERGEZ P L, MCCLENDON J R. Optimal control and estimation for strapdown seeker guidance of tactical missiles[J]. Journal of Guidance, Control,and Dynamics,1982,5(3):225-226.
[9] YUN J, RYOO C K, SONG T L. Strapdown sensors and seeker based guidance filter design[C]∥Proc.of the International Conference on Control, Automation and Systems, 2008: 468-472.
[10] CHEN J, LI J H, YANG S H, et al. Weighted optimization-based distributed Kalman filter for nonlinear target tracking in collaborative sensor networks[J]. IEEE Trans.on Cybernetics, 2017, 47(11): 3892-3905.
[11] 宗睿. 导引头天线罩误差及相控阵导引头波束指向误差在线补偿方法研究[D]. 北京: 北京理工大学, 2016.
ZONG R. Research on online compensation methods for radome error of seeker and beam direction error of phased array seeker[D]. Beijing: Beijing Institute of Technology, 2016.
[12] 张旭辉,林海军,刘明珠,等.基于蚁群粒子群优化的卡尔曼滤波算法模型参数辨识[J].电力系统自动化,2014,38(4):44-49.
ZHANG X H, LIN H J, LIU M Z, et al. Model parameters identification of UKF algorithm based on ACO-PSO[J]. Automation of Electric Power Systems, 2014, 38(4): 44-49.
[13] YANG G, ZHOU F R, MA Y, et al. Identifying lightning channel-base current function parameters by powell particle swarm optimization method[J]. IEEE Trans.on Electromagnetic Compatibility. 2017, 60(1): 182-187.
[14] LI J, ZHANG J Q, JIANG C J. Composite particle swarm optimizer with historical memory for function optimization[J]. IEEE Trans.on Cybernetics, 2015, 45(10): 2350-2363.
[15] 秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].3版.西安:西北工业大学出版社, 2015.
QIN Y Y, ZHANG H Y, WANG S H. Kalman filtering and integrated navigation principle[M]. 3rd ed. Xi’an: Northwestern Polytechnical University Press, 2015.
[16] WANG L, YANG B, ORCHARD J. Particle swarm optimization using dynamic tournament topology[J]. Applied Soft Computing, 2016, 48(16): 584-596.
[17] SARKER R A, ELSAYED S M, RAY T. Differential evolution with dynamic parameters selection for optimization problems[J]. IEEE Trans.on Evolution Computation, 2014, 18(5): 689-707.
[18] ZHANG L, TANG Y, HUA C, et al. A new particle swarm optimization algorithm with adaptive inertia weight based on Bayesian techniques[J].Applied Soft Computing,2015,28(C): 138-149.
[19] JI W, WANG J, ZHANG J. Improved PSO based on update strategy of double extreme value[J]. International Journal of Control & Automation, 2014, 7(2): 231-240.
[20] TRELEA I. The particle swarm optimization algorithm: convergence analysis and parameter selection[J]. Information Processing Letters, 2003, 85(6): 317-325.
[21] EBERHART R C, SHI Y. Comparing inertia weights and constriction factors in particle swarm optimization[C]∥Proc.of the Congress on Evolutionary Computation, 2000: 84-88.
[22] SHI Y, EBERHART R C. A modified particle swarm optimizer[C]∥Proc.of the IEEE International Conference on Evolutionary Computation, 1998: 69-73.
[23] 朱振虹,夏群利, 蔡春涛, 等. 相控阵导引头去耦及视线角速率提取算法研究[J]. 战术导弹技术, 2013, 6(5): 70-75.
ZHU Z H, XIA Q L, CAI C T, et al. Research on phased array seeker decoupling and line of sight rate extraction algorithmic[J]. Tactical Missile Technology, 2013, 6(5): 70-75.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
电子制作(2019年24期)2019-02-23
电子制作(2019年23期)2019-02-23
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
现代防御技术(2016年1期)2016-06-01
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06