
基于改进最速下降LCMV算法的稳健波束形成
2018-04-09 07:25冯晓宇谢军伟
传感器与微系统 2018年4期
冯晓宇, 谢军伟, 张 晶, 王 博
(1.空军工程大学 防空反导学院,陕西 西安 710051;2.空军工程大学 理学院,陕西 西安 710051)
0 引 言
波束形成器[1,2]的设计旨在增强期望信号的同时抑制干扰,基于线性约束最小方差(linear constrained minimum variance,LCMV)准则的自适应波束形成算法通过权矢量的调整在保证期望信号增益的同时使总功率最小,从而得到对干扰和噪声功率的抑制。但在实际的应用中,指向误差、阵元位置误差以及阵元相位误差都会使得算法性能下降[3]。针对波束形成对误差的敏感性问题,文献中提出的稳健自适应波束形成算法有子空间投影算法[4~7]以及各种对角加载方法[8~10]等,文献[11]提出了实现矢量线列阵波束形成的矢量矩阵最小方差无畸变响应(vector array minimum variance distortionless response,VTAMVDR)算法,但以上方法均存在运算量大的问题。文献[12]基于线性约束最小均方(least mean square,LMS)更新最优权矢量,通过搜索相位误差以补偿约束导向矢量从而得到期望信号的真实导向矢量,但初始导向矢量必须选在靠近真实导向矢量的范围内。文献[13]针对常规LCMV算法的矩阵求逆运算量大的问题,提出了基于最速下降法(steepest descent,SD)搜索权矢量及导向矢量的改进LCMV算法,提高了算法效率。
本文在最速下降法搜索导向矢量的基础上,更新最优权矢量的求解方法:1)通过设置一个权重矢量的范数约束上界更新最优权矢量,得到基于可变加载约束的LCMV算法;2)通过牛顿法计算最优权矢量,得到Newton-SD-LCMV算法。在存在指向误差、阵元位置误差和阵元相位误差的情况下与线性约束LMS算法及递归稳健LCMV算法进行了仿真对比,仿真结果验证了所提算法的稳健性。
1 研究背景
1.1 LCMV波束形成
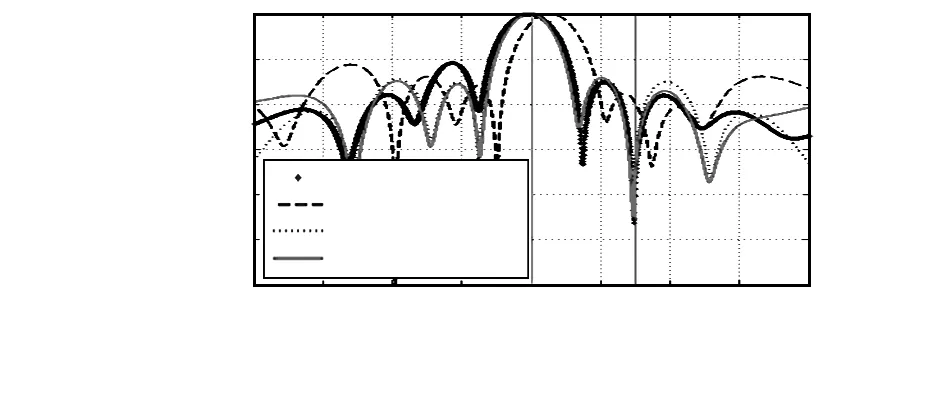
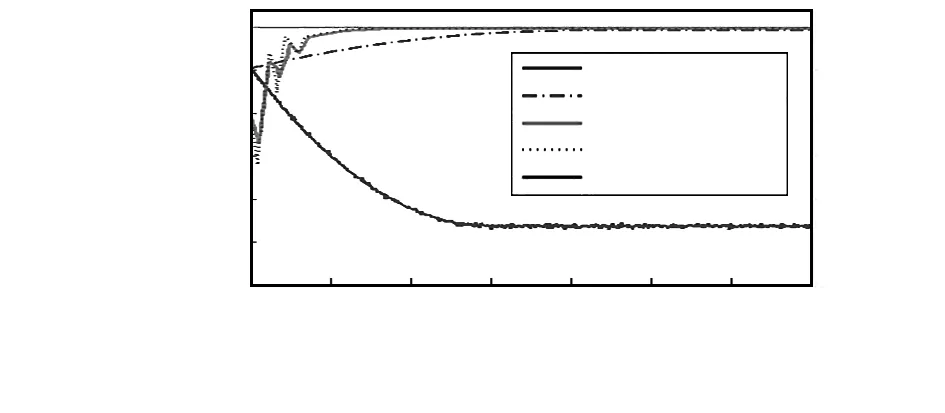
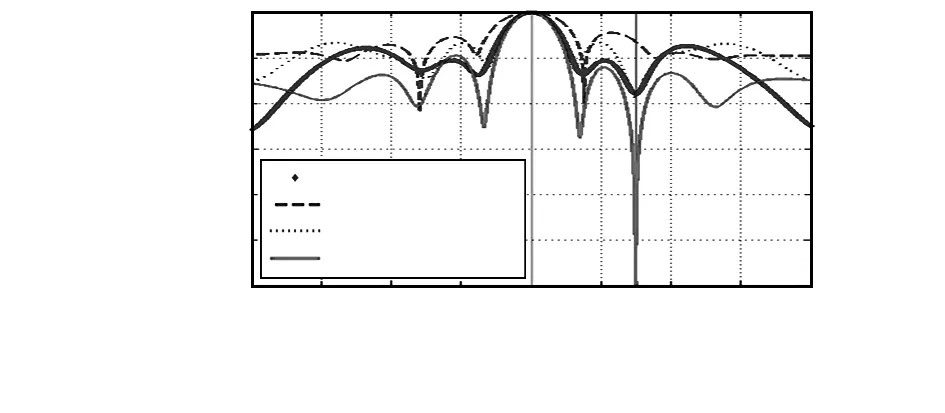
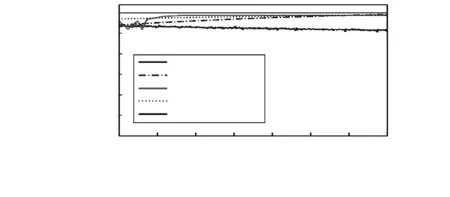
设L个互不相关的窄带信号入射到阵元数为(L (1) 式中s1(k)为期望信号的复包络;si(k),i=2,…,L为非期望信号的复包络;a(θi)为入射角为θi的信号导向矢量;N(k)为噪声矢量。当期望信号、干扰和噪声互不相关时,接收数据的相关矩阵的理论表达式为 R=E[xH(k)x(k)] (2) R=Rs+Ri+Rn (3) 式中Rs,Ri和Rn分别为期望信号、干扰信号和噪声的相关矩阵;H为共轭转置。 波束形成器的输出可表示为 y(k)=wHx(k) (4) 式中w为权矢量。 实际阵列接收数据的协方差矩阵可通过快拍数得到 (5) LCMV实际用于求解如下约束问题 (6) (7) 以权矢量为自变量使用拉格朗日乘子法构造代价函数 (8) 使权矢量沿最速下降方向即负梯度方向搜索最优值的迭代表达式如下 (9) (10) 通过式(5)中的瞬时值估算得到的协方差矩阵往往与真实值的误差较大,LMS算法中通过叠加的方式更新协方差矩阵,以降低估计误差 (11) 文献[12]提出了一种递归的稳健LCMV波束形成算法。当假定的导向矢量与实际的期望信号导向矢量失配时,通过搜索相位误差以补偿约束导向矢量从而得到期望信号的真实导向矢量。当相位误差Δφ相对较小时,真实的期望信号导向矢量可采用一阶泰勒展开的方式表示为 a(Δφ)=a(0)+a′(0)Δφ (12) 将式(6)的最优化问题等效表示为 (13) 当Δφ较小时,将式(12)代入式(13)中可得最优解 (14) 当Δφ较大时,可采用负梯度搜索的方法迭代得出Δφ Δφ(n+1)=Δφ(n)-μΔφΔφJ,n=0,1,… (15) 最速下降在最优值附近存在的锯齿抖动现象会使最优值的收敛速度减缓。对于二次凸函数,牛顿法经过有限次迭代必然达到极小值,且具有二次终止性。针对式(6)的最优化问题,以权矢量为自变量使用拉格朗日乘子法构造代价函数 (16) 式中J2为二次可微函数;wn为J2极小点的一个估计。在wn将J2展开成泰勒级数并取二阶近似 (17) 由上式可得权矢量的迭代公式为 (18) 在波达方向估计存在偏差,假定导向矢量及真实导向矢量失配的情况下,可通过搜索方法求得真实的导向矢量,由文献[13]可得如下约束条件 (19) (20) 由文献[12]知ε的取值对算法性能的影响较小,本文中取ε=1.5。沿负梯度方向进行搜索可得导向矢量迭代公式 a(n+1)=a(n)-μ3[2-1a(n)+ (21) 式中μ3为步长因子。采用式(11)估计协方差矩阵,-1a(n)可近似为w(n+1),导向矢量的最终迭代公式为 a(n+1)=a(n)-μ3[2w(n+1)+2λ3a(n)- (22) (23) (24) 通过对权重矢量的范数设置一个上界约束,提高波束形成器的稳健性能,将式(6)的优化问题模型改写如下 (25) 采用拉格朗日乘子法构造代价函数 (26) 采用最速下降方向即负梯度方向作为搜索方向,得到权矢量的迭代公式如下 (27) (28) 得到权重迭代公式如下 w(n+1)=P[w(n)-μyH(n)x(n)]+F-ημPw(n) (29) b1η2+b2η+b3=0 (30) 式中b1=[μPw(n)]H[μPw(n)];b2=-2Re{[μ·Pw(n)]H[P(w(n)-μyH(n)x(n))+F]};b3=‖P[w(n)-μyH(n)x(n)]+F‖2-δ。 采用式(22)在最速下降方向上搜索真实导向矢量。 仿真条件:8阵元半波长均匀线阵,期望信号的方向为0°,干扰信号的方向为30°,信噪比及干噪比均为10 dB,μ1=0.000 01,Δφ=0.05,μ3=0.000 01,δ=9.965 6×10-4,μ=0.01,噪声为高斯白噪声,以下仿真结果通过100次Monte Carlo实验得到。 1)期望信号存在角度指向误差时算法的稳健性分析。假设期望信号存在Δθ= 5°的角度指向误差,从图1、图2(图1的零陷位置放大图)可以看出,线性约束LMS算法不具备对误差的稳健性,波束指向在误差方向上,在干扰位置没有形成零陷,递归稳健LCMV算、Newton-SDLCMV以及基于可变加载约束的SD-LCMV算法均可以在真实期望信号方向是形成主波束,并在干扰方向上形成零陷,其中Newton-SD-LCMV、基于可变加载约束的SD-LCMV算法在干扰信号方向可以形成更深的零陷。 图1 指向误差为5°的阵列天线方向图 图2 零陷位置 图3为输出信干噪比(signal to interference plus noise power radio,SINR)随快怕数变化的情况,线性约束LMS性能非常差,有10 dB以上的损失,而递归稳健LCMV算法、Newton-SD-LCMV以及基于可变加载约束的SD-LCMV均可以收敛到理论值附近。其中收敛速度由快到慢依次为Newton-SD-LCMV、递归稳健LCMV算法、以及基于可变加载约束的SD-LCMV算法。 图3 SINR随快拍数的变化曲线 2)存在阵元位置误差条件下各算法的稳健性仿真。假设阵元位置误差服从0至信号半波长之间的均匀分布,从图4的方向图可以看出:线性约束LMS的波束指向出现偏移并且在干扰位置没有形成零陷,Newton-SD-LCMV对阵元位置误差的稳健性最好,递归稳健LCMV算与基于可变加载约束的SD-LCMV算法性能近似,图5的SINR曲线反映出Newton-SD-LCMV、基于可变加载约束的SD-LCMV算法的性能仍优于线性约束LMS,与递归稳健LCMV算法一样均可以收敛到理论值附近。 图4 存在阵元位置误差的阵列天线方向图 图5 SINR随快拍数的变化曲线 3)各阵元存在随机相位误差分析。假设随机相位误差服从0~2π均匀分布。从图6的方向图可以看出:Newton-SD-LCMV、基于可变加载约束的SD-LCMV算法主波束都能准确指向真实期望信号方向,并在干扰方向形成零陷,而线性约束LMS算法及递归稳健LCMV算法已失效。从图7的SINR曲线看出,线性约束LMS及RLSVL均有较大的性能损失,但Newton-SD-LCMV、基于可变加载约束SD-LCMV算法的稳态性能仍能较为接近理论值。 图7 SINR随快拍数的变化曲线 本文针对最优权矢量解算,提出了基于牛顿法及可变加载约束的改进SD-LCMV算法,在存在指向误差的情况下,将两者与线性约束LMS算法及递归稳健LCMV算法进行仿真对比,结果验证了改进算法对指向误差、阵元位置误差和阵元相位误差的稳健性。但最速下降法存在锯齿抖动问题,在最优值附近进行迭代寻优效率较低,下一步将对此展开进一步的分析研究。 参考文献: [1] 陈希信,尹成斌,王 峰.一种天波超视距雷达自适应波束形成方法[J].现代雷达,2015,37(1):29-31. [2] 高 岩,李士照.基于极化敏感阵列的数字波束形成方法[J].无线电工程,2015,45(5):50-52. [3] Stoica Petre,Wang Z S,Li J.Robust capon beamforming[J].IEEE Signal Processing Letters,2003,10(6):172-175. [4] 刘晓军,刘聪锋,廖桂生.子空间投影稳健波束形成算法及其性能分析[J].系统工程与电子技术,2010,32(4):669-673. [5] 杨志伟,廖桂生,曾 操.存在幅度/相位误差的稳健波束形成[J].系统工程与电子技术,2007,29(7):1034-1036. [6] 张小飞,徐大专.基于斜投影的波束形成算法[J].电子与信息学报,2008,30(3):585-588. [7] 郭庆华,廖桂生.一种稳健的自适应波束形成器[J].电子与信息学报,2004,26(1):146-150. [8] Gu Jing.Robust beamforming based on variable loading[J].Electronics Letters,2005,41(2):55-56. [9] Selen Y,Abrahamsson R,Stoica P.Automatic robust adaptive beamforming via ridge regression[J].Signal Processing ,2007,88(1):33-49. [10] Du L,Li J.Fully automatic computation of diagonal loading levels for robust adaptive beamforming[J].IEEE Transactions on Aerospace and Electronic Systems,2010,46(1):449-458. [11] 李海涛,李智忠,宋志杰,等.一种新的矢量传感器线列阵波束形成算法[J].传感器与微系统,2015,34(10):144-150. [12] 邓 欣,廖桂生,刘宏清.递归的稳健LCMV波束形成算法[J].系统工程与电子技术,2007,29(3):449-452. [13] 燕 飞,赵书敏.基于最陡下降的稳健LCMV波束形成算法[J].计算机仿真,2012,29(6):117-139. [14] 路成军,盛卫星,玉兵,等.基于可变加载的稳健并行波束形成算法[J].南京理工大学学报,2013,37(3):371-377.
1.2 线性约束LMS算法

1.3 递归稳健LCMV算法


2 Newton-SD-LCMV算法




3 基于可变加载约束的SD-LCMV算法




4 仿真及实验验证


5 结 论
猜你喜欢
数学物理学报(2022年4期)2022-08-22
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
中学生数理化·高一版(2021年2期)2021-03-19
成都信息工程大学学报(2021年6期)2021-02-12
舰船科学技术(2020年3期)2020-04-22
通信技术(2019年3期)2019-05-31
中央民族大学学报(自然科学版)(2018年3期)2018-11-09
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05
