
基于微动测量原理的高速船艏部结构运动规律研究
2018-04-26 01:41郑如炎牟金磊
中国修船 2018年1期
邱 磊,郑如炎,彭 飞,牟金磊
(1.海军驻葫芦岛四三一厂军事代表室,辽宁 葫芦岛 125000 ; 2.海军工程大学,湖北 武汉 430033)
海上高速船[1]是指设计静水时速在海上超过25 kn的一类高性能船舶,具有优良的操纵性、耐波性、快速性与稳定性,主要类型[2]包括滑行艇、水翼船、气垫船、地效翼船等。我国自主设计制造的海上高速船正朝着大型化、实用化发展。
海上高速船在高速航行时,艏部结构不断遭受到砰击载荷[3]与波浪载荷作用,若船首空舱结构以整体运动为主,位移方向上存在一致性,即出现“悬臂梁效应”,相反,若船首空舱结构以局部运动为主,位移方向上不存在一致性,即未出现“悬臂梁效应”。当船首结构出现所谓的“悬臂梁效应”时,由于海上高速船,尤其是双体船的特殊性,其在受到横向力作用下会在“悬臂梁”根部产生支反力,这往往会导致船首结构发生疲劳裂纹、变形等威胁[4],严重危害船舶与船员的安全。因此,有必要对海上高速船艏部空舱结构运动规律进行研究。
首先以某海上高速船为试验样船,将微动测量点安装在试验样船艏部结构的典型位置,然后通过微动测量系统测量不同工况下船首片体某纵向构件典型位置位移变化情况,进而对艏部结构运动规律进行研究探讨。
1 微动测量系统基本原理
1.1 微动测量系统原理
位移微动测量系统[5]是以摄影测量学为基础,主要利用Multipoint软件对测量数据进行实时自动采集与存储,并采用亚像素定位技术对相机坐标系下的系统拍摄的图像进行世界坐标系下的旋转、平移等转化计算,进而得到测点在三维世界坐标系下的几何与运动参数。
1.2 精度估算
当试验仪器稳定且测量环境良好,测量精度[6]主要取决于系统拍摄图像的放大倍数以及标志点提取的精度。
试验中位移微动测量系统采用分辨率为1 280×1 024的图像,仪器视场角为±15′,标志点提取的精度为0.2个像素。通过计算可得测量结果的误差仅为0.1 mm,可以保证测量结果的可靠性。
2 实船试验
2.1 测点布置
试验中对船首片体内舷4个肋位区间内某纵向构件4个位置进行位移监测。根据现场勘测,#28肋位结构较稳定,变形小,故试验中将初始微动测量仪固定在#28肋位。实际测量中,由于微动测量仪的角度问题,不能直接准确测量测点4的位移情况,故增设一个转接微动测量仪,位于#25肋位,具体测点位置如表1所示。4个测点位置的整体分布如图1所示。

表1 片体内舷某纵骨测点位置表

图1 4个测点的整体分布示意图
从图1中不难发现,实际测点位置均采用标靶定点的方法进行标定,各测点的十字相交的黑点为实际测量点,测量船首片体内舷横向(x方向)和纵向(y方向)的位移变化。
2.2 试验工况
试验共分为2个航次的试验,分别为低海况下(3级海况以下)和高海况下(4级海况以上)的实船试验。低海况和高海况试验中,试验样船均相对于波浪取4个浪向角:0°、45°、135°以及180°,低海况航次试验工况如表2所示,高海况航次试验工况如表3所示。各航向测试时间为15 min,试验航向图如图2所示。
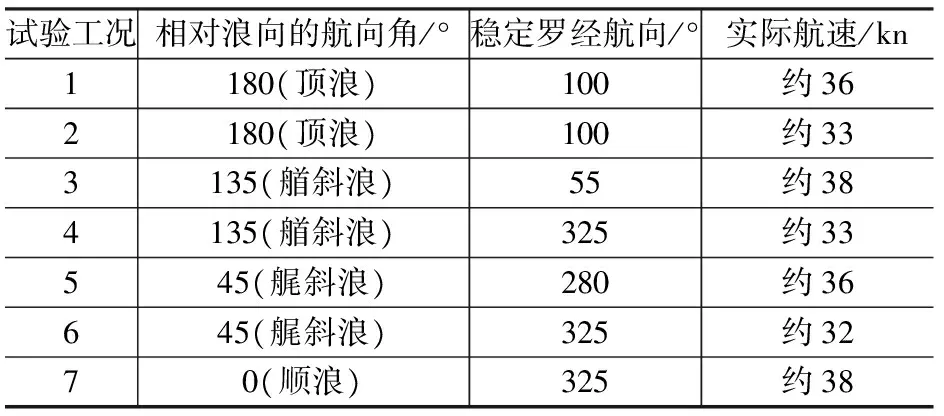
表2 第一航次试验工况(低海况下)

表3 第二航次试验工况(高海况下)

图2 试验航向简图
3 试验结果与分析
对试验数据进行分析,若4个测点在多数时刻应该出现相同方向的位移,且距离参考舱壁越远,位移应该越大,则船首空舱结构以整体运动为主,即出现“悬臂梁效应”。相反,若4个测点的运动以局部运动为主,位移方向上不存在一致性,位移测量值不具有明显的变化规律,则未出现“悬臂梁效应”。试验数据分析流程如图3所示。

图3 船首运动规律分析流程
3.1 测点位移时程曲线
通过对微动测量仪采集的图像信息进行处理,可得到不同工况下各测点的位移时程数据,以第一航次工况1为例,测点1的位移时程曲线如图4所示。鉴于篇幅关系,该工况下其他测点以及其他工况下各测点的位移时程曲线未列入本文中。

图4 测点1测试结果
3.2 位移时程曲线的滤波处理
对于各测点的位移时程曲线,原始数据中存在大量不可忽略的噪声数据,这些噪声会对实验结果产生误差,影响试验准确性以及精度,所以需要对原始数据进行滤波等技术处理[7]。以第一航次工况1为例,经过滤波处理的数据基本保持了数据的变化趋势和幅值,以0~1 000 s区间和40~60 s区间为例,其数据处理前后对比分别见图5和图6所示。

图5 0~1 000 s期间数据处理前后对比图

图6 40~60 s期间数据处理图(滤波前后数据对比)
3.3 空舱结构变形响应模式分析
为分析船首结构运动规律,需要对船首空舱结构在航行中的变形模式进行研究。为确定船首结构的响应模式,在数据处理过程中,选取了大量的时刻,对比同一时刻下4个测点的变形情况,选取部分如图7所示。试验研究表明,各测点在大多数时刻,未出现“悬臂梁效应”,即未呈现明显的整体运动趋势。
4 结束语
通过对某试验样船艏部片体纵向构件典型位置不同工况下位移变化情况、空舱结构变形响应模式进行初步分析,可以得到如下结论。
1)试验中测得4个测点的位移以局部运动为主,整体运动趋势不明显,船首结构未出现明显的“悬臂梁效应”,无需考虑支反力的影响。
2)对海上高速船艏部结构运动规律的研究,可以证明船首结构主要以局部损伤为主,试验结果可为艏部结构疲劳裂纹、变形等机理研究及局部优化提供参考。
3)基于微动测量原理的位移测量系统可为船体结构位移测量提供新思路。

图7 某时刻测点位移变形情况
[1]曹怀昌.“杂交”型海上高速船[J].航海,1993(5):34-35.
[2]OddM.Faltinsen.海上高速船水动力学[M].北京:国防工业出版社,2007.
[3]谢仁杰,董能超,王珂.船舶首部结构入水砰击过程研究[J].舰船科学技术,2017,39(1):21-25.
[4]任慧龙,翟帅帅,于鹏垚,等.砰击载荷作用下船首结构瞬态响应研究[J].中国舰船研究,2013,8(6):14-19.
[5]于起峰,尚洋.摄像测量学原理与应用研究[M].北京:科学出版社,2009.
[6]范绪奇,徐冲.远程微动测量仪在结构健康监测中的应用[J].测绘地理信息,2012,37(4):34-36.
[7]钟萍,丁晓利.GPS结构振动监测数据滤波方法及其性能实验研究[J].测绘学报,2007,36(1):31-36.
猜你喜欢
雷达学报(2018年5期)2018-12-05
雷达学报(2018年5期)2018-12-05
宇航计测技术(2018年3期)2018-09-08
中国军转民(2017年9期)2017-12-19
舰船科学技术(2016年1期)2016-02-27
集装箱化(2014年10期)2014-10-31
现代防御技术(2014年6期)2014-02-28
中国船检(2012年1期)2012-08-04
中国船检(2011年10期)2011-09-12
