动车组制动控制系统半实物仿真平台的设计与实现
2018-04-27 07:18朱琴跃谭喜堂刘榕雄
城市轨道交通研究 2018年3期
朱琴跃 吴 桐 谭喜堂 刘榕雄 陶 灵
(同济大学电子与信息工程学院,201804,上海∥第一作者,副教授)
动车组的高速运行对列车制动性能和制动效果提出了更高要求。制动控制系统作为列车制动系统中举足轻重的关键部分,其性能直接关乎列车的安全运行[1]。如何设计新型制动控制系统或改进现有控制系统的诸项指标,以实现对列车进行安全、可靠和快速制动控制,在业内一直备受关注。由于制动控制系统所实现的诸项性能指标一般都需要通过真车进行实测试验,这将耗费大量时间和经费,且得出的结果数据离散性较大[2-4]。因此,构建制动控制系统的半实物仿真平台,在离线的环境下,通过将部分实物接入仿真回路中,模拟列车的真实运行环境,对制动控制系统的各项性能进行测试,同时验证系统控制算法与控制逻辑的准确性和有效性将显得十分必要。
近年来,半实物仿真技术凭借其良好的经济性和实时性,除了在航空航天、军事、汽车、自动化、通信等领域的广泛应用外,目前也已逐渐被应用到列车控制领域中[5-6]。然而对于制动控制系统而言,关于其半实物仿真的研究还未见展开系统而深入的工作。为此,本文根据CRH2型动车组制动控制系统的各项性能需求,设计了相应的半实物仿真平台的硬件和软件系统;并通过试验测试,验证了所设计平台控制功能和制动性能的有效性,以期为新型制动控制系统制动控制策略的验证以及现有制动控制系统优化和维保提供试验平台,缩短系统设计周期,减少试验和维保成本。
1 制动控制系统基本原理
制动控制系统由制动信号发生装置、制动信号传输装置和电子制动控制装置组成。其中,电子制动控制装置(Brake Electronic Control Unit,BECU)是制动控制系统的核心设备。列车运行时,司机通过司控台上的手柄及按键发出目标减速度等制动信号,BECU通过采集来自外部设备产生的列车运行速度、制动控制命令、制动工况级位、载重信号以及气缸压力等信号参数后,通过运行其系统内部的制动控制程序,实现对空气制动设备的输出驱动控制以及与其他设备间基于多功能车辆总线(Multifunction Vehicle Bus,MVB)的信息传输等功能。其实现的制动功能包括电空混合制动控制、紧急制动控制、防滑控制、保持制动控制[7]。对电空混合制动而言,其制动力分配算法的核心主要包括目标制动力计算、电制动力计算和电空制动力协调分配。本文以CRH2动车组的1个列车单元(一动一拖)为研究对象,作以下分析。
1.1 目标制动力计算
假设将列车看作单质点模型,根据牛顿第二定律并考虑到列车运行阻力W[8]和转动惯量的影响,可将制动过程中列车所需目标制动力FB表示为:
FB=(1+ γ)ma-W (1)
式中:
a——列车制动减速度,m/s2;
m——列车质量,kg;
γ——回转质量系数。
1.2 电制动力计算
列车制动时所能提供的电制动力Fed由列车控制单元(TCU)给出,仿真时主要根据列车再生制动特性曲线通过曲线拟合法计算而得[9]。根据CRH2动车组再生制动特性曲线拟合而得的电制动力计算公式为:
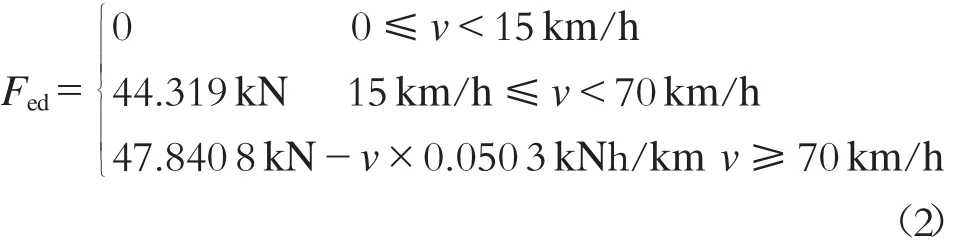
式中:
v——列车运行速度,km/h。
1.3 电空制动力协调分配
电空制动力协调分配采用电制动优先控制算法,当列车发出制动指令时,优先施加动车上的电制动力。当列车制动过程中电制动力无法满足列车所需目标制动力,或列车电制动出现故障无法施加而需补充空气制动力时,优先以拖车空气制动作为补充,直至拖车空气制动力达到某一黏着力限制;如果此时制动力还不能使列车达到规定减速度,则再以动车空气制动力作为补充。在紧急制动情况下,动车不使用电制动,动车和拖车直接施加空气制动来承担各自所需的制动力[9-10]。
假设拖车、动车和基本单元所需的制动力分别为Ft、Fm,动车在制动时所能提供的电制动力为Fed,实际提供的电制动力为Fedu,拖车、动车需要补充的空气制动力分别为Fept、Fepm。下面详细分析不同情况下动车、拖车制动力协调分配过程。
(1)当Fed≥ Ft+Fm时,
Fept=Fepm=0
Fedu=Ft+Fm
即当动车的实际电制动力可以满足1个单元所需目标制动力时,则本单元所需全部制动力均由电制动承担,动车和拖车都不施加空气制动。
(2)当 Ft+Fm> Fed≥ Fm时,
Fepm=0
Fept=Ft-(Fed-Fm)
Fedu=Fed
即当动车的实际电制动力可以满足动车本身制动力需求,但不能满足拖车制动力需求时,拖车将补足一定的空气制动力。
(3)当 Fed≤ Fm
Fepm=Fm-Fed
Fept=Ft
Fedu=Fed
即当动车的实际电制动力连自身的制动力需求都不能够满足时,拖车需要施加一定的空气制动力,而动车也以空气制动补充自身不足的制动力。
(4)当紧急制动采用纯空气制动时
Fepm=Fm
Fept=Ft
2 制动控制系统半实物仿真平台硬件设计
为测试BECU的多种制动功能及性能指标,本半实物仿真平台在设计时尽可能多地接入真实模块的情况下,充分利用半实物仿真技术,给BECU提供一个接近真实的车辆运行环境,即从BECU的角度来观察,该半实物仿真平台与实际车辆运行环境基本没有差别。
2.1 半实物仿真平台总体设计结构
本平台总体设计结构如图1所示,由司机操控台、电子制动控制装置BECU、制动执行装置和工控机4部分组成,可真实模拟列车上一动一拖2节车辆的制动工况,从接受制动指令开始,进行制动控制和输出以及实现基础制动装置实施制动。其中制动执行装置与BECU分为动车与拖车2套装置。
在上述4大部分中,司控台和制动执行装置采用与真车完全相同的硬件设备和部件;工控机则模拟产生与真车要求完全一致的相关信号,并实现相应的功能;而BECU的硬件配置与真车完全一致,其软件部分既可以采用现有列车制动控制算法,也可植入优化后的制动控制优化算法,并通过本半实物仿真平台实现离线环境下对制动控制系统功能的仿真运行和测试。
2.2 司机操控台
司控台由司控器和若干命令操作按钮2部分组成。司控器用于发出1~7级的常用制动、快速制动以及紧急制动级位信号。本系统制动级位信号使用的是PWM(脉冲宽度调制)方式,通过屏蔽双绞线以DC 60 V电压进行传送,调制频率为400 Hz,占空比为11%~80%。制动级位信号可分成常用制动、快速制动、紧急制动、运行状态和手柄取出状态,不同的占空比代表不同的制动级位状态。
操作按钮主要用于产生并输出若干数字信号,数字信号电压为DC 110 V,通过硬连线将信号通过工控机传输至BECU。
2.3 电子制动控制装置BECU
BECU硬件部分采用与真车完全一致的配置,主要接收来自各个传感器、制动命令按钮以及MVB网络等各类信号,根据所接收的信息进行制动力计算后通过调节EP(电空转换)阀并改变制动夹钳的压力,实现制动目的。同时BECU还能够实现防滑控制功能,并能够反馈自身的故障或警告信息。对于列车来说,BECU是整车的制动控制核心。本半实物仿真平台通过为BECU提供接近真实的运行环境,以测试其控制算法和控制逻辑的准确性,其输入输出信号均分别与对应信号源或信号设备相连。经梳理和统计可知,CRH2动车组BECU的数字输入/输出信号均有7类,主要为110 V、24 V电压信号或PWM信号;模拟输入/输出信号则分别有4类和2类,均为4~20 mA电流信号。
2.4 制动执行装置
制动执行装置由空气制动装置、车轮保护防滑装置以及基础制动装置组成,通过接受BECU的输出驱动信号来实现列车的制动功能。空气制动装置主要包括EP阀、紧急阀、保护阀、空重车阀、中继阀、容积室压力开关、容积室压力传感器、紧急阀以及相应的测试接头等。当滑行发生时,车轮防滑保护装置的防滑阀在微机控制单元BECU的控制下产生排风、保压和充风等动作,使制动缸的压力产生相应的变化,以有效控制滑行擦伤,并最大限度利用轮轨间的黏着。基础制动装置采用盘形制动装置,制动时制动气缸充气制动,排气缓解,通过杠杆将制动力传至闸瓦,配合车轮上的制动盘实施制动。
2.5 工控机
工控机采用3块基于PCI(外设部件互连标准)总线的数据采集卡,实现各类模拟数字信号的输入输出功能。同时,它还接收来自司控器的制动控制指令信号与BECU的各类反馈信号,模拟产生实际运行的速度信号,并根据速度信号模拟给出电制动力信号。
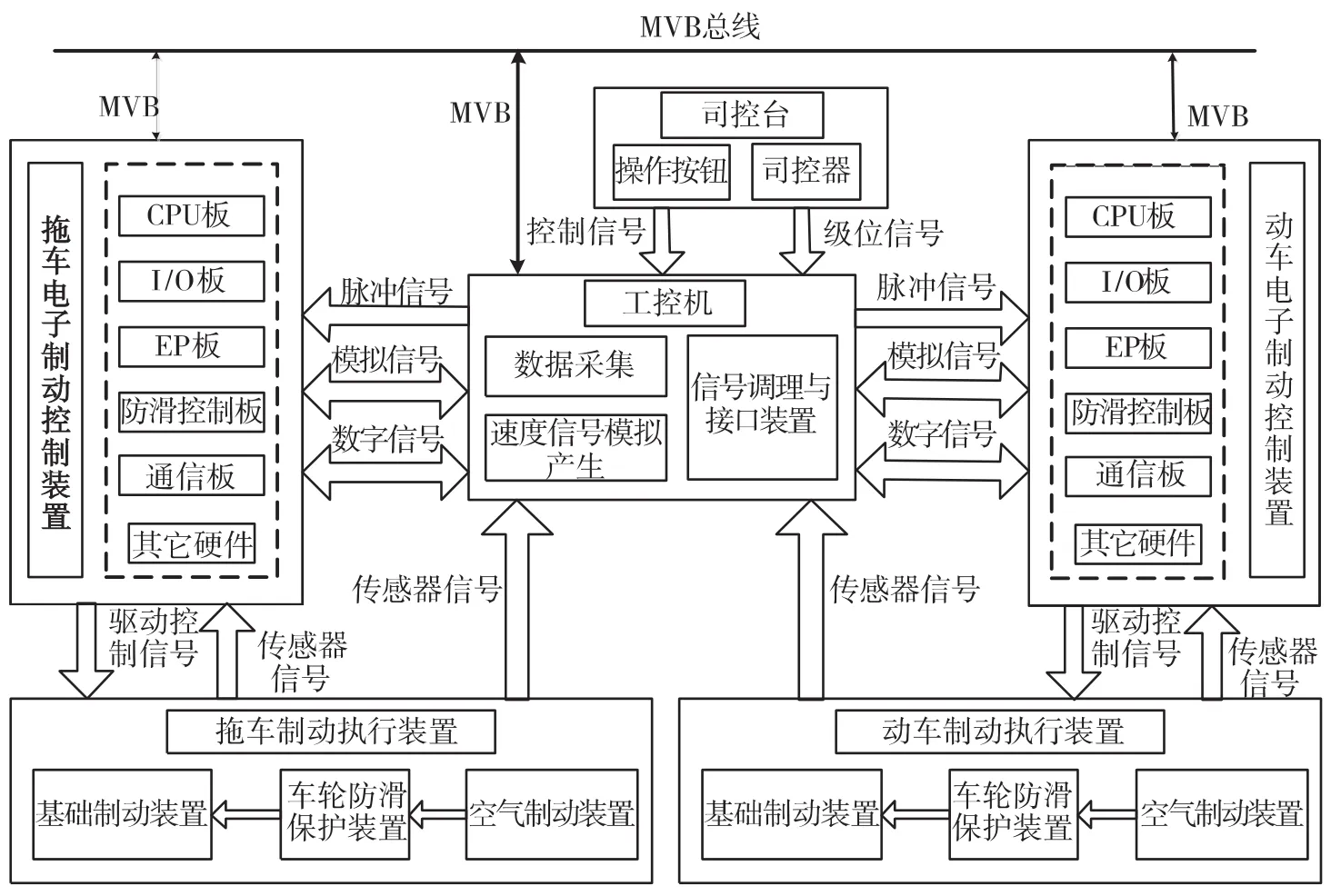
图1 半实物仿真平台总体结构
3 制动控制系统半实物仿真软件设计与实现
3.1 软件设计
本平台基于VC++6.0软件开发环境对各功能模块进行软件设计,总体软件设计结构如图2所示。

图2 总体软件结构
仿真软件根据已建立的数据库,提供典型运行工况下动车与拖车电子制动控制装置所需的各个信号。软件运行时,工控机将采集到制动控制信息通过MVB模块输入BECU;根据设定的列车载重、初始速度、目标速度等信息,通过采集制动缸压力等信号计算列车制动力、制动减速度和下一时刻列车速度,并根据列车再生制动特性曲线(电制动力与速度关系)计算最大可输出电制动力,将其与电制动申请信号相比较,给出电制动力反馈信号;同时,将采集与计算得到的相关运行状态及数据信息进行显示,以此测试制动控制系统的各项性能。相应的总体软件流程如图3所示。
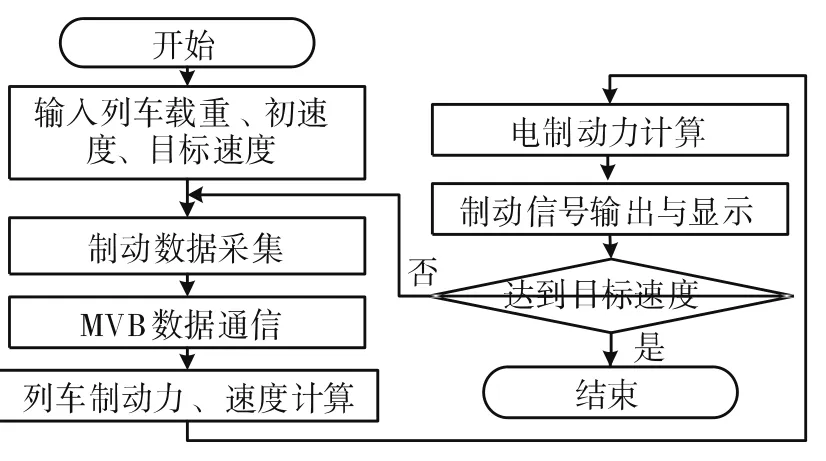
图3 总体软件流程图
3.2 半实物仿真结果与分析
为便于对照分析,本文以CRH2型动车组为应用对象,对其处于快速制动工况下的半实物仿真运行结果进行分析。系统运行中,设定初速度为250 km/h,目标速度为50 km/h,通过电制动力、空气制动力、动车与拖车制动缸压力曲线变化来观察制动控制系统性能。系统相应的运行结果分别如图4~7所示。
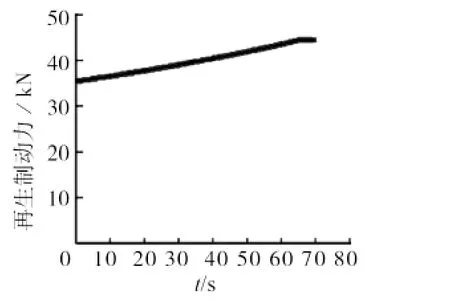
图4 再生制动力曲线
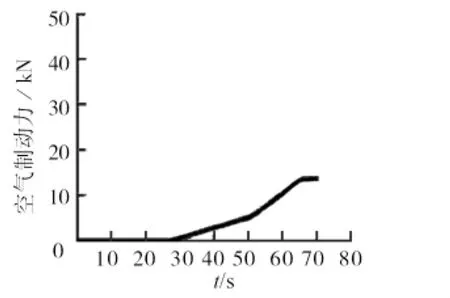
图5 空气制动力曲线
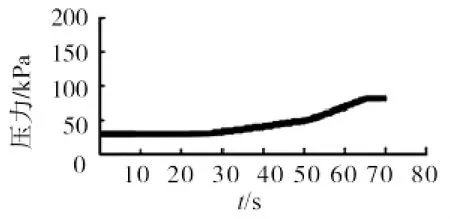
图6 动车制动缸压力曲线
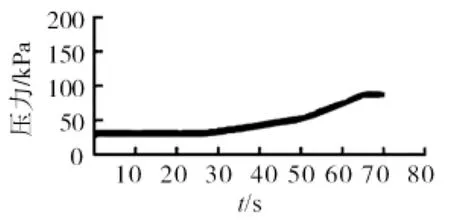
图7 拖车制动缸压力曲线
由图4、5所示电、空制动力曲线可知,在制动开始时,电制动力可满足列车制动力需求,空气制动力不施加;当运行到30 s左右时,由于电制动力已无法满足制动力需求,因此空气制动力缓慢施加,并通过电空制动力协调分配算法对空气制动力进行分配,动车与拖车制动缸同时工作共同承担相应的空气制动力。
由图6、7所示制动缸压力曲线可知,动车与拖车的制动缸压力在30 s之前保持30 kPa预留压力,当需要提供空气制动力时,同样可通过电、空制动力分配算法得到所需施加的空气制动力,并持续工作直至目标速度。
以上运行结果表明,该软件系统能实时采集硬件设备的运行参数,准确计算列车运行速度,并给出相应电制动力和其它控制信号,使软件与硬件有效结合,验证了本制动控制系统半实物仿真平台的有效性和可用性。
4 结语
本平台系统目前已投入现场使用,可对动车组制动控制系统的性能进行测试与分析。测试结果表明,该半实物仿真平台为制动控制系统的研发和技术改进提供了直观、快速、准确的测试和验证手段,同时也为动车组制动系统的维保提供了测试平台,为动车组模拟驾驶人员的技术培训提供了有效平台,达到了预期的目标。
[1] 林祜亭,李和平,王新海,等.城轨交通车辆制动系统的研究[C]∥铁道科学技术新进展——中国铁道科学研究院五十五周年论文集.北京:中国铁道科学研究院,2005.
[2] 刘建.动车组制动控制系统方案设计及仿真研究[D].成都:西南交通大学,2012.
[3] PIECHOWIAK T.Pneumatic train brake simulation method[J].Vehicle System Dynamics,2009,47(12):1473.
[4] 张晶.动车组制动系统建模与仿真研究[D].成都:西南交通大学,2013.
[5] LIANG G,GONG W,LIU H,et al.A semi-physical simulation system for DBF transmitter array on Leo satellite[J].Progress In Electromagnetics Research,2009,97:197.
[6] 司晓伟.基于LabVIEW的高速列车网络控制系统半实物仿真平台研制[D].北京:北京交通大学,2012.
[7] 吴萌岭.微机控制直通电空制动系统研究[D].上海:同济大学,2006.
[8] 饶忠.列车制动(第二版)[M].北京:中国铁道出版社,2010:1.
[9] 孙睿.动车组电空制动系统仿真研究[D].成都:西南交通大学,2008.
[10] 朱琴跃,王景熙,申朝旭,等.地铁列车制动力再分配优化控制研究[J].计算机工程与应用,2015,51(24):227.
猜你喜欢
中学生数理化·中考版(2022年10期)2022-11-10
军事文摘(2021年18期)2021-11-25
数学小灵通·3-4年级(2020年11期)2020-12-14
小哥白尼(趣味科学)(2019年10期)2020-01-18
作文小学中年级(2018年10期)2018-10-29
电子制作(2018年1期)2018-04-04
现代临床护理(2018年5期)2018-03-07
学苑创造·A版(2018年12期)2018-03-04
湖南农业(2016年3期)2016-06-05
阅读(中年级)(2016年8期)2016-05-14